
Тахометр индуктивный принцип работы
Тахогенератор такого прибора (рисунок 6) представляет собой электрическую машину асинхронного типа, состоящую из внешнего 1 и внутреннего 2магнитопроводов, в зазоре между которыми располагаются статорная обмотка 3 (состоящая из обмотки возбуждения и сигнальной обмотки) и алюминиевый тонкостенный ротор 4, выполненный в виде цилиндра. Оси обмоток (катушек) возбуждения и сигнальной взаимно перпендикулярны.
К обмотке возбуждения подводится переменное UП напряжение частотой 1 кГц, а с сигнальной обмотки снимается напряжение Uc той же частоты, амплитуда которого пропорциональна угловой скорости вращения полого ротора. При неподвижном роторе и полной электрической и магнитной симметрии статора напряжение в сигнальной обмотке не индуктируется.
При вращений ротора с угловой скоростью в сигнальной обмотке индуктируется напряжении
U=kBщ f sin(nf t) (7)
где f - частота питающего напряжения (f=400 Гц);
В - магнитная индукция, создаваемая в зазоре питающим напряжением.
Таким образом, в деталей. Он удобен с точки зрения взаимозаменяемости и ремонта. Преобразователь данного типа можно выполнить в закрытом исполнении, что позволяет использовать его в неблагоприятных условиях. Еще одним преимуществом данного преобразователя является жесткое скрепление его вала с валом объекта, частоту вращения которого необходимо. Его конструкция позволяет использование как в лабораторных условиях, так и на производстве, рассматриваемом тахометре напряжение несущей частоты f модулируется измеряемой угловой скоростью. Для измерения угловой скорости необходимо осуществить демодуляцию сигнала Uc и подать демодулированное напряжение на измеритель.
Поскольку принцип действия индукционного тахометра основан на наведении питающим напряжением в роторе вихревых токов, которые в свою очередь наводят ЭДС в сигнальной обмотке, то погрешности прибора вызываются непостоянством амплитуды и частоты питающего напряжения, непостоянством сопротивления ротора для вихревых токов, непостоянством нагрузки.
Для уменьшения погрешностей от непостоянства UП и f можно применить схемы стабилизации этих величин. Стабилизация сопротивления ротора достигается путем выбора материала с малым температурным коэффициентом. Для устранения погрешности от непостоянства нагрузки должно быть удовлетворено условие работы тахогенератора в режиме холостого хода.

Рисунок 6. Принципиальная схема индукционного тахометра
Недостатки индукционного тахометра: необходимость в источнике питания, сложность изготовления, значительные погрешности.
Достоинства индукционного тахометра: дистанционность передачи выходного сигнала; у тахометра такого типа почти отсутствует «мертвая зона», в которой невозможно проводить измерения, поэтому его можно применять для измерения малых скоростей.

В промышленной электронике индуктивные, оптические и другие датчики применяются очень широко.
Долго и постоянно имею с ними дело, и вот решил написать статью, поделиться знаниями.
Статья будет обзорной (если хотите, научно-популярной). Приведены реальные инструкции к датчикам и ссылки на примеры.
Виды датчиков
Точнее можем посмотреть в Википедии: Датчик (сенсор, от англ. sensor) — понятие в системах управления, первичный преобразователь, элемент измерительного, сигнального, регулирующего или управляющего устройства системы, преобразующий контролируемую величину в удобный для использования сигнал.
Там же и много другой информации, но у меня своё, инженерно-электронно-прикладное, видение вопроса.
Датчиков бывает великое множество. Перечислю лишь те разновидности датчиков, с которыми приходится сталкиваться электрику и электронщику.
Емкостные. Срабатывает на наличие практически любого предмета или вещества в поле активности.
Концевые выключатели (электрический датчик). Это обычный пассивный выключатель, который срабатывает, когда на него наезжает или давит объект.
Датчики могут называться также сенсорами или инициаторами.
Пока хватит, перейдём к теме статьи.
Принцип работы индуктивного датчика
Индуктивный датчик является дискретным. Сигнал на его выходе появляется, когда в заданной зоне присутствует металл.
В основе работы датчика приближения лежит генератор с катушкой индуктивности. Отсюда и название. Когда в электромагнитном поле катушки появляется металл, это поле резко меняется, что влияет на работу схемы.

Поле индукционного датчика. Металлическая пластина меняет резонансную частоту колебательного контура

Схема индуктивного npn датчика. Приведена функциональная схема, на которой: генератор с колебательным контуром, пороговое устройство (компаратор), выходной транзистор NPN, защитные стабилитрон и диоды
Применение индуктивного датчика

Работа индуктивного датчика. Флажок движется вправо, и когда достигает зоны чувствительности датчика, датчик срабатывает.
Характеристики индуктивных датчиков
Чем отличаются датчики.
Почти всё, что сказано ниже, относится не только к индуктивным, но и к оптическим и ёмкостным датчикам.
Конструкция, вид корпуса
Диаметр цилиндрического датчика
Чтобы закрепить датчик 18 мм, нужны 2 ключа на 22 или 24 мм.
Расстояние переключения (рабочий зазор)
Количество проводов для подключения
Подбираемся к схемотехнике.
2-проводные. Датчик включается непосредственно в цепь нагрузки (например, катушка пускателя). Так же, как мы включаем дома свет. Удобны при монтаже, но капризны к нагрузке. Плохо работают и при большом, и при маленьком сопротивлении нагрузки.
2-проводный датчик. Схема включения
Виды выходов датчиков по полярности
У всех дискретных датчиков может быть только 3 вида выходов в зависимости от ключевого (выходного) элемента:
Релейный. Тут всё понятно. Реле коммутирует необходимое напряжение либо один из проводов питания. При этом обеспечивается полная гальваническая развязка от схемы питания датчика, что является основным достоинством такой схемы. То есть, независимо от напряжения питания датчика, можно включать/выключать нагрузку с любым напряжением. Используется в основном в крупногабаритных датчиках.
Можно чётко усвоить разницу, понимая принцип действия и схемы включения транзисторов. Поможет такое правило: Куда подключен эмиттер, тот провод и коммутируется. Другой провод подключен к нагрузке постоянно.
Ниже будут даны схемы включения датчиков, на которых будет хорошо видно эти отличия.
Виды датчиков по состоянию выхода (НЗ и НО)
- PNP NO
- PNP NC
- NPN NO
- NPN NC
Кстати, если Вам вообще интересно то, о чем я пишу, подписывайтесь на получение новых статей и вступайте в группу в ВК!
Положительная и отрицательная логика работы
Это понятие относится скорее к исполнительным устройствам, которые подключаются к датчикам (контроллеры, реле).
ОТРИЦАТЕЛЬНАЯ или ПОЛОЖИТЕЛЬНАЯ логика относится к уровню напряжения, который активизирует вход.
ПОЛОЖИТЕЛЬНАЯ логика: вход активизируется при подключении к +24 В=. Клемму контроллера S/S необходимо соединить с ЗЕМЛЕЙ. Используйте положительную логику для датчиков типа PNP. Положительная логика применяется чаще всего.
Существуют варианты различных устройств и подключения к ним датчиков, спрашивайте в комментариях, вместе подумаем.
• Autonics_proximity_sensor / Каталог датчиков приближения Autonics, pdf, 1.73 MB, скачан: 1646 раз./
• Omron_E2A / Каталог датчиков приближения Omron, pdf, 1.14 MB, скачан: 2153 раз./
• ТЕКО_Таблица взаимозаменяемости выключателей зарубежных производителей / Чем можно заменить датчики ТЕКО, pdf, 179.92 kB, скачан: 1649 раз./
• Turck_InduktivSens / Датчики фирмы Turck, pdf, 4.13 MB, скачан: 2192 раз./
• pnp npn / Схема включения датчиков по схемам PNP и NPN в программе Splan/ Исходный файл., rar, 2.18 kB, скачан: 3368 раз./
Индукционные тахогенераторы редко применяются как измерительные приборы вследствие больших погрешностей, но они незаменимы в качестве датчиков угловой скорости в системах автоматики.

Рис.8.5. Кинематические схемы магнитоиндукционных тахометров:
а – с полым цилиндром;б– с диском;1– чувствительный элемент;2–магнит;3– магнитопровод.
К ним относятся магнитоиндукционные тахометры, которые бывают двух типов: с чувствительным элементом в виде тонкостенного электропроводящего полого цилиндра 1 (рис.8.5,а), помещенного в зазоре между вращаемым магнитом 2 и магнитопроводом 3, или с чувствительным элементом в виде диска 1 (рис.8.5,б), помещенного в зазоре между вращаемыми цилиндрическими магнитами 2. Обычно постоянные магниты вращаются с частотой, пропорциональной измеряемой частоте вращения вала двигателя, а чувствительные элементы (цилиндры и диски) закреплены на самостоятельных осях и могут поворачиваться лишь на некоторый угол, ограниченный спиральной противодействующей пружиной П.
При вращении магнитной системы в теле чувствительного элемента (ЧЭ) за счет магнитной индукции наводится ЭДС, прямо пропорциональная скорости вращения магнита:
Е=k1nm, (8.7)
где k1 - коэффициент, зависящий от индукции магнитного потока, пронизывающего ЧЭ; пм — угловая скорость вращения магнита.
ЭДС, индуцированная в ЧЭ, вызывает появление в нем индукционных токов i, величина которых зависит от ЭДС, вызвавшей их, числа пар полюсов магнита, размеров и материалов ЧЭ. Индукционные токи, в свою очередь, создают магнитное поле. В результате взаимодействия магнитных полей ЧЭ и постоянных магнитов возникает вращающий момент, стремящийся повернуть ЧЭ вслед за вращающимся магнитом. Вращающий момент, действующий на элемент, пропорционален величине индуцированного в нем вихревого тока, а следовательно, и скорости вращения магнита:

(8.8)
где к2 — постоянный коэффициент пропорциональности.
Под действием вращающего момента ЧЭ поворачивается и закручивает пружину П, создающую противодействующий момент, пропорциональный углу закручивания пружины:
Мпр=с, (8.9)
где с - жесткость пружины; — угол закручивания пружины.
На одной оси с ЧЭ укреплена стрелка, угол отклонения которой пропорционален угловой скорости вращения постоянного магнита.
Угол поворота стрелки прибора определяется равенством моментов откуда
MВР=МПР к, (8.10)
где к=к2/с — коэффициент, зависящий от жесткости пружины, конструкции и материала магнита и ЧЭ.
На самолетах и вертолетах находят применение магнитоиндукционные тахометры типа ТЭ (ТЭ-15, 2ТЭ-15-1, ТЭ-5-2М и др.) со шкалой, отградуированной в оборотах в минуту, и типа ИТЭ (ИТЭ-1, ИТЭ-2 и др.) со шкалой, отградуированной в процентах. Разница в устройстве их незначительна.
В комплекты тахометров этого типа могут входить один-два датчика и один показывающий прибор, либо один датчик и один-два указателя. В частности, комплект тахометра может состоять из одного датчика ДТЭ-1 и одного показывающего прибора ИТЭ-1. Соответственно датчик ДТЭ-2, Д-ЗМ или Д-3-2 должен работать в системе измерения оборотов совместно с двумя измерителями типа ИТЭ-1 (ИТЭ-1Т) или с показывающим прибором ИТЭ-2 (ИТЭ-2Т), объединяющим в одном корпусе две измерительные системы.
Конструкция датчика Д-3-2 представлена на рис. 8.6.
Датчик представляет собой трехфазный генератор переменного тока с четырехполюсным постоянным магнитом - ротором 4.
Ротор напрессован на валу, заканчивающемся квадратным хвостовиком 1, которым вал генератора соединяется с приводом вала авиадвигателя. Эта передача обладает достаточной гибкостью.

Рис.8.6. Датчик магнитоиндукционного тахометра Д – 3 – 2:
1– хвостовик;2,6–крышки;3, 7– шарикоподшипники;4– ротор;5– статор;8– болт.
Она компенсирует скручивающие колебания и перекосы, которые могут возникнуть при монтаже датчика. Ротор вращается в шарикоподшипниках 3 и 7, которые установлены в крышках 2 и 6.
Статор 5 датчика набран из пластин электротехнической стали. В целях уменьшения потерь в статоре от вихревых токов пластины изолированы одна от другой клеем. Обмотка статора - трехфазная, выполнена из медного провода. Фазовые обмотки соединены звездой.
Магнитоиндукционный тахометр является дистанционным прибором. Синхронная дистанционная передача состоит из трехфазного генератора переменного тока (датчика), расположенного на авиадвигателе, трехпроводной линии и синхронного двигателя, размещенного в указателе. Электрокинематическая схема тахометра показана на рис.8.7.
Совместное рассмотрение рисунков 8.6-8.8 позволяет изучить конструкцию показывающего прибора и работу комплекта магнитоиндукционного тахометра типа ИТЭ в целом.
Показывающий прибор включает в себя два узла, смонтированные в одном корпусе, синхронный двигатель и измерительную систему (тахометр).

Рис. 8.7. Электрокинематическая схема тахометра:
1– плата с магнитами;2– диск демпфера;3– пружина;4– диск;5термомагнитный шунт;6– постоянные магниты; 7 – пружина;8– крестообразный магнит;9– гистерезисные диски;10– обмотка двигателя;11– дисковая плата;12 – ось;13– шала;14– стрелка;15– якорь;16 – обмотка статора.

Рис.8.8. Показывающий прибор тахометра ИТЭ – 1:
1– плата с магнитами;2– диск демпфера;3– пружина;4– диск;5– термомагнитный шунт;6– постоянные магниты; 7 – пружина;8– крестообразный магнит;9– гистерезисные диски;10 – обмотка двигателя;11– дисковая плата;12– ось;13– шкала;14–стрелка.
Синхронный двигатель состоит из статора с трехфазной обмоткой 10 и ротора, собранного из двух крестообразных магнитов 8 и трех гистерезисных дисков 9. Постоянные крестообразные магниты насажены на вал свободно и могут поворачиваться относительно вала на некоторый угол, так как соединяются с ним пружиной 7, через которую передают крутящий момент на вал синхронного двигателя.
Это обеспечивает вхождение двигателя в синхронизм до того момента, когда он разовьет полную мощность.
Гистерезисные диски 9 изготовляются из магнитотвердого материала. В синхронном режиме работы диски взаимодействуют с вращающимся полем так же, как и постоянные магниты, но с меньшей силой взаимодействия.
Измерительная часть прибора состоит из магнитного узла с двумя дисковыми платами 11 с впрессованными в них шестью парами постоянных магнитов 6. На магниты надет термомагнитный шунт 5, предназначенный для компенсации температурной погрешности. Шунт выполнен из сплава, магнитная проницаемость которого с возрастанием температуры уменьшается.
В воздушном зазоре между торцами противоположных полюсов магнитов расположен чувствительный элемент - диск 4, изготовленный из медно-марганцевого сплава с малым температурным коэффициентом.
Таким образом, магнитный узел укреплен на конце вала синхронного двигателя и вращается с синхронной скоростью, а чувствительный элемент - диск связан, через ось 12 со стрелкой 14, перемещающейся по шкале 13.
Для уменьшения колебаний стрелки около установившегося положения в конструкции прибора предусмотрен демпфер, по устройству аналогичный измерительному узлу 11.
Платы 1 магнитного демпфера закреплены неподвижно. Между торцами шести пар неподвижных магнитов находится алюминиевый диск 2 демпфера, связанный с осью измерительного узла.
Взаимодействие наводимых в алюминиевом диске вихревых токов с магнитным потоком магнитов приводит к превращению энергии колебаний в тепловую и к повышению устойчивости стрелки прибора.
Тахометр ИТЭ-1 работает следующим образом. Напряжение статорной обмотки 16 генератора датчика с частотой, пропорциональной частоте вращения ротора авиадвигателя, возбуждает в статорной обмотке 10 синхронного двигателя показывающего прибора вращающееся магнитное поле, которое приводит к намагничиванию гистерезисных дисков двигателя. Гистерезисные диски выполнены из ферромагнитного материала с большой коэрцитивной силой, поэтому создаваемое ими магнитное поле из-за большого гистерезиса отстает на некоторый угол от намагничивающего поля статора.
В результате возникает вращающий момент дисков ротора двигателя, направление которого совпадает с направлением вращающегося поля статорных обмоток.
При частоте вращения ротора, близкой к синхронной, когда обороты ротора и поля статора становятся одинаковыми, постоянные магниты 8 успевают взаимодействовать с полем статора, входят в синхронизм и, постепенно закручивая пружину 7, начинают воспринимать полную нагрузку. В синхронном режиме работы двигателя основной вращающий момент создается в результате взаимодействия поля постоянных магнитов с вращающимся полем статора, а гистерезисные диски создают лишь незначительный дополнительный момент.
При резких увеличениях частоты вращения авиадвигателя, следовательно, и скорости вращения магнитного поля статора возможен переход двигателя в асинхронный режим работы. В этом случае полюсы постоянных магнитов вращаются с некоторым отставанием от полюсов поля статора. Гистерезисные диски помогают ротору следовать за магнитным полем статора и вводят постоянные магниты ротора в синхронную работу.
Ротор двигателя вращает магнитную систему 11 измерительного узла. В результате взаимодействия полей магнитов 6 и диска 4 чувствительный элемент (диск) с закрепленной на его оси стрелкой 14 поворачивается и закручивает противодействующую пружину 3. Таким образом, угол поворота диска пропорционален значению измеряемой частоты вращения. Демпфер, укрепленный на оси чувствительного элемента, успокаивает подвижную систему и облегчает снятие показаний стрелки указателя.
Указатели ИТЭ-2 предназначены для измерения частоты вращения валов двух двигателей или двух ступеней компрессора одного двигателя. В корпусе указателя ИТЭ-2 размещены два измерительных узла, аналогичные рассмотренным, движение которых передается на две соосные стрелки. Магнитоиндукционный демпфер в них отсутствует. Демпфирование колебаний осуществляется за счет моментов трения зубчатых передач.
Шкала показывающего прибора ИТЭ отградуирована в процентах, измерительный предел - (0-110) %, цена деления -1%, погрешность измерения не превышает ±0,5% в рабочем диапазоне шкалы от 60 до 100% и 1% - в остальном диапазоне.
Датчики магнитоиндукционных тахометров не имеют методической погрешности.
Основная инструментальная погрешность указателя тахометра определяется трением в подшипниках и ошибками градуировки шкалы.
Дополнительные погрешности обусловлены прежде всего влиянием температуры и вызываются изменением электрического сопротивления чувствительного элемента, магнитной проводимости магнитопроводов и упругих свойств противодействующей пружины. Конструктивная погрешность из-за изменения температуры окружающей среды частично компенсируется подбором материалов деталей. В частности, чувствительный элемент - диск изготовляется из марганцовистой меди (96,1% Сu, 3,9% Мn) с положительным температурным коэффициентом. Противодействующая пружина из фосфористой бронзы и магниты из соответствующих сплавов имеют отрицательные температурные коэффициенты. Для компенсации остаточной температурной погрешности применяется температурный шунт 5, надетый на магниты 6. Шунт выполнен из сплава, магнитная проницаемость которого с возрастанием температуры уменьшается. Действие шунта заключается в следующем. С увеличением температуры окружающей среды увеличивается сопротивление токопроводящего диска 4 и уменьшается сила наведенного тока. Одновременно с этим уменьшается магнитная проницаемость шунта, который меньшую часть магнитного потока пропускает через себя, вследствие чего увеличивается магнитная индукция в зазоре измерительного магнитного узла. При этом сила взаимодействия постоянных магнитов 6 и токов в диске 4, а следовательно, и движущий момент практически остаются неизменными.

В зависимости от места установки тахометра и способа применения тахометры подразделяют на стационарные, дистанционные и ручные. По принципу действия, различают механические (центробежные), магнитные, магнитно-индукционные, электрические и электронные тахометры.
Механические тахометры
Принцип действия механических тахометров основан на использовании центробежных сил, пропорциональных квадрату угловой скорости, действующих на центробежные расходящиеся грузы (наклонное кольцо), находящиеся на валу и вращающиеся вместе с ним вокруг оси, (рис. 1, а). Чувствительным элементом является кольцо 1 на оси 2, проходящей через приводной валик 3. Кольцо нагружено спиральной пружиной 4 и связано тягой 5 с подвижной муфтой 6. При вращении валика кольцо стремится занять положение, перпендикулярное к оси вращения. Муфта через промежуточное кольцо 9 и зубчатую рейку 7 входит в зацепление с шестерней 10, на оси которой закреплена стрелка 8, движущаяся вдоль шкалы прибора (градуирована в об/мин.). Тахометр закреплен неподвижно, а вал 3 приводится во вращение через передачу от вала двигателя.

При установившемся режиме центробежная сила, действующая на вращающееся кольцо 1, уравновешивается силой действия спиральной пружины, и стрелка тахометра неподвижна. При изменении частоты вращения вала равновесие сил нарушается, вызывая разворот кольца относительно оси 2 на угол α и соответствующий разворот стрелки 8 прибора. Механические центробежные измерительные приборы обладают нелинейной статической характеристикой, поэтому их шкала неравномерная.
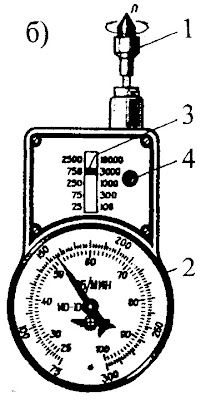
Периодический контроль частоты вращения и проверку стационарных тахометров производят механическим центробежным ручным тахометром (рис. 1, б), прижимая наконечник 1 к торцу вращающегося вала. В корпус 2 встроен редуктор с переключающим устройством, позволяющий менять передаточное отношение от наконечника 1 к чувствительному элементу для измерения в пяти диапазонах частоты вращения от 25 до 10000 об/мин. Переключают редуктор и устанавливают указатель 3 путем перемещения вдоль оси наконечника приводного вала при нажатой кнопке 4. В зависимости от установленного диапазона частоты вращения показания прибора определяют по одной из двух шкал.
К преимуществам механических тахометров относится высокая точность показаний, а к недостаткам - невозможность дистанционного отсчета.
Магнитоиндукционные тахометры
Магнитоиндукционный тахометр имеет равномерную шкалу. В тахометре (рис. 2.) вращение от приводного вала 1 через конические шестерни и вал 2 передается ротору с постоянными магнитами 3, между которыми на оси 10 находится алюминиевый диск 4.

Под действием вращающегося поля магнитов в диске индуцируется электрический ток, создающий свое магнитное поле. Сила взаимодействия магнитных полей уравновешивается силой действия волосковой пружины 5, один конец которой закреплен на оси 10, а другой - в корпусе прибора.
Пропорционально частоте вращения приводного вала 1 изменяются действующие силы, разворот диска 4, оси 10 и жестко связанной с ней стрелки 7 вдоль шкалы 8.
В прибор вмонтирован магнитоиндукционный успокоитель, состоящий из алюминиевого диска 9, закрепленного на валу 10, и неподвижной системы с постоянными магнитами 6. При движении в диске 9 индуцируется ток и создается магнитное поле, взаимодействующее с полем постоянных магнитов. А так как сила взаимодействия этих полей направлена в сторону, противоположную движению диска, то происходит торможение колебаний стрелки прибора.
Дистанционные магнитоиндукционные тахометры
Дистанционное измерение частоты вращения основано на принципе электрической дистанционной передачи вращения вала двигателя валу магнитно-индукционного измерительного узла измерителя и преобразования частоты вращения вала в угловые перемещения стрелки измерителя.

Тахометр работает следующим образом (рис. 3): в обмотке статора 11 датчика при вращении ротора 15 возбуждается трехфазовый ток с частотой, пропорциональной частоте вращения вала двигателя. Ток по трем проводам приводится к обмотке статора 12 синхронного серводвигателя.
Частота вращения магнитного поля статора измерителя пропорциональна частоте токов в обмотках фазы. Ротор двигателя измерителя вращается с частотой, синхронной вращению магнитного поля статора. На конце вала ротора двигателя укреплен магнитный узел 2 с шестью парами постоянных магнитов, между полюсами которых расположен чувствительный элемент 8. При вращении магнитного узла в чувствительном элементе индуцируются вихревые токи. В результате взаимодействия вихревых токов с магнитным полем магнитного узла создается вращающий момент чувствительного элемента. Вращающему моменту чувствительного элемента противодействует спиральная пружина 7, - один конец которой укреплен на оси чувствительного элемента, другой - неподвижен. Так как момент спиральной пружины пропорционален углу ее закручивания, то угол поворота чувствительного элемента пропорционален частоте вращения магнитного узла, и соответствует частоте вращения вала двигателя. На другом конце оси чувствительного элемента укреплена стрелка 5, показывающая по равномерной шкале 4 измерителя частоту вращения вала двигателя.
Для повышения устойчивости стрелки и улучшения отсчета показаний прибора применено демпфирование подвижной системы измерителя. При движении подвижной системы магнитный поток магнита 6 наводит в алюминиевом диске 3 вихревые токи, которые взаимодействуют с магнитным полем магнитов, и в подвижной системе возникает тормозящий момент. Ротор состоит из двух постоянных магнитов 13 и трех гистерезисных дисков 14, соединенных вместе. Взаимодействие ротора с магнитным полем статора - определяется взаимодействием магнитных полей постоянных магнитов статора и гистерезисных дисков.
Электрические тахометры
Электрические тахометры служат для дистанционного контроля направления и частоты вращения валов в диапазоне до 1500 об/мин. Датчиками в них служат тахогенераторы - миниатюрные генераторы переменного или постоянного тока, вырабатывающие напряжение, пропорциональное частоте вращения вала. Указателями являются магнитоэлектрические вольтметры со шкалой, градуированной в единицах частоты вращения.

Счетчики оборотов
Для суммирования числа оборотов вала двигателя или механизма применяют специальные счетчики оборотов. Упрощенная принципиальная схема дистанционного электромеханического счетчика представлена на рис. 5.
На валу 9 жестко закреплены храповое колесо 5 и цифровой барабан 7, а цифровые барабаны 6 свободно насажены на вал. Барабаны кинематически соединены между собой так, что при полном обороте каждого из них соседний слева разворачивается на 1/10 оборота. На каждый барабан нанесены цифры от 0 до 9. Таким образом обеспечивается десятичная система отсчета. Число читается в рамке прибора 8. Колесо 5 входит в зацепление с храповиком 3, который в одну сторону перемещается под действием пружины 4, а в другую - якорем 2 электромагнитной катушки 1. Катушка получает питание Uп от сети через герметичные контакты выключателя 13. В выключателе на пластинчатой пружине с контактом закреплен постоянный магнит 12. Выключатель крепится к корпусу двигателя таким образом, чтобы между якорем 12 и стальным штифтом 10 вала 11 был установлен зазор, обеспечивающий притягивание якоря и замыкание цепи питания катушки 1.

Широко распространены магнитоуправляемые контакты (герконы). Прибор представляет собой две тонкие пермалоевые пластины с небольшим зазором между концами, впаянные в стеклянную колбу, из которой выкачан воздух (в некоторых приборах колбу заполняют инертным газом). При появлении вблизи геркона магнитного поля постоянного или электрического магнита происходит взаимное притягивание (прогиб) пластин и замыкание контактов. Постоянный магнит крепится на вращающемся валу 11 вместо штифта 10.
При каждом обороте вала независимо от направления его вращения катушка 1, получив питание, втягивает якорь 2 и смещает храповик 3 на один зуб колеса 5. При обесточивании катушки храповик под действием пружины 4 смещается в первоначальное положение, разворачивает колесо 5, вал 9 и барабан 7 на 1/10 оборота, что приводит к изменению показаний счетчика на одну единицу. Через один оборот барабана 7 соседний барабан 6 разворачивается на 1/10 оборота, отсчитав 10 оборотов вала 11, и т. д.
Индукционные тахометры с генератором переменного тока свободны от недостатков, обусловленных наличием коллектора, ибо в них отвод тока к измерителю осуществляется от неподвижных обмоток. При этом такой генератор может быть использован двояким образом; либо в сочетании с вольтметром, либо в сочетании с герцметром; и в том и в другом случае показание прибора будет связано со скоростью вращения. [2]
Индукционные тахометры по виду напоминают асинхронные двухфазные двигатели, но в них возбуждается только одна фаза, а на другой, не возбужденной, выходной фазе развивается напряжение, с частотой питающей сети и по величине приблизительно пропорциональное скорости вращения вала. Обладая жесткостью и прочностью такой же, как и двигатели с короткозамкнутым ротором, тахометр с полым ротором может генерировать чистые сигналы высокой точности, свободные от радиочастотных помех и магнитно-пазовых пульсаций. [3]
Индукционные тахометры переменного тока , применяемые в системах регулирования, работающих на переменном токе. Эти агрегаты отличаются высокой точностью и большой надежностью. [4]
В индукционном тахометре , разработанном В. О. Арутюновым и Л. Л. Карасик, в качестве герцметра использован ферродинамический компенсационный логометр. Измерительная цепь герцметра изображена на фиг. F обозначены катушки возбуждения логометра, : s - рамка логометра, гг и хг-активное и реактивное сопротивления цепи рамки; индуктивность L включает в себя и индуктивность жатушек возбуждения логометра. [5]
В индукционном тахометре с постоянным магнитом NS ( рис. 8 - 42) последний механически связан с валом машины, частота вращения которой измеряется. При его вращении в алюминиевом диске 1, расположенном на одной оси со стрелкой 2, индуктируются вихревые токи. Взаимодействие этих токов; с полем постоянного магнита создает вращающий момент, вызывающий поворот диска и указательной стрелки на угол, при котором этот момент уравновешивается моментом пружины 3, На шкале тахометра наносятся деления, соответствующие различным частотам вращения. [7]
Магнитные или индукционные тахометры основаны на действии вращающегося магнитного поля на размещаемый в нем немагнитный цилиндрик. [9]
Существенными недостатками индукционных тахометров являются зависимость показаний от температуры и изменение чувствительности с течением времени, вследствие изменения индукции магнита. Последнее происходит главным образом в результате сотрясений, поэтому индукционные тахометры следует применять в условиях, исключающих тряску. [10]
Наиболее широко распространены центробежные и индукционные тахометры . [12]
Сельсины, двухфазные двигатели и индукционные тахометры , применяемые в системах с несущей частотой, просты по конструкции, прочны и надежны. Они не требуют коммутаторов. Использование высокой несущей частоты позволяет уменьшить габариты системы, обеспечивая тем самым повышение мощности на единицу веса. [13]
На рис. 12 - 78 схематически изображен индукционный тахометр . Возбуждение подается на первичную обмотку статора. Вторичная обмотка смещена на 90 по отношению к первичной и в ней развивается выходное напряжение. Токи на стержнях, наводимые вращением, находятся в фазе с генерируемым напряжением, и ротор возбуждает магнитный поток вдоль вторичной оси. Если первичный магнитный поток пульсирует синусоидально, во вторичной обмотке генерируется синусоидальное напряжение той же частоты, совпадающее по фазе и пропорциональное скорости вращения. Не учитывавшиеся в приведенном рассмотрении реактивность рассеяния и сопротивление утечки статора, а также индуктивность обмотки ротора отклоняют практические характеристики работы тахометра от идеальных характеристик, так как эти факторы вносят нелинейность и сдвиг фазы при увеличении скорости генератора. [15]
Читайте также: