
Магнитоиндукционный тахометр принцип работы
Описание
Тахометры (рис. 45 и 46) предназначены для непрерывного измерения частоты вращения валов машин и механизмов. Применяются в моторостроении, станкостроении и других областях народного хозяйства.
Рис. 45. Тахометр типа ТМ, подсоединяемый к объекту измерения с помощью муфты
Принцип действия магнитоиндукционного тахометра основан на взаимодействии магнитного поля вращающихся постоянных магнитов с индукционными токами, наведенными этим полем в металлическом диске. В результате этого взаимодействия возникает вращающий момент диска (связанного со стрелкой), пропорциональный числу оборотов в минуту вращающихся магнитов, уравновешиваемый противодействующей пружиной.
Тахометр состоит из измерительного механизма и привода, смонтированных в корпусе. При вращении вала // (рис. 47) через конические шестерни 10 и I
Рис. 46. Тахометр типа ТМ, подсоединяемый к объекту измерения с помощью гибкого вала
нижнюю плату запрессованы магниты. Между торцами магнитов и верхней платой расположен алюминиевый диск 3, укрепленный на оси подвижной системы.
Тахометры выполняются с диаметрами циферблатов 80 или 125 мм. Тахометры с диаметром циферблата 80 мм выпускаются с односторонней шкалой левого или правого вращения приводного вала. Тахометры с диаметром циферблата 125 мм выпускаются с односторонней шкалой левого или правого вращения приводного вала или с двухсторонней шкалой. Относительно циферблата приводной вал тахометра имеет следующее расположение: снизу, сверху, справа, слева.
Технические характеристики
Класс точности 1,0. Пределы и диапазоны измерений указаны в табл. 11.
Масса тахометра: с диаметром циферблата 80 мм 1,1 кг; с диаметром циферблата 125 мм 1,4 кг; с амортизатором (без учета массы гибкого вала) 1,6 кг. Габаритные и монтажные размеры тахометров приведены на рис. 48 и 49.
Вероятность безотказной работы в течение 2000 ч составляет 0,94.
Тахометры предназначены для работы при температуре окружающего воздуха -60. +60°С и относительной влажности до 80%; в тропическом исполнении-при относительной влажности до 95% при 40°С.
Тахометры устойчивы к воздействию вибрации с ускорением до 20 м/с 2 в диапазоне частот 5 . 80 Гц.
Рис. 47. Принципиальная схема тахометра типа ТМ
Вращающему моменту чувствительного элемента противодействует момент спиральной пружины 5, укрепленной на оси 6 чувствительного элемента. На другом конце оси стрелка 5, показывающая по равномерной шкале 4 число оборотов вала объекта.
Для повышения устойчивости стрелки и улучшения отсчета показаний применено демпфирование подвижной системы тахометра. Демпфер 7 представляет собой магнитный узел, состоящий из двух плат, в
Рис. 48. Габаритно-монтажный чертеж тахометра, подсоединяемого к объекту измерения с помощью пружинной муфты:
| Д1. мм | Дг, мм | Дз, мм | li, MM | lj, MM |
| 101, 145 | 25 | g+0,2 | 77 | 30 |
| 40 | 12+0,2 | 112 | 40 |
В комплект поставки входят: тахометр, гибкий вал (только для тахометров, подсоединяемых к объекту
| Типоразме | Пределы | Рабочий ди | апазон из- | Коэффици |
| ры тахо | измерений, | мерения, | об/мин | ент тахо |
| метра | об/мин | метра | ||
| нижний | верхний | |||
| ТМ0.5 | 25 . 500 | 150 | 500 | 2:1; 4:1 |
| ТМО,75 | 40. 750 | 250 | 750 | 2:1; 4:1 |
| ТМ 1 | 50. 1000 | 300 | 1000 | 1:1; 2:1 |
| ТМ1,5 | 75. 1500 | 450 | 1500 | 1:1; 2:1 |
| ТМ2 | 100 . 2000 | 600 | 2000 | 1:1; 1:2 |
| ТМЗ | 150 . 3000 | 900 | 3000 | 1:1 |
| ТМ4 | 200 . 4000 | 1200 | 4000 | 1:1; 1:2; 1:4 |
| ТМ6 | 300 . 6000 | 1800 | 6000 | 1:3 |
| ТМ8 | 400 . 8000 | 2400 | 8000 | 1:4 |
| ТМ12 | 600 . | 3600 | 12000 | 1:6 |
| 12000 | ||||
| ТМ 16 | 800 . | 4800 | 16000 | 1:8 |
| 16000 | ||||
| ТМ 2,5 | 125. 2500 | 750 | 2500 | 1:1 |
Примечания. Шкала тахометра ТМ 2,5 отградуирована в процентах. 2. Под коэффициентом тахометра понимается отношение значения входной частоты вращения к значению частоты, показываемой тахометром.
Действие магнитоиндукционных тахометров основано на измерении сил, возникающих в результате взаимодействия вращающегося магнитного поля с индукционными токами, наведенными этим полем в сплошном металлическом роторе.
Вращающееся магнитное поле создается намагниченным по диаметру постоянным магнитом 1, вращающимся вместе с валом 5, частота вращения которого измеряется. Расположенный во вращающемся магнитном поле чувствительный элемент 2 в виде тонкостенного металлического цилиндра укреплен на отдельной оси, сосной с осью магнитной системы, и удерживается от вращения спиральной пружиной 3.
Взаимодействуя с магнитным полем, этот ток создает вращающий момент, пропорциональный скорости вращения магнита и стремящийся увлечь цилиндр вслед за вращающейся магнитной системой.
Под действием вращающего момента цилиндр поворачивается и закручивает спиральную пружину 3, которая создает противодействующий момент, пропорциональный углу закручивания. Угол отклонения стрелки 4 будет пропорционален угловой скорости постоянного магнита.
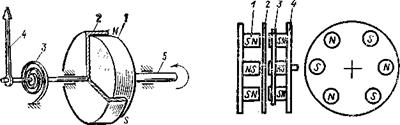
Принципиальная схема магнитоиндукционного тахометра
Постоянный магнит обычно выполняют многополюсным, причем для увеличения магнитной индукции вокруг цилиндра 2 располагают магнитный экран, вращающийся вместе с магнитом (на рисунке не показан). Цилиндр чувствительного элемента часто выполняют в виде металлического диска.
Магнитоиндукционные тахометры выполняют дистанционными, соединив
тахометр электрической дистанционной передачей с валом, частоту вращения которого нужно измерить.
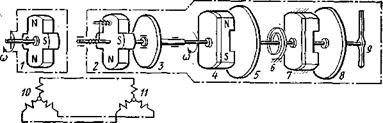
Схема дистанционного магнитоиндукционного тахометра:
1 — магнит генератора; 2 — магнит-ротор синхронного двигателя; 3 — гистерезисный диск; 4 — постоянный магнит; 5 — диск ЧЭ; 6 — противодействующая пружина; 7 — магнит демпфера; 8 — диск демпфера; 9 — стрелка; 10 — обмотка генератора; 11 — статорная обмотка синхронного электродвигателя
Датчиком тахометра служит синхронный генератор с ротором в виде постоянного магнита. В статорной обмотке 11 синхронного двигателя указателя создается вращающееся магнитное поле, вызывающее вращение ротора, состоящего из постоянного магнита 2 и гистерезисного диска 3, посаженного на общий вал. Этот диск выполняет роль «беличьего колеса» и служит для асинхронного запуска синхронного двигателя. Диск 3 приводит вал ротора во вращение со скоростью, близкой к синхронной, после чего постоянный магнит входит в синхронизм и обеспечивает синхронную работу двигателя.
Постоянный магнит 2 свободно помещен на валу и соединен с ним пружиной, через которую передает вращение валу синхронного двигателя указателя. Благодаря этому магнит может свободно сделать один оборот и только в конце этого оборота передать вращение валу двигателя. Это дает возможность двигателю войти в синхронный режим еще до того, как он воспримет на себя полную нагрузку.
На конце вала синхронного двигателя укреплен магнитный узел, состоящий из двух плат с запрессованными в них цилиндрическими магнитами. На схеме условно показан двухполюсный магнит 4.
Чувствительный элемент в виде диска 5 находится в воздушном зазоре магнитного узла. Пружина 6 создает противодействующий момент.
Для устранения колебаний стрелки в приборе имеется демпфирующее устройство, состоящее из неподвижного магнитного узла 7, аналогичного магнитному узлу 4, и металлического диска 8, укрепленного на оси стрелки.
Индукционные тахогенераторы редко применяются как измерительные приборы вследствие больших погрешностей, но они незаменимы в качестве датчиков угловой скорости в системах автоматики.

Рис. 6. Кинематические схемы магнитоиндукционных тахометров: а – с полым цилиндром; б – с диском; 1 – чувствительный элемент; 2 –магнит; 3 – магнитопровод.
К ним относятся магнитоиндукционные тахометры, которые бывают двух типов: с чувствительным элементом в виде тонкостенного электропроводящего полого цилиндра 1 (рис. 6. а), помещенного в зазоре между вращаемым магнитом 2 и магнитопроводом 3, или с чувствительным элементом в виде диска 1 (рис. 6. б), помещенного в зазоре между вращаемыми цилиндрическими магнитами 2. Обычно постоянные магниты вращаются с частотой, пропорциональной измеряемой частоте вращения вала двигателя, а чувствительные элементы (цилиндры и диски) закреплены на самостоятельных осях и могут поворачиваться лишь на некоторый угол, ограниченный спиральной противодействующей пружиной П.
При вращении магнитной системы в теле чувствительного элемента (ЧЭ) за счет магнитной индукции наводится ЭДС, прямо пропорциональная скорости вращения магнита:
где k1 - коэффициент, зависящий от индукции магнитного потока, пронизывающего ЧЭ; пм — угловая скорость вращения магнита.
ЭДС, индуцированная в ЧЭ, вызывает появление в нем индукционных токов i, величина которых зависит от ЭДС, вызвавшей их, числа пар полюсов магнита, размеров и материалов ЧЭ. Индукционные токи, в свою очередь, создают магнитное поле. В результате взаимодействия магнитных полей ЧЭ и постоянных магнитов возникает вращающий момент, стремящийся повернуть ЧЭ вслед за вращающимся магнитом. Вращающий момент, действующий на элемент, пропорционален величине индуцированного в нем вихревого тока, а следовательно, и скорости вращения магнита:
где к2 — постоянный коэффициент пропорциональности.
Под действием вращающего момента ЧЭ поворачивается и закручивает пружину П, создающую противодействующий момент, пропорциональный углу закручивания пружины:
где с - жесткость пружины; a — угол закручивания пружины.
На одной оси с ЧЭ укреплена стрелка, угол отклонения которой пропорционален угловой скорости вращения постоянного магнита.
Угол поворота стрелки прибора определяется равенством моментов откуда
где к=к2/с — коэффициент, зависящий от жесткости пружины, конструкции и материала магнита и ЧЭ.
Магнитоиндукционный тахометр является дистанционным прибором. Синхронная дистанционная передача состоит из трехфазного генератора переменного тока (датчика), расположенного на авиадвигателе, трехпроводной линии и синхронного двигателя, размещенного в указателе.
Датчики магнитоиндукционных тахометров не имеют методической погрешности.
Основная инструментальная погрешность указателя тахометра определяется трением в подшипниках и ошибками градуировки шкалы.
Дополнительные погрешности обусловлены прежде всего влиянием температуры и вызываются изменением электрического сопротивления чувствительного элемента, магнитной проводимости магнитопроводов и упругих свойств противодействующей пружины. Конструктивная погрешность из-за изменения температуры окружающей среды частично компенсируется подбором материалов деталей.
Акселерометры
Для измерений ускорений и перегрузок, воздействующие на отдельные элементы и на весь ЛА в целом, используются акселерометры. Знание перегрузок необходимо для управления самолетом. Акселерометры могут измерять линейные и угловые ускорения и перегрузки. Ускорения, воздействующие на ЛА могут измеряться относительно осей, связанных с центром масс ЛА и относительно осей связанных с Земной поверхностью. Ускорение можно определить следующими медодами: 1)инерциальным;2)дифференцированием известных скоростей;3)двойным дифференцированием перемещений.
Линейное и угловое перемещения могут быть определены с помощью: реостатного, индуктивного и емкостного преобразователей перемещений.
Акселерометры могут быть реализованы с применением схем прямого преобразования, компенсационных схем. Необходимо иметь 3 угловых и 3 линейных акселерометра по 3 осям координат.
Тахометр – прибор для измерения угловой или линейной скорости вращающихся или движущихся частей машин и механизмов. Тахометры широко применяются в системах, где необходимо контролировать скорость вращения
Магнитоиндукционные тахометры очень просты и надежны в эксплуатации. Они содержат очень мало деталей.
Магнитоиндукционные тахометры бывают двух типов: с цилиндрическим чувствительным элементомЧЭ (рис.2 а) и с дисковым ЧЭ (рис. 2 б).
Рис. 2 а – тахометр с полым цилиндром; б – тахометр с диском; 1 – магнит; 2 – чувствительный элемент; 3 – термомагнитный шунт; 4 – магнитопровод.
Рис.2,б 15.16. Магнитоиндукционный тахометр:1 — катушка индуктивности; 2 — статор; 3 — изоляция; 4 — подшипник; 5 — алюминиевая чашка; 6 — вал привода; I — напряжение питания переменного тока; II — напряжение на
Индукционные тахометры
Индукционные тахогенераторы редко применяются как измерительные приборы вследствие больших погрешностей, но они незаменимы в качестве датчиков угловой скорости в системах автоматики. К ним относятся магнитоиндукционные тахометры, которые бывают двух типов: с чувствительным элементом в виде тонкостенного электропроводящего полого цилиндра 1 (рис. 6. а), помещенного в зазоре между вращаемым магнитом 2 и магнитопроводом 3, или с чувствительным элементом в виде диска 1 (рис. 6. б), помещенного в зазоре между вращаемыми цилиндрическими магнитами 2. Обычно постоянные магниты вращаются с частотой, пропорциональной измеряемой частоте вращения вала двигателя, а чувствительные элементы (цилиндры и диски) закреплены на самостоятельных осях и могут поворачиваться лишь на некоторый угол, ограниченный спиральной противодействующей пружиной П.
Рис. 6 Кинематические схемы магнитоиндукционных тахометров:а – с полым цилиндром; б – с диском; 1 – чувствительный элемент; 2 –магнит; 3 – магнитопровод.При вращении магнитной системы в теле чувствительного элемента (ЧЭ) за счет магнитной индукции наводится ЭДС, прямо пропорциональная скорости вращения магнита:Е=k1nm, (3.1)где k1 - коэффициент, зависящий от индукции магнитного потока, пронизывающего ЧЭ; пм — угловая скорость вращения магнита.
Электрические тахометры постоянного тока (рис. 3) включают тахогенератор постоянного тока и гальванометр. Тахогенераторы бывают двух типов: с ограниченным (рис.3 а) и неограниченным (рис.3 б) углом поворота ротора.
Рис. 3 а – тахогенератор ; б – тахометр постоянного тока: 1 – магниты; 2 – обмотка якоря; 3 – коллектор.Тахогенератор с ограниченным углом поворота выполняется с неподвижной статорной обмоткой, внутри которой помещается постоянный магнит, связанный с валом, скорость вращения которого контролируется.Тахогенераторы подобного типа применяются в качестве датчиков угловой скорости и скоростной обратной связи. Достоинство их – отсутствие коллектора и щеток.
Имеется несколько различных типов электрических тахометров переменного тока и все они хороши тем, что датчики- генераторы их выполняются в виде однофазного или двухфазного генератора с неподвижными обмотками, от которых отводится переменный ток. Магнитная система представляет собой постоянные магниты двухполюсного или многополюсного типа.
В качестве указателей оборотов применяются электромагнитные, тепловые или индукционные электрические измерительные приборы—вольтметры.
В комплект индукционного тахометра входят следующие элементы:

В зависимости от места установки тахометра и способа применения тахометры подразделяют на стационарные, дистанционные и ручные. По принципу действия, различают механические (центробежные), магнитные, магнитно-индукционные, электрические и электронные тахометры.
Механические тахометры
Принцип действия механических тахометров основан на использовании центробежных сил, пропорциональных квадрату угловой скорости, действующих на центробежные расходящиеся грузы (наклонное кольцо), находящиеся на валу и вращающиеся вместе с ним вокруг оси, (рис. 1, а). Чувствительным элементом является кольцо 1 на оси 2, проходящей через приводной валик 3. Кольцо нагружено спиральной пружиной 4 и связано тягой 5 с подвижной муфтой 6. При вращении валика кольцо стремится занять положение, перпендикулярное к оси вращения. Муфта через промежуточное кольцо 9 и зубчатую рейку 7 входит в зацепление с шестерней 10, на оси которой закреплена стрелка 8, движущаяся вдоль шкалы прибора (градуирована в об/мин.). Тахометр закреплен неподвижно, а вал 3 приводится во вращение через передачу от вала двигателя.

При установившемся режиме центробежная сила, действующая на вращающееся кольцо 1, уравновешивается силой действия спиральной пружины, и стрелка тахометра неподвижна. При изменении частоты вращения вала равновесие сил нарушается, вызывая разворот кольца относительно оси 2 на угол α и соответствующий разворот стрелки 8 прибора. Механические центробежные измерительные приборы обладают нелинейной статической характеристикой, поэтому их шкала неравномерная.
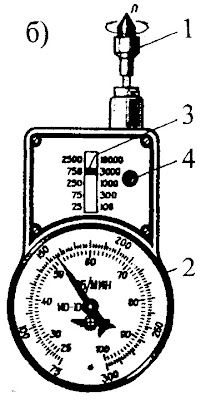
Периодический контроль частоты вращения и проверку стационарных тахометров производят механическим центробежным ручным тахометром (рис. 1, б), прижимая наконечник 1 к торцу вращающегося вала. В корпус 2 встроен редуктор с переключающим устройством, позволяющий менять передаточное отношение от наконечника 1 к чувствительному элементу для измерения в пяти диапазонах частоты вращения от 25 до 10000 об/мин. Переключают редуктор и устанавливают указатель 3 путем перемещения вдоль оси наконечника приводного вала при нажатой кнопке 4. В зависимости от установленного диапазона частоты вращения показания прибора определяют по одной из двух шкал.
К преимуществам механических тахометров относится высокая точность показаний, а к недостаткам - невозможность дистанционного отсчета.
Магнитоиндукционные тахометры
Магнитоиндукционный тахометр имеет равномерную шкалу. В тахометре (рис. 2.) вращение от приводного вала 1 через конические шестерни и вал 2 передается ротору с постоянными магнитами 3, между которыми на оси 10 находится алюминиевый диск 4.

Под действием вращающегося поля магнитов в диске индуцируется электрический ток, создающий свое магнитное поле. Сила взаимодействия магнитных полей уравновешивается силой действия волосковой пружины 5, один конец которой закреплен на оси 10, а другой - в корпусе прибора.
Пропорционально частоте вращения приводного вала 1 изменяются действующие силы, разворот диска 4, оси 10 и жестко связанной с ней стрелки 7 вдоль шкалы 8.
В прибор вмонтирован магнитоиндукционный успокоитель, состоящий из алюминиевого диска 9, закрепленного на валу 10, и неподвижной системы с постоянными магнитами 6. При движении в диске 9 индуцируется ток и создается магнитное поле, взаимодействующее с полем постоянных магнитов. А так как сила взаимодействия этих полей направлена в сторону, противоположную движению диска, то происходит торможение колебаний стрелки прибора.
Дистанционные магнитоиндукционные тахометры
Дистанционное измерение частоты вращения основано на принципе электрической дистанционной передачи вращения вала двигателя валу магнитно-индукционного измерительного узла измерителя и преобразования частоты вращения вала в угловые перемещения стрелки измерителя.

Тахометр работает следующим образом (рис. 3): в обмотке статора 11 датчика при вращении ротора 15 возбуждается трехфазовый ток с частотой, пропорциональной частоте вращения вала двигателя. Ток по трем проводам приводится к обмотке статора 12 синхронного серводвигателя.
Частота вращения магнитного поля статора измерителя пропорциональна частоте токов в обмотках фазы. Ротор двигателя измерителя вращается с частотой, синхронной вращению магнитного поля статора. На конце вала ротора двигателя укреплен магнитный узел 2 с шестью парами постоянных магнитов, между полюсами которых расположен чувствительный элемент 8. При вращении магнитного узла в чувствительном элементе индуцируются вихревые токи. В результате взаимодействия вихревых токов с магнитным полем магнитного узла создается вращающий момент чувствительного элемента. Вращающему моменту чувствительного элемента противодействует спиральная пружина 7, - один конец которой укреплен на оси чувствительного элемента, другой - неподвижен. Так как момент спиральной пружины пропорционален углу ее закручивания, то угол поворота чувствительного элемента пропорционален частоте вращения магнитного узла, и соответствует частоте вращения вала двигателя. На другом конце оси чувствительного элемента укреплена стрелка 5, показывающая по равномерной шкале 4 измерителя частоту вращения вала двигателя.
Для повышения устойчивости стрелки и улучшения отсчета показаний прибора применено демпфирование подвижной системы измерителя. При движении подвижной системы магнитный поток магнита 6 наводит в алюминиевом диске 3 вихревые токи, которые взаимодействуют с магнитным полем магнитов, и в подвижной системе возникает тормозящий момент. Ротор состоит из двух постоянных магнитов 13 и трех гистерезисных дисков 14, соединенных вместе. Взаимодействие ротора с магнитным полем статора - определяется взаимодействием магнитных полей постоянных магнитов статора и гистерезисных дисков.
Электрические тахометры
Электрические тахометры служат для дистанционного контроля направления и частоты вращения валов в диапазоне до 1500 об/мин. Датчиками в них служат тахогенераторы - миниатюрные генераторы переменного или постоянного тока, вырабатывающие напряжение, пропорциональное частоте вращения вала. Указателями являются магнитоэлектрические вольтметры со шкалой, градуированной в единицах частоты вращения.

Счетчики оборотов
Для суммирования числа оборотов вала двигателя или механизма применяют специальные счетчики оборотов. Упрощенная принципиальная схема дистанционного электромеханического счетчика представлена на рис. 5.
На валу 9 жестко закреплены храповое колесо 5 и цифровой барабан 7, а цифровые барабаны 6 свободно насажены на вал. Барабаны кинематически соединены между собой так, что при полном обороте каждого из них соседний слева разворачивается на 1/10 оборота. На каждый барабан нанесены цифры от 0 до 9. Таким образом обеспечивается десятичная система отсчета. Число читается в рамке прибора 8. Колесо 5 входит в зацепление с храповиком 3, который в одну сторону перемещается под действием пружины 4, а в другую - якорем 2 электромагнитной катушки 1. Катушка получает питание Uп от сети через герметичные контакты выключателя 13. В выключателе на пластинчатой пружине с контактом закреплен постоянный магнит 12. Выключатель крепится к корпусу двигателя таким образом, чтобы между якорем 12 и стальным штифтом 10 вала 11 был установлен зазор, обеспечивающий притягивание якоря и замыкание цепи питания катушки 1.

Широко распространены магнитоуправляемые контакты (герконы). Прибор представляет собой две тонкие пермалоевые пластины с небольшим зазором между концами, впаянные в стеклянную колбу, из которой выкачан воздух (в некоторых приборах колбу заполняют инертным газом). При появлении вблизи геркона магнитного поля постоянного или электрического магнита происходит взаимное притягивание (прогиб) пластин и замыкание контактов. Постоянный магнит крепится на вращающемся валу 11 вместо штифта 10.
При каждом обороте вала независимо от направления его вращения катушка 1, получив питание, втягивает якорь 2 и смещает храповик 3 на один зуб колеса 5. При обесточивании катушки храповик под действием пружины 4 смещается в первоначальное положение, разворачивает колесо 5, вал 9 и барабан 7 на 1/10 оборота, что приводит к изменению показаний счетчика на одну единицу. Через один оборот барабана 7 соседний барабан 6 разворачивается на 1/10 оборота, отсчитав 10 оборотов вала 11, и т. д.
Читайте также: