
Как должна проходить ось вращения диска чтобы момент инерции относительно этой оси был минимален
Момент инерции является мерой инертности тела при вращательном движении. Он играет такую же роль, что и масса при описании поступательного движения. Но если масса считается величиной постоянной, то момент инерции данного тела зависит от положения оси вращения
Если для какого-либо тела известен его момент инерции относительно оси, проходящей через центр тяжести, то легко может быть найден и момент инерции относительно любой оси, параллельной первой
Теорема Штейнера
где
Jc – момент инерции относительно оси, проходящей через центр тяжести
m – масса диска
d – расстояние между осями
Т.Шнайдера: Момент инерции относительно любой оси вращения равен моменту инерции относительно параллельной ей оси, проходящей через центр тяжести, сложенному с произведением массы тела на квадрат расстояния от центра тяжести тела до оси вращения
Уравнение динамики вращательного движения твердого тела относительно неподвижной оси
Пусть твердое тело вращается вокруг неподвижной оси О–О¢. Разобьем это тело на элементарные участки mi. Выбираем произвольную материальную точку, принадлежащую этому телу. Точка вместе с вращающимся телом описывает окружность. Проведем от точки линию и обозначим ее Ri. Приложим к точке силу Fi
Под действием силы `Fi, направленной перпендикулярно к оси по касательной к окружности, описываемой материальной точкой, движущаяся точка начнет вращательное движение. По второму закону Ньютона
Используем формулу, устанавливающую связь между линейной и угловой скоростью
где w – угловая скорость; у всех точек вращающегося тела она одинакова
Подставим значение линейной скорости в формулу ускорения
Подставим значение ускорения во второй закон Ньютона
умножим обе части последнего равенства на Ri и просуммируем его
где:
- момент силы
-момент инерции
-угловое ускорение
Основное уравнение динамики вращательного движения или второй закон Ньютона для вращательного движения
Как известно, центральные моменты инерции являются наименьшими из всех моментов относительно ряда параллельных осей.
Найдем теперь крайние значения (максимум и минимум) для центральных моментов инерции. Возьмем ось , и начнем ее вращать, т. е. менять угол ; при этом будет изменяться величина
Наибольшее и наименьшее значения этого момента инерции соответствуют углу , при котором производная обращается в нуль. Эта производная равна:
Подставляя в написанное выражение и приравнивая его нулю, получаем:
Таким образом, осями с наибольшим и наименьшим центральными моментами инерции будут главные центральные оси. Так как при повороте центральных осей сумма соответствующих моментов инерции не меняется, то
Когда один из центральных моментов инерции достигает наибольшего значения, другой оказывается минимальным, т, е. если
Следовательно, главные центральные оси инерции — это такие взаимно перпендикулярные оси, проходящие через центр тяжести сечения, относительно которых центробежный момент инерции обращается в нуль, а осевые моменты инерции имеют наибольшее и наименьшее значения.
Лекция № 19. Прямой чистый изгиб стержня
При прямом чистом изгибе в поперечном сечении стержня возникает только один силовой фактор — изгибающий момент Мх (рис. 1). Так как Qy=dMx/dz=0, то Mx=const и чистый прямой изгиб может быть реализован при загружении стержня парами сил, приложенными в торцевых сечениях стержня. Поскольку изгибающий момент Mх по определению равен сумме моментов внутренних сил относительно оси Ох с нормальными напряжениями его связывает выкающее из этого определения уравнение статики
Сформулируем предпосылки теории чистого прямого изгиба призматического стержня. Для этого проанализируем деформации модели стержня из низкомодульного материала, на боковой поверхности которого нанесена сетка продольных и поперечных рисок (рис. 2). Поскольку поперечные риски при изгибе стержня парами сил, приложенными в торцевых сечениях, остаются прямыми и перпендикулярными к искривленным продольным рискам, это позволяет сделать вывод о выполнении гипотезы плоских сечений, которая, как показывает решение этой задачи методами теории упругости, перестает быть гипотезой, становясь точным фактом — законом плоских сечений. Замеряя изменение расстояний между продольными рисками, приходим к выводу о справедливости гипотезы о ненадавливании продольных волокон .
Ортогональность продольных и поперечных рисок до и после деформирования (как отражение действия закона плоских сечений) указывает также на отсутствие сдвигов, касательных напряжений в поперечных и продольных сечениях стержня.
Рис.1. Связь внутреннего усилия и напряжения
Рис.2. Модель чистого изгиба
Таким образом, чистый прямой изгиб призматического стержня сводится к одноосному растяжению или сжатию продольных волокон напряжениями (индекс г в дальнейшем опускаем). При этом часть волокон находится в зоне растяжения (на рис. 2 это—нижние волокна), а другая часть—в зоне сжатия (верхние волокна). Эти зоны разделены нейтральным слоем (п—п), не меняющим своей длины, напряжения в котором равны нулю. Учитывая сформулированные выше предпосылки и полагая, что материал стержня линейно-упругий, т. е. закон Гука в этом случае имеет вид: , выведем формулы для кривизны нейтрального слоя (—радиус кривизны) и нормальных напряжений . Предварительно отметим, что постоянство поперечного сечения призматического стержня и изгибающего момента (Mх=сonst), обеспечивает постоянство радиуса кривизны нейтрального слоя по длине стержня (рис. 3, а), нейтральный слой (п—п) описывается дугой окружности.
Рассмотрим призматический стержень в условиях прямого чистого изгиба (рис. 3, а) с поперечным сечением, симметричным относительно вертикальной оси Оу. Это условие не отразится на конечном результате (чтобы прямой изгиб был возможен, необходимо совпадение оси Оу с главной осью инерции поперечного сечения, которая и является осью симметрии). Ось Ox поместим на нейтральном слое, положение которого заранее неизвестно.
а) расчетная схема, б) деформации и напряжения
Рис.3. Фрагмент чистого изгиба бруса

Рассмотрим вырезанный из стержня элемент длиной dz, который в масштабе с искаженными в интересах наглядности пропорциями изображен на рис. 3, б. Поскольку интерес представляют деформации элемента, определяемые относительным смещением его точек, одно из торцевых сечений элемента можно считать неподвижным. Ввиду малости считаем, что точки поперечного сечения при повороте на этот угол перемещаются не по дугам, а по соответствующим касательным.
Вычислим относительную деформацию продольного волокна АВ, отстоящего от нейтрального слоя на у:
Из подобия треугольников С001 и 01ВВ1 следует, что
Продольная деформация оказалась линейной функцией расстояния от нейтрального слоя, что является прямым следствием закона плоских сечений
Тогда нормальное напряжение, растягивающее волокно АВ, на основании закона Гука будет равно
Эта формула не пригодна для практического использования, так как содержит две неизвестные: кривизну нейтрального слоя и положение нейтральной оси Ох, от которой отсчитывается координата у. Для определения этих неизвестных воспользуемся уравнениями равновесия статики. Первое выражает требование равенства нулю продольной силы
Подставляя в это уравнение выражение (2)
и учитывая, что , получаем, что
Интеграл в левой части этого уравнения представляет собой статический момент поперечного сечения стержня относительно нейтральной оси Ох, который может быть равным нулю только относительно центральной оси. Поэтому нейтральная ось Ох проходит через центр тяжести поперечного сечения.
Вторым уравнением равновесия статики является, связывающее нормальные напряжения с изгибающим моментом (который легко может быть выражен через внешние силы и поэтому считается заданной величиной). Подставляя в уравнение связки выражение для. напряжений, получим:
и учитывая, что где Jx—главный центральный момент инерции относительно оси Ох, для кривизны нейтрального слоя получаем формулу
Кривизна нейтрального слоя является мерой деформации стержня при прямом чистом изгибе. тем меньше, чем больше величина EJх, называемая жесткостью поперечного сечения при изгибе (по аналогии с жесткостью поперечного сечения при растяжении EF).
Подставляя (4) в (2), получаем формулу для нормальных напряжений в виде
Рис.4. Распределение нормальных напряжений
которая была впервые получена Ш. Кулоном в 1773 году. Для согласования знаков изгибающего момента Мх и нормальных напряжений в правой части формулы (5) ставится знак минус, так как при Mх>0 нормальные напряжения при y>0 оказываются сжимающими. Однако в практических расчетах удобнее, не придерживаясь формального правила знаков, определять напряжения по модулю, а знак ставить по смыслу. Нормальные напряжения при чистом изгибе призматического стержня являются линейной функцией координаты у и достигают наибольших значений в волокнах, наиболее удаленных от нейтральной оси (рис. 4), т. е.
Здесь введена геометрическая характеристика , имеющая размерность м 3 и получившая название момента сопротивления при изгибе. Поскольку при заданном Mх напряжения max ? тем меньше, чем больше Wx, момент сопротивления является геометрической характеристикой прочности поперечного сечения изгибе. Приведем примеры вычисления моментов сопротивления для простейших форм поперечных сечений. Для прямоугольного поперечного сечения (рис. 5, а) имеем Jх=bh 3 /12,ymax = h/2 и Wx = Jx/ymax = bh 2 /6. Аналогично для круга (рис. 5,a Jx=d 4 /64, ymax=d/2) получаем Wx=d 3 /32, для кругового кольцевого сечения (рис. 5, в), у которого
Итак, максимальные нормальные напряжения в сечении с изгибающим моментом Mх определяются по формуле
Рис.5. Конфигурации поперечных сечений бруса
Этой формулой удобно пользоваться для расчета балок пластичного материала в упругой области, одинаково работающего на растяжение и сжатие. Поскольку знак напряжения в этом случае не имеет значения, напряжения вычисляются по модулю, и условие прочности при изгибе балки в форме призматического стержня получает вид
где max Mх—максимальное значение изгибающего момента (легко определяемое по его эпюре), — допускаемое напряжение на простое растяжение (сжатие). Напомним, что чистый изгиб балки сводится к растяжению и сжатию ее волокон (неравномерному в отличие от деформации растяжения (сжатия) призматического стержня, при котором ).
Рис.6. Модель изгиба хрупкого материала
При расчете балок из хрупких материалов следует различать наибольшие растягивающие max и наибольшие сжимающие напряжения (рис. 6.), которые также определяются по модулю непосредственно и сравниваются с допускаемыми напряжениями на растяжение и сжатие . Условие прочности в этом случае будет иметь вид:
Лекция № 20. Прямой поперечный изгиб стержня
При прямом поперечном изгибе в сечениях стержня возникает изгибающий момент Мх и поперечная сила Qy рис. 1), которые связаны с нормальными и касательными напряжениями
Рис.1. Связь усилий и напряжений
а) сосредоточенная сила, б) распределенная
Рис.2. Модели прямого поперечного изгиба:
Выведенная в случае чистого изгиба стержня формула для прямого поперечного изгиба, вообще говоря, неприменима, поскольку из-за сдвигов, вызываемых касательными напряжениями , происходит депланация поперечных сечении (отклонение от закона плоских сечений). Однако для балок с высотой сечения h
а) в местах приложения сосредоточенных сил. Под сосредоточенной силой напряжения поперечного взаимодействия могут быть достаточно велики и во много раз превышать продольные напряжения , убывая при этом, в соответствии с принципом Сен-Венана, по мере удаления от точки приложения силы;
б) в местах приложения распределенных нагрузок. Так, в случае, приведенном на рис. 2, б, напряжения от давления на верхние волокна балки . Сравнивая их с продольными напряжениями , имеющими порядок
приходим к выводу, что напряжения при условии, что h 2 l 2 , так как .
Получим формулу для касательных напряжений . Примем, методика расчета нормальных напряжений известна, что касательные напряжения равномерно распределены по ширине поперечного сечения (рис. 3). Эта предпосылка выполняется тем точнее, чем уже поперечное сечение стержня. Точное решение задачи для прямоугольного поперечного сечения показывает, что отклонение от равномерного распределения , зависит от отношения сторон b/h. При (b/h) =1,0 оно составляет 12,6%, при (b/h) =0,5 — только 3,3%.
Рис.3. Расчетная модель поперечного прямого изгиба
Непосредственное определение напряжений затруднительно, поэтому находим равные им (вследствие закона парности) касательные напряжения , возникающие на продольной площадке с координатой у элемента длиной dz, вырезанного из балки, (рис. 3). Сам элемент показан на рис. 4. От этого элемента продольным сечением, отстоящим от нейтрального слоя на у, отсекаем верхнюю часть, заменяя действие отброшенной нижней части касательными напряжениями (индекс гу в дальнейшем опускаем), равнодействующая которых показана на рис. 5. Здесь, согласно второй предпосылке
Рис.4. Расчетный элемент бруса
Рис.5. Фрагмент расчетного элемента бруса
по ширине элемента b. Нормальные напряжения и , действующие на торцевых площадках элемента, также заменим их равнодействующими
Согласно первой предпосылке нормальные напряжения определяются уже известным способом, , где —статический момент отсеченной части площади поперечного сечения относительно осиОх.
Рассмотрим условие равновесия элемента (рис. 5) составив для него уравнение статики :
откуда после несложных преобразований, учитывая, что
получаем формулу для касательных напряжений при нормальном поперечном изгибе призматического стержня которая называется формулой Журавского.
Рис.6. Распределение касательных напряжений по контуру прямоугольного сечения
В этой формуле by — ширина сечения в том месте, где определяются касательные напряжения, а статический момент, подставляемый в эту формулу, может быть вычислен как для верхней, так и для нижней части (статические моменты этих частей сечения относительно его центральной оси Ох отличаются только знаком, так как статическим момент всего сечения равен нулю).
В качестве примера применения формулы Журавского построим эпюру касательных напряжений для случая прямоугольного поперечного сечения балки (рис. 6.). Учитывая, что для этого сечения
где F=bh—площадь прямоугольника.
Как видно из формулы, касательные напряжения по высоте сечения меняются по закону квадратичеокой параболы, достигая максимума на нейтральной оси
Сделаем несколько замечаний, касающихся расчетов на прочность при прямом поперечном изгибе. В отличие от простых видов деформации, когда в поперечных сечениях стержня возникает лишь один силовой фактор, к которым относятся и изученные выше растяжение (сжатие) и чистый изгиб, прямой поперечный изгиб должен быть отнесен к сложным видам деформации. В поперечных сечениях стержня при поперечном изгибе возникают два силовых фактора: изгибающий момент Мх и поперечная сила Qy (рис. 7), напряженное состояние является упрощенным плоским, при котором в окрестности произвольно выбранных точек поперечного сечения действуют нормальные и касательные напряжения. Поэтому условие прочности для таких точек должно быть сформулировано на основе какого-либо уже известного критерия прочности.
Однако учитывая, что наибольшие нормальные напряжения возникают в крайних волокнах, где касательные напряжения отсутствуют (рис. 7), а наибольшие касательные напряжения во многих случаях имеют место в нейтральном слое, где нормальные напряжения равны нулю, условия прочности в этих случаях формулируются раздельно по нормальным и касательным напряжениям
Рис.7 Распределение нормальных и касательных напряжений по контуру сечения
Рис.8. К сравнительной оценке модулей напряжения
Покажем, что доминирующая роль в расчетах на прочность балки, подвергнутой поперечному изгибу, будет принадлежать расчету по нормальным напряжениям. Для этого оценим порядок max и max на примере консольной балки, показанной на рис. 8:
Рассмотрим материальную точку массой m, которая находится на расстоянии r, от неподвижной оси (рис. 26). Моментом инерции J материальной точки относительно оси называется скалярная физическая величина, равная произведению массы m на квадрат расстояния r до этой оси:
Момент инерции системы N материальных точек будет равен сумме моментов инерции отдельных точек:

(76)

Рис. 26.
К определению момента инерции точки.
Если масса распределена в пространстве непрерывно, то суммирование заменяется интегрированием. Тело разбивается на элементарные объемы dv, каждый из которых обладает массой dm.
В результате получается следующее выражение:

(77)
Для однородного по объему тела плотность ρ постоянна, и записав элементарную массу в виде:
dm = ρdv, преобразуем формулу (70) следующим образом:

(78)
Размерность момента инерции – кг*м 2 .
Момент инерции тела является мерой инертности тела во вращательном движении, подобно тому, как масса тела является мерой его инертности при поступательном движении.
Момент инерции — это мера инертных свойств твердого тела при вращательном движении, зависящая от распределения массы относительно оси вращения. Иными словами, момент инерции зависит от массы, формы, размеров тела и положения оси вращения.
Всякое тело, независимо от того, вращается оно или покоится, обладает моментом инерции относительно любой оси, подобно тому, как тело обладает массой независимо от того, движется оно или находиться в покое. Аналогично массе момент инерции является величиной аддитивной.
В некоторых случаях теоретический расчёт момента инерции достаточно прост. Ниже приведены моменты инерции некоторых сплошных тел правильной геометрической формы относительно оси, проходящей через центр тяжести.
Момент инерции бесконечно плоского диска радиуса R относительно оси, перпендикулярной плоскости диска:

Момент инерции шара радиуса R:

Момент инерции стержня длиной L относительно оси, проходящей через середину стержня перпендикулярно ему:

Момент инерции бесконечно тонкого обруча радиуса R относительно оси, перпендикулярной его плоскости:

Момент инерции тела относительно произвольной оси рассчитывается с помощью теоремы Штейнера:
Момент инерции тела относительно произвольной оси равен сумме момента инерции относительно оси, проходящей через центр масс параллельно данной, и произведения массы тела на квадрат расстояния между осями.
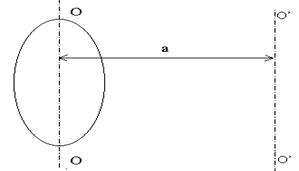
Рассчитаем при помощи теоремы Штейнера момент инерции стержня длиной L относительно оси, проходящей через конец перпендикулярно ему (рис. 27).

К расчету момента инерции стержня
Согласно теореме Штейнера, момент инерции стержня относительно оси O′O′ равен моменту инерции относительно оси OO плюс md 2 . Отсюда получаем:

Очевидно: момент инерции неодинаков относительно разных осей, и поэтому, решая задачи на динамику вращательного движения, момент инерции тела относительно интересующей нас оси каждый раз приходится искать отдельно. Так, например, при конструировании технических устройств, содержащих вращающиеся детали (на железнодорожном транспорте, в самолетостроении, электротехнике и т. д.), требуется знание величин моментов инерции этих деталей. При сложной форме тела теоретический расчет его момента инерции может оказаться трудно выполнимым. В этих случаях предпочитают измерить момент инерции нестандартной детали опытным путем.
Единица измерения СИ: кг·м². Обозначение: I или J.
Момент инерции тела относительно оси вращения зависит от массы тела и от распределения этой массы относительно этой оси. Чем больше масса тела и чем дальше она отстоит от воображаемой оси, тем большим моментом инерции обладает тело.
Момент инерции элементарной (точечной) массы mi, отстоящей от оси на расстоянии ri, равен:
mi — масса i-й точки,
ri — расстояние от i-й точки до оси.
— масса малого элемента объёма тела ,
— расстояние от элемента до оси a.
Если тело однородно, то есть его плотность всюду одинакова, то
| Моменты инерции однородных тел простейшей формы относительно некоторых осей вращения | |||
| Тело | Описание | Положение оси a | Момент инерции Ja |
 | Материальная точка массы m | На расстоянии r от точки, неподвижная | |
 | Полый тонкостенный цилиндр или кольцо радиуса r и массы m | Ось цилиндра | |
 | Сплошной цилиндр или диск радиуса r и массы m | Ось цилиндра | |
| Полый толстостенный цилиндр массы m с внешним радиусом r2 и внутренним радиусом r1 | Ось цилиндра | ||
| Прямой тонкий стержень длины l и массы m | Ось перпендикулярна к стержню и проходит через его центр масс | ||
| Прямой тонкий стержень длины l и массы m | Ось перпендикулярна к стержню и проходит через его конец | ||
 | Тонкостенная сфера радиуса r и массы m | Ось проходит через центр сферы | |
| Шар радиуса r и массы m | Ось проходит через центр шара |
Момент инерции твёрдого тела относительно какой-либо оси зависит не только от массы, формы и размеров тела, но также от положения тела по отношению к этой оси. Согласно теореме Штейнера (теореме Гюйгенса-Штейнера), момент инерции тела J относительно произвольной оси равен сумме момента инерции этого тела Jc относительно оси, проходящей через центр масс тела параллельно рассматриваемой оси, и произведения массы тела m на квадрат расстояния а между осями:
J = Jc + ma 2 .
где — полная масса тела (рис. 3).
Например, момент инерции стержня относительно оси, проходящей через его конец, равен:
Момент инерции тела относительно оси вращения является мерой инертности вращающегося тела.
Момент инерции тела, которое можно представить в виде совокупности дискретных частиц, относительно оси вращения равен:
где – масса i-ой материальной точки тела; – расстояние от материальной точки i до оси вращения. При рассмотрении твердого тела как сплошной среды с непрерывным распределением массы определение момента инерции заменяют следующим:
![\[J=\int_V{r^2dm=}\int_V{r^2\rho dV} \qquad (2)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-68b497f0a530ca18daaa875a3d3f119d_l3.jpg)
где – элемент массы тела; – плотность тела; – элементарный объем.
Момент инерции однородного диска
Рассмотрим, как находится момент инерции однородного диска, если его радиус равен R, а масса m. Ось вращения пусть проходит через центр инерции данного диска (точку О) и будет перпендикулярна его плоскости (рис.1).

Диск можно заменить совокупностью бесконечно тонких колец, радиусы которых изменяются от нуля до R. На рис.1 выделено одно из таких колец. Рассмотрим это кольцо. Радиус его обозначим как Момент инерции данного кольца (обозначим его равен (см. формулу момента инерции тонкого кольца):
Массу данного кольца (а точнее цилиндра) можно представить как:
где – высота цилиндра. Подставим выражение для в формулу (3) и проведем интегрирование:
![\[J=\int^R_0{dJ}=\int^R_0{\rho 2\pi rdrr^2dz}=2\pi \rho dz\int^R_0{r^3dr}=2\pi \rho dz{\left.\frac{r^4}{4}\right|}^R_0=\frac{\pi \rho dzR^4}{2}=\frac{mR^2}{2}\ \qquad(5)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-2ed4382334ef4506ee3831a66d2b44c0_l3.jpg)
где – масса диска.
Если диск можно считать абсолютно тонким или он является частью цилиндра, то формула для вычисления момента инерции диска относительно оси, проходящей через его центр масс, и перпендикулярной плоскости диска, имеет вид:
В случае плоского распределения масс выполняется равенство:
где оси вращения совпадают с осями декартово системы координат. И если мы будем считать, что ось Z проходит через центр инерции диска и перпендикулярна его плоскости, то моменты инерции относительно осе X и Y будут равны:
![\[J_x=J_y=\frac{1}{4}mR^2 \qquad(7)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-71986db58687e972d611c71215c82741_l3.jpg)
Иногда величины моментов инерции называют моментами инерции диска относительно его диаметров.
| Задание | Радиус однородного диска равен R, его масса m. Каков момент инерции диска относительно оси, которая проходит через середину одного из радиусов диска, перпендикулярно его плоскости? |
| Решение | Момент инерции диска относительно оси, проходящей через его центр масс, и перпендикулярной плоскости диска, имеет равен: |
Ось вокруг, которой происходит вращение нашего диска, параллельна основной, и сдвинута от нее на расстояние . Для такой ситуации подходит теорема Штейнера:
Подставим из (1.1) и учтем расстояние между осями, получим:
![\[J=\frac{mR^2}{2}+m{\left(\frac{R}{2}\right)}^2=\frac{3}{4}mR^2\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-1ababfb3ed64c46418c751fab662a260_l3.jpg)

где — момент инерции диска. Найдем момент инерции вырезки ( ). Используем теорему Штейнера:
![\[J_{v} =J_{v0}+m_vd^2=\frac{m_vr^2}{2}+m_vd^2 \qquad(2.3)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-45f884cdd102b935cee70d7933a46726_l3.jpg)
где ; – масса вырезанной части диска. Подставим выражение (2.3) в формулу (2.1), имеем:
Читайте также: