
Адаптер корректор тахометра своими руками схема
Тема начата 5 лет назад, когда впервые столкнулся с проблемой на своей машине: тогда там был 1JZ-GE VVTi, датчик в хвостовике АКПП — единственный и идёт только на блок управления, а сигнал никак не совместим с волговской панелью приборов. www.drive2.ru/l/288230376152556666/
С тех пор оказалось, что тема довольно насущная при свапе тойотовских моторов, прибор пережил некоторое количество обновлений и в нынешнем виде (начиная с января 2016 года) выглядит так
На момент июня 2018 информация частично устарела. Теперь одна и та же модель может работать либо со спидометром, причем от любого датчика, либо с тахометром
Такой прибор позволяет корректировать показания либо спидометра, либо тахометра. Имеется индикация наличия сигнала от датчика, переключение между датчиками с высоким и низким числом импульсов на оборот вала КПП, точная корректировка показаний "на лету", выбор типа приборной панели — также "на лету". В дополнение к этому есть режим генератора сигнала для поиска входа спидометра, если распиновка приборной панели неизвестна.
Сигнал для спидометра можно брать практически отовсюду, но обычно используется датчик на выходном валу АКПП, подключенный штатно к блоку управления. Работа блока управления при этом не нарушается. Также можно использовать колёсный датчик АБС, или 3-выводной датчик Холла, который иногда встречается в МКПП.
Это же самое устройство годится и для корректировки сигнала тахометра — хоть в большую, хоть в меньшую сторону. Для старых тахометров, которые брали входной сигнал с первичной цепи системы зажигания (и рассчитаны на амплитуду сигнала выше 12В) предусмотрен вариант с усилителем сигнала. Плавная регулировка позволяет работать со старыми дизельными двигателями, выход тахометра у которых берётся с генератора и как правило не связан "правильным" соотношением с оборотами двигателя.
Также оказалось, что эти же самые адаптеры могут использоваться в нестандартных случаях, например для оживления блока АБС, для подачи правильного сигнала скорости в блок управления Toyota, если двигатель брался от автомобиля с 4WD, однажды даже брали его для установки блока круиз-контроля от опеля на гольф 4.
В последнее время стала очень актуальна проблема контроля оборотов двигателя автомобиля. Ранее предложенные схемы имеют ряд недостатков, связанных с большим количеством элементов, большим потребляемым током и возможностью контроля оборотов двигателя только в цифровой форме.
2 0 [0]Тахометр-2 или Тахометр своими руками
Предлагаемый ниже тахометр вы можете собрать своими руками, прибор весьма прост по схеме, но обладает хорошими техническими характеристиками, собран на доступных компонентах. Тахометр может оказаться очень полезным при регулировочных операциях с электронными блоками зажигания двигателя автомобиля, при точной установке порогов срабатывания экономайзера и др.
Автор: Бирюков А.
0 0 [0]Тахометр-3
Предлагаю простой, но надежно работающий на моем автомобиле "Форд-Эскорт" электронный тахометр. Прибор имеет двухразрядный цифровой индикатор, показывающий число тысяч и .сотен оборотов в минуту. Питается тахометр от бортовой сети автомобиля и потребляет ток 0,45А.
2 0 [0]Электронный тахометр для автомобиля
Водителю иногда интересно знать, какое число оборотов развивает двигатель автомашины. Определить это можно с помощью несложного электронного тахометра (рис. 1), измерительного прибора, шкала которого градуирована в числах оборотов двигателя. Его удобно расположить поблизости от рулевого управления.
1 0 [0]Электронный тахометр для мотоцикла
Во многих мотоциклах, мопедах, мотонартах и другой мототехиике отсутствует такой важный прибор как тахометр. Предлагаю простой и надежный электронный тахометр. Он рассчитан на работу с одноцилиндровым двухтактным двигателем внутреннего сгорания с контактной или бесконтактной системой зажигания и позволяет измерять частоту вращения коленчатого вала до 10000 об/мин.
2 0 [0] 2012 г. />Тахометр на Arduino
Тахометр - это полезный инструмент для подсчета RPM (оборотов в минуту) колеса или всего, что крутится. Самый простой способ сделать тахометр - это использовать ИК передатчик и приемник. В этой статье мы рассмотрим, как использовать ИК-передатчик и приемник для изготовления тахометра с применением Arduino. Результат отображается на ЖК-дисплее 16х2.
Автор: Касьянов А.
17 0 [0] 28.02.2014 />Простой тахометр с большими цифрами на ATmega8 и LCD 16x2
Предлагаю вариант тахометра на AVR микроконтроллере с большими цифрами на символьном дисплее. Цифры выстраиваются из отдельных сегментов на всю высоту дисплея, что делает показания прибора более читабельными. Рассчитывался на диапазон измерения от 300 до 9999 оборотов в минуту. Но получилось так, что при более высоких (от 10000) об/мин, младший разряд сдвигается за пределы экрана и прибор показывает количество оборотов в минуту, делённое на 10.
!Если есть глюки при работе (взмах стрелки, дрожание и т.п.), обновите прошивку до 8.1 или T2.1 в этом архиве !
Типовой датчик скорости, показания которого используют электронные спидометры и одометры, генерирует импульсы при вращении. Обычно это 600 или 1024 импульса на километр пути, но возможны и другие варианты. Если мы увеличили размерность резины, то на километр может генерироваться уже, к примеру, 930 импульсов вместо 1024, и спидометр покажет меньшую скорость, а одометр занизит пробег.
Рис. 1. Схема электрическая принципиальная корректора спидометра.
Корректор спидометра включается в разрыв провода, идущего от датчика скорости, установленного на коробке передач автомобиля. На вход прибора подаётся сигнал с части провода, идущего к датчику, выход же подключается к части провода, уходящему в приборную панель автомобиля:
Рис. 2. Схема подключения корректора.
Принцип работы.
Для измерения частоты входящих импульсов используется встроенный в DD1 16-и битный таймер Т1 и прерывание INT1. Таймер считает в цикле от 0 до 65535 и далее снова с 0. Каждый отрицательный перепад (1-0) на входе 7 (PD3) DD1 вызывает срабатывание прерывания INT1, в котором запоминается мгновенное значение таймера. Каждое второе срабатывание прерывания, дополнительно, вызывает вычисление периода импульса как разницу значений таймера в момент первого (Start_Time) и второго (Stop_Time) срабатывания прерывания. Полученное значение периода умножается на заранее записанный в энергонезависимую память DD1 поправочный коэффициент и результат запоминается в оперативной памяти DD1 в переменной Timing.
Для формирования выходных импульсов используется тот же самый таймер Т1 и прерывание COMPA. Это прерывание возникает при совпадении мгновенного значения таймера со значением в регистре сравнения OCR1A. В прерывании происходит инвертирование состояния вывода 8 (PD4) DD1 и вычисление следующего значения OCR1A. Это значение получается суммированием текущего значения OCR1A с рассчитанным в предыдущем прерывании значением Timing.
Таким образом, если частота входных импульсов превосходит необходимую частоту выходных импульсов (прибор работает на понижение), значение переменной Timing будет обновляться чаще возникновения прерывания COMPA. В противном случае (если прибор работает на повышение) прерывание COMPA может использовать несколько раз одно и то же значение Timing, прежде чем оно будет пересчитано. В обоих случаях переменная Timing будет всегда содержать некоторое значение и генерация выходных импульсов не будет прервана. За счёт этого прибор может работать при любом соотношении частот входных и выходных импульсов, как на понижение, так и на повышение показаний датчика.
Чтобы исключить «залипание» показаний приборов в случае внезапного прекращения поступления импульсов от датчика (при экстренном торможении или движении в пробке) в микроконтроллере DD1 задействован восьмибитный таймер Т0. Период счёта таймера равен 2 секундам. При каждом возникновении прерывания INT1 происходит обнуление этого таймера, не дающее ему досчитать до максимального значения. Если же таймер досчитает до максимума, он вызовет прерывание TIM0_OVF, в котором произойдёт запрещение генерации выходных импульсов, пока не поступит хотя бы один импульс на вход 7 (PD3) DD1.
За счёт использования единого эталона времени – таймера Т1 – для измерения частоты входящих импульсов и для генерации выходных импульсов, соотношение частот входных и выходных импульсов строго определено поправочным коэффициентом и ничем более. Это свойство используется для сохранения точности прибора во всём диапазоне скоростей автомобиля. Дело в том, что любой таймер микроконтроллера DD1 тактируется от тактовой часты ядра через внутренний настраиваемый делитель. При частоте ядра 16 МГц и коэффициенте деления 1024 частота тактирования таймера составит 15625 Гц, а при коэффициенте 64 – 250 кГц. Время цикла заполнения таймера до значения 65535 составит 4,2 сек и 0,26 сек соответственно. Первый диапазон используется для скоростей до 40 км/ч, второй – для скоростей от 40 до 200 км/ч. Переключение происходит автоматически. Ошибка показаний спидометра в этом случае не превышает 0,5 км/ч в диапазоне скоростей 1…90 км/ч и возрастает до 5 км/ч на скоростях более 200 км/ч.
Выходные импульсы от датчика скорости поступают на вход PD3 микроконтроллера DD1 через формирующую сигнал цепь R1R4C1VD2. R4 является подтяжкой для открытого коллектора выходного каскада датчика скорости, цепь R1С1 фильтрует высокочастотные помехи, VD2 ограничивает напряжение импульсов до безопасного для DD1 уровня 5 вольт. Выходной каскад корректора построен на MOSFET транзисторе VT2. Резистор R9 необходим для защиты DD1 в случае пробоя VT2 и его номинал должен быть не менее 100 ом. Для защиты VT2 от высоковольтных импульсов бортсети автомобиля необходима установка внешнего стабилитрона VD3 на напряжение 20-22 В. На транзисторе VT1 и элементах VD1R2R3R5 собран преобразователь уровней двуполярного сигнала интерфейса RS-232 напряжением ±12 В в однополярный ТТЛ сигнал, воспринимаемый DD1. RC цепь R8C3 необходима для формирования импульса сброса при включении питания DD1, а цепь R6C2 подавляет помехи и дребезг, поступающие от кнопки SB1. Диод VD5 защищает корректор от подключения напряжения питания неправильной полярности, а цепь R10C9VD4C8 фильтрует помехи по питанию и ограничивает высоковольтные всплески (вызываемые работой системы зажигания) до безопасного для DA1 уровня.
Детали и конструкция.
Диод VD1 может быть заменён любым маломощьным кремниевым диодом, например КД522. Диод VD5 – на КД212А или аналогичный с током не менее 100 мА. Стабилитроны VD2, VD3, VD4 заменяемы любыми стабилитронами мощностью не менее 0,5 Вт и напряжениями стабилизации 4,7 и 22В соответственно. В качестве транзистора VT1 подойдёт любой кремниевый npn транзистор (например, КТ315, КТ3102), а в качестве VT2 – любой MOSFET управляемый ТТЛ уровнем и напряжением С-И не менее 20В. Т.к. IRLML2402 исчезает из продажи, его можно заменить более современным IRLML2502. VT3 заменим на любой силовой транзистор типа КТ815Г или аналогичный. Микросхема DA1 может быть заменена любым параметрическим стабилизатором на 5 В с током стабилизации не менее 100 мА, например 7805, S7805, КРЕН5А. Но надо убедиться, что максимальное входное напряжение стабилизатора не менее 25 В и установить VD4 напряжением стабилизации на 3-4 В ниже этого значения. Для L7805 макс. входное напряжение составляет 35 В.
Корректор спидометра рассчитан на установку в автомобили с напряжением в бортсети 12В и подключается после замка зажигания. Все детали (кроме кнопки SB1 и светодиода HL1) монтируются на печатной плате размерами 45*65 мм, которая помещается в пластиковый корпус размерами не менее 50*70*20 мм. Его закрепляют в салоне под торпедо. Светодиод и кнопку (или кнопку со встроенным светодиодом) закрепляют в удобном месте на торпедо. Второй контакт светодиода и кнопки может быть соединён с корпусом автомобиля в любом месте.
Рис. 3. Печатная плата корректора спидометра.

Рис. 4. Внешний вид собранного корректора спидометра.
Программирование микроконтроллера.

Прошивка микроконтроллера состоит из двух частей: для Flash и Eeprom памяти. В микроконтроллер должны быть прошиты оба файла, они, а также исходники прошивки и плата находятся в архиве odometr_data
Управление устройством и режимы работы.
Собранное из исправных деталей и корректно запрограммированное устройство работает сразу и наладки не требует, за исключением ввода поправочного коэффициента (по умолчанию задан коэффициент 1,2). Возможны два способа введения коэффициента: с компьютера через кабель или путём самокалибровки. [метод самокалибровки удалён из поздних версий прошивок, т.к. работоспособен лишь на ограниченной номенктатуре авто и не является универсальным, таким образом, пользуемся ТОЛЬКО загрузкой через кабель] В первом случае необходимо заранее, вручную (например, по показаниям образцовых приборов) рассчитать коэффициент и загрузить в корректор спидометра с помощью программы Data_Sender. При этом коэффициент должен находиться в диапазоне от 0,3 до 3 (хотя известны случаи ввода через программатор коэффициентов от 0,1 до 8 и прибор работал).
Во втором случае корректор спидометра сам рассчитывает коэффициент прямо на автомобиле. Способ, а так же тип датчика, задаётся двумя джамперами, которые устанавливаются на разъёме программирования X3 (рис. 6) и замыкают на землю выводы 19 или 18 DD1. Для программирования корректора спидометра использован стандартный для программаторов фирмы Atmel штыревой 10-и контактный разъём с шагом 2,54 мм. В силу цоколёвки разъёма, контакты 8 и 10, соединённые с выводами 19 и 18 DD1, находятся напротив контактов 7 и 9, соединённых с землёй. После программирования DD1 на выводах 19 и 18 программно подключаются внутренние подтяжки к питанию и эти выводы удобно использовать для задания режимов работы корректора.
Рис. 6. Вид сверху разъёма для программирования с установленными джамперами.
Для задания поправочного коэффициента любым из способов необходимо сначала ввести корректор спидометра в режим калибровки. Для этого требуется удерживая нажатой кнопку SB1 включить питание корректора (от внешнего блока питания или повернуть ключ в замке зажигания, если корректор на автомобиле). В момент включения питания корректор проверяет нажатие на кнопку SB1. Если удерживать кнопку нажатой более 2 с, светодиод HL1 включается и корректор спидометра входит в режим калибровки, если же кнопка не была нажата, корректор входит в обычный режим работы.
Для загрузки поправочного коэффициента через ПК необходим кабель, соединяющий корректор с СОМ портом компьютера. Схема кабеля показана на рисунке 7.
Рис. 7. Схема кабеля и внешний вид разъёмов.
Для подключения к COM порту компьютера используется стандартный девятиконтактный штекер ХР1 типа DB-9F, а для соединения с разъёмом Х1 корректора – двухконтактный штекер ХР2 типа HU-2. Контакт №3 (TxD) штекера DB-9F должен быть соединён с резистором R1 корректора, контакт №5 (GND) – с общим проводом.
Накрутка пробега или тест.
Какое -то время назад ко мне пришел заказчик, который устанавливал, в тот момент, на Газель контрактный японский движок. Проблема, с которой он ко мне пришел, была следующая: Неправильная работа тахометра и спидометра. Дело в том, что датчики на новом движке вырабатывают совсем другое количество импульсов на оборот. Передо мной была поставлена задача сделать настраиваемый конвертер.
Была опробована присутствующая в инете схема на двух мелкосхемах преобразователя частоты в напряжение и, потом, напряжения в частоту. Вот отсюда https://www.drive2.ru/l/3271460/ . Был собран опытный вариант. А так же сделан псевдодатчик с плавной регулировкой оборотов.


Опыты показали, что этому варианту требуется формирователь импульсов ибо с катушки датчика идут слабые по амплитуде импульсы. Необходимо ставить впереди устройства компаратор, ну, например, на LM393. Более того, датчики совсем не идеальны и могут формировать, особенно при малых оборотах, пачку импульсов вместо одного. Такое схемное решение никак не может избавиться от таких помех. Далее, более широкие исследования выявили очень маленький диапазон преобразования частот, как по входной частоте так и по диапазону сдвига. Пришлось изучать даташиты и выискивать формулы расчета необходимых элементов обвязки микросхем. В конечном итоге такая схемотехника была забракована. По совокупности причин. Необходимости подбирать детали, малом диапазоне и нелинейности, отсутствия входного формирователя импульсов. Короче — никакой универсальности.
Поэтому было решено собрать преобразователь с гораздо более широким диапазоном входных и выходных частот. С формирователем импульсов на борту. После долгих экспериментов родилось вот такое устройство. Формирователь импульсов на базе LM393 позволяет подключать любые электромагнитные датчики. Сформированные импуль c ы подаются на цифровой программируемый делитель, который позволяет умножать или делить входную частоту до коэффициента 8,9 с шагом 0,1. На выходе формируется меандр со скважностью 50% и амплитудой 12 V. Многочисленные опыты показали стабильную работу устройства на входных частотах от 300 Герц до 4х герц. Верхняя граница определялась скоростью вращения имеющегося у меня двигателя. Нижняя граница парой датчик — движущийся магнит. Применяемая мною пара просто не давала нужного напряжения для срабатывания компаратора.
Рассматриваемый бесконтактный тахометр – это компактное устройство на микроконтроллере ATMega48 производства компании Atmel, позволяющее измерять высокие скорости вращения бесконтактным способом. Для измерения используется ИК сенсор (оптопара, ИК светодиод и ИК фотодиод в одном корпусе). Вывод данных осуществляется на двухстрочный символьный ЖК дисплей на базе контроллера HD44780.


Принцип работы
ИК сенсор (оптопара), представляющий собой миниатюрный компонент с ИК светодиодом и фотодиодом в одном корпусе, посылает ИК излучение на вращающийся механизм (вал, ротор двигателя), на котором должна быть небольшая отражающая наклейка.
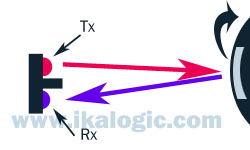
Благодаря этой наклейке, каждый оборот вала вызывает появление отраженного импульса ИК излучения. Используемый сенсор производства компании Vishay Semiconductor имеет маркировку TCND-5000.

Данный сенсор был выбран после тестирования эквивалентных продуктов, так как его корпус обеспечивал оптическую изоляцию передающей и приемной части, а ИК светодиод выдерживает большие токи, что позволяет проводить измерения на больших расстояниях.
Таким образом, используя оптопару мы можем подсчитать время полного оборота вала, а далее, зная время (обозначим это время T в секундах), мы можем вычислит количество оборотов в минуту, используя простое выражение 60/T.
Получение данных от сенсора
Для снижения стоимости устройства и сложности сборки, а также для повышения гибкости системы, мы непосредственно подключим ИК сенсор к микроконтроллеру и программно реализуем всю обработку получаемого сигнала. Сразу стоит заметить, что это не так просто, так как получаемый с ИК фотодиода сигнал содержит шумы, а внешнее освещение постоянно оказывает на него влияние. Таким образом, проблема состоит в том, чтобы разработать устройство с автоматической адаптацией к внешней освещенности и расстоянию до объекта измерения.
На рисунке ниже изображена диаграмма аналогового сигнала от ИК сенсора (фотодиода)

Так как сигнал имеет шумы, при каждом определении наличия и отсутствия импульса (наличие импульса говорит о том, что вал вращается и сенсор «видит» отражающую наклейку), большое количество колебаний «вводит в заблуждение» микроконтроллер. Кроме того, эти факторы не позволяют использовать встроенный в микроконтроллер аналоговый компаратор, и нам необходимо ввести обработку аналогового сигнала перед каждой процедурой подсчета циклов.
Решение было найдено в оценке средней интенсивности, основанную на максимальном и минимальном значении интенсивности сигнала от сенсора, и включением гистерезиса в районе средней интенсивности. Гистерезис используется для предотвращения многократного счета циклов зашумленных импульсов. Рисунок ниже поясняет работу такого алгоритма.
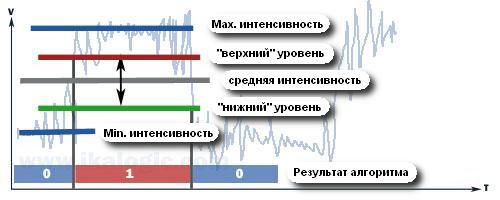
Когда сигнал нарастает от низкого состояния (отсутствует отражение от наклейки на валу) к высокому (отражение ИК импульса), алгоритм возьмет в расчет этот импульс высокого уровня лишь после того, как он пересечет «возрастающий уровень» гистерезиса, и примет в расчет низкий уровень лишь после того, как сигнал пересечет «спадающий уровень» гистерезиса. Такой алгоритм позволяет избежать ошибок вычислений, вызываемых шумным сигналом.
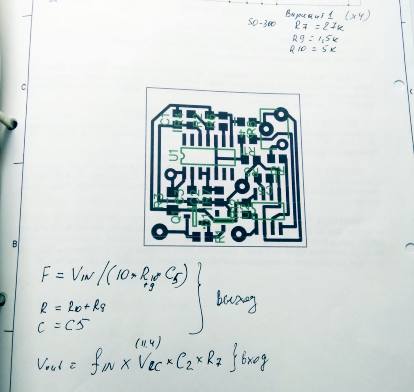
Принципиальная схема устройства
Схемотехническое решение очень простое и компактное (благодаря использованию миниатюрного сенсора), не содержит дорогостоящих компонентов. Питание устройства осуществляется от трех батарей типа AAA.
Как вы, наверное, заметили, отсутствует потенциометр регулировки контрастности дисплея (что также позволяет уменьшить размер устройства). Это возможно благодаря программной реализации алгоритма автоматической подстройки контрастности в зависимости от уровня напряжения питания с применением ШИМ и фильтра низких частот на элементах R3, R4 и C2. Пользователи могут ознакомиться с текстом алгоритма в исходном коде ПО микроконтроллера во второй части статьи.
Разъем JP1 предназначен для внутрисхемного программирования микроконтроллера. Разъем JP2 предназначен для подключения дополнительного пользовательского датчика.
Список примененных компонентов
| Обозначение в схеме | Наименование, номинал |
| IC1 | Микроконтроллер ATmega48 |
| Q1, Q2 | Транзистор BCW66G |
| C1, C2 | 10 нФ |
| C4, C5 | 33 пФ |
| X1 | Кварцевый резонатор 20 МГц |
| R1, R2, R7 | 470 Ом |
| R3 | 1 кОм |
| R4 | 1.5 кОм |
| R5 | 1 МОм |
| R6 | 110 Ом |
| R8 | 70 Ом |
| LED3 | Светодиод |
| IR1 | Оптопара TCND-5000 |
| B1 | Кнопка |
| B2 | Выключатель питания |
| JP1 | Разъем внутрисхемного программирования |
| JP2 | Разъем расширения |
Демонстрация работы бесконтактного тахометра на микроконтроллере AVR
Во второй части статьи рассмотрим конструкцию прибора и основные моменты в программном обеспечении микроконтроллера, включая аналого-цифровое преобразование и организацию обмена данными с ЖК дисплеем.
Читайте также: