
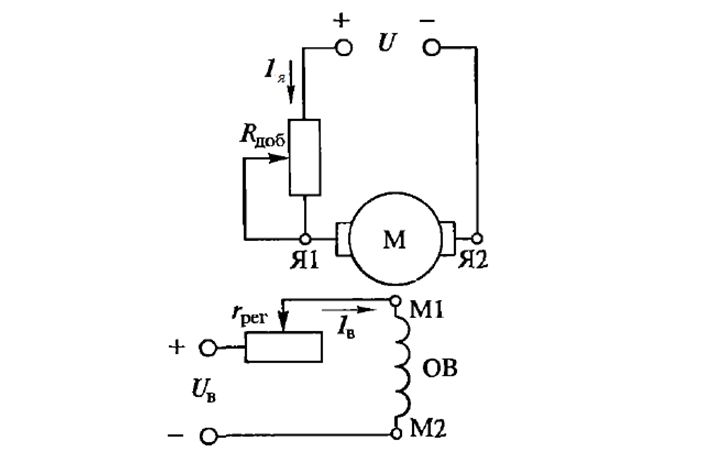
Электрическая схема электродвигателя стартера с параллельным возбуждением
К валу двигателя подключена нагрузка (то, что он должен крутить)
Если проверить как будет меняться момент двигателя по мере разгона нагрузки, то оказывается, что сначала, он самый большой, постепенно снижается.
Механическая характеристика электродвигателя с последовательным возбуждением.
Из характеристики видно, что пока двигатель не тронулся с места (обороты раны нулю) крутящий момент максимальный.

Это самое подходящее свойство для пуска тяжелых нагрузок. Момент должен быть максимальным именно тогда, когда нагрузка еще не сдвинулась с места. Дальше, по мере разгона, момент сопротивления снижается, поэтому момент электродвигателя способен поддерживать вращение нагрузки. Такие свойства подходят для многих случаев, когда надо сдвинуть с места, например, электропоезд, подъемный механизм и т. д.
Начало вращения двигателя внутреннего сгорания тоже тяжелый процесс. Детали двигателя имеют внушительную массу, а кроме того, двигатель сразу же начинает сжимать воздух в части цилиндров, поэтому провернуть его очень непросто.
Таким образом, для стартера нужно использовать двигатель с последовательным возбуждением. У него самый большой крутящий момент, пока он еще не тронулся с места.
Схема электродвигателя стартера с последовательным возбуждением

Обмотки возбуждения расположены вокруг якоря с минимальным зазором, чтобы создать сильное магнитное поле. Ток возбуждения и ток якоря это один и тот же ток, он сначала проходит через одну обмотку возбуждения, потом через вторую, потом через плюсовые щетки, связанные перемычкой, проходит чрез якорь на минусовые щетки.
Другой вариант, тоже последовательное возбуждение, только ток возбуждения разветвляется на две ветви.

Еще одна схема на которой показана полярность намагничивания

Двигатель с последовательным возбуждением имеет опасный недостаток
Если его раскрутить и отпустить (снять нагрузку) он начнет легко раскручиваться дальше, обороты вырастут настолько, что проводники центробежной силой выдернет из ротора, это печальный конец, стартер заклинит и его надо будет сдать в металлолом.
Коротко можно записать так: электродвигатель с последовательным возбуждением склонен к разносу.
Электродвигатель с смешанным возбуждением
Двигатель с параллельным возбуждением значительно хуже справится с началом вращения, но зато, он не боится разноса.
Компромиссное решение состоит в том, что для стартерного электродвигателя применяют смешанную схему возбуждения – основная обмотка последовательная и вспомогательная параллельная. Параллельная обмотка тоже помогает крутить электродвигатель, он она еще и не дает стартеру уйти в разнос.

В этой схеме ток от аккумулятора разветвляется, часть тока идет через левую обмотку возбуждения и последовательно идет через щетки в якорь. Другая часть тока идет через правую, параллельную обмотку возбуждения, сразу на минус.
Большая часть поздних схем стартеров с электромагнитным возбуждением сделаны именно по такой схеме.
Существует несколько возможных разновидностей построения эл моторов, работающих от источника постоянного напряжения. Принцип их действия одинаков, а отличия заключаются в особенностях подключения обмотки возбуждения (ОВ) и якоря (Я).
Свое название эл двигатель постоянного тока с параллельным возбуждением получил потому, что его обмотка Я и ОВ соединяются друг с другом именно таким образом. Электродвигатель такой разновидности обеспечивает нужные режимы, превосходя изделия последовательного и смешанного типов тогда, когда требуется практически постоянная скорость его функционирования.
Построение двигателя и область его применения
Схема электродвигателя рассматриваемого типа изображена ниже.

- общий ток, потребляемый эл мотором от источника, составляет I = IЯ + IВ, где IЯ, IВ – токи через якорь, обмотку возбуждения, соответственно,
- одновременно IВ не зависит от IЯ, то есть не зависит от нагрузки.
Устройство применяется тогда, когда пуск не требует обеспечения высокого момента, то есть когда режимы эксплуатации приводных механизмов не предполагают создание больших стартовых нагрузок. Это типично для станков и вентиляторов.
Для практики ценны такие полезные тяговые параметры подобных эл механизмов как
- устойчивость работы при колебаниях нагрузки,
- высокая экономичность из-за того, что IЯ не протекает через ОВ.
Пуск при недостаточном моменте обеспечивается переходом на схему смешанного типа.
Поведение электромотора при изменении нагрузок
Механическая характеристика показывает устойчивость работы электромотора в широком диапазоне изменения нагрузок, описывая зависимость момента, создаваемого эл двигателем, от скорости функционирования вала.
Тяговые характеристики механизма рассматриваемого типа позволяют сохранить величину момента при значительных изменения количества оборотов. Обычно тяговые параметры агрегата должен обеспечивать уменьшение этого параметра не более чем на 5 %. Несложное исследование демонстрирует: тормозные параметры из-за обратимости процессов оказываются аналогичными. Эти положения распространяются также на случай применения смешанного возбуждения.
Говоря иными словами, для такого эл мотора характерна жесткая характеристика. Такой характер работы считается важным преимуществом агрегата рассматриваемого типа.
Разновидности подходов к регулированию частоты вращения

Принцип действия параллельного включения обмоток обеспечивает плавный пуск в сочетании с большим диапазоном изменения оборотов в процессе работы с помощью реостатов. Они же обеспечивают нормальный пуск двигателя ограничением тока.
Для агрегатов параллельного типа используются способы управления скоростью функционирования изменением:
- магнитного потока главных полюсов,
- сопротивления цепи якоря,
- подаваемого на него напряжения.
Объектом воздействия являются обмотка возбуждения, обмотка якоря, его рабочее напряжение.
Изменение магнитного потока осуществляется с помощью последовательного реостата RР. При увеличении его сопротивления ОВ пропускает меньший ток, что сопровождается уменьшением магнитного потока. Внешним проявлением такого действия становится наращивание оборотов Я на холостом ходу. Исследование показывает, что происходит увеличение угла наклона характеристики.
Второй принцип основан на включении в цепь питания якоря дополнительного последовательного регулировочного реостата. При увеличении его сопротивления скорость вращения Я уменьшается, тогда как его естественная механическая характеристика приобретает больший наклон. Из-за последовательного включения с основной обмоткой реостата дополнительного сопротивления, на котором рассеивается значительная мощность, происходит заметное падение экономичности.
Третий принцип сопровождается определенным усложнением схемных решений и требует применения отдельного регулируемого источника питания с сохранением возможности раздельного регулирования. В случае его применения в реальных условиях возможно только уменьшение частоты вращения вала.
Двигатель с независимым возбуждением
Двигатель постоянного тока независимого возбуждения реализует третий подход к регулированию и интересен тем, что ОВ и М питаются от разных источников, схема его представлена ниже.
Обмотки простейшего электромотора параллельного независимого возбуждения
Для моторов в данном конструктивном исполнении Iв устанавливается неизменным, а меняется только напряжение, приложенное к М. Это сопровождается изменением числа оборотов на холостом ходу, но жесткость характеристики изменений не претерпевает.
Принцип работы такого агрегата за счет независимого функционирования двух источников оказывается более сложным. Однако, его применение дает такие важные для практики преимущества как
- плавное экономичное управление скоростью функционирования с большой глубиной,
- пуск мотора при пониженном напряжении без реостата.
В случае, если пуск происходит на нормальном напряжении, реостат ограничивает величину Iв.
Исследование показывает, что максимальное количество оборотов ограничено только сопротивлением М, а минимальное условиями отвода выделяемого тепла в процессе работы.
Характеристики в части энергопотребления и скорости срабатывания управляющей системы улучшаются в случае последовательного включения с М различных тиристорных регуляторов. Для установки числа оборотов вала и их стабилизации в процессе приведения в движение различных механизмов находят применение различные способы. Их общим характерным признаком является включение тиристорного регулятора в цепь частотной отрицательной обратной связи. Пуск такого агрегата требует реализации специальных процедур.
Заключение
Двигатель с параллельным возбуждением является очень гибким приводным механизмом и может использоваться в очень большом количестве областей там, где не требуются большие моменты при старте. Имеет несложные и надежные цепи регулирования скорости вращения, отличается простотой запуска.
Если обмотка якоря электродвигателя и обмотка возбуждения подключены к различным источникам питания, данный двигатель называют двигателем с независимым возбуждением. Механические и электромеханические характеристики такого двигателя аналогичны характеристикам двигателя с параллельным возбуждением (рис. 1), так как у него ток возбуждения Iв также не зависит от тока якоря Iя .
Из графиков, представленных на рис. 1, б и 1, в видно, что такие электродвигатели характеризуются малой зависимостью частоты вращения якоря от развиваемого вращающего момента, тогда как для стартерного электродвигателя предпочтительнее обратно пропорциональная зависимость между частотой вращения и развиваемым моментом в определенном интервале частот, характерных для режима пуска ДВС.
Последовательное возбуждение
В электродвигателях с последовательным возбуждением обмотка возбуждения подключается последовательно с обмоткой якоря, и поэтому ток в этих обмотках одинаковой величины: Iя = Iв (рис. 2). Следовательно, магнитный поток Ф двигателя является некоторой функцией тока якоря Iя .
Характер этой функции изменяется в зависимости от нагрузки двигателя. При токе якоря Iя меньше 0,8…0,9 номинального тока якоря ( Iном ), когда магнитная система машины насыщена, можно считать, что поток линейно зависит от тока якоря Iя :
где kф – коэффициент пропорциональности, имеющий размерность индуктивности, остается практически постоянным в значительном диапазоне нагрузок.

При дальнейшем возрастании тока якоря поток Ф растет медленнее, чем ток якоря, и при больших нагрузках можно считать величину потока Ф постоянной. В этом случае скоростная и моментальная характеристики становятся линейными аналогично характеристикам двигателя с независимым возбуждением.
Механическая характеристика двигателя с последовательным возбуждением является «мягкой» (рис. 2). При малых нагрузках частота вращения вала n резко возрастает и может превысить максимально допустимое значение (двигатель идет вразнос). Несмотря на этот недостаток, такие двигатели находят широкое применение в различных электрических приводах, где имеют место изменение нагрузочного момента в широких пределах и тяжелые условия пуска. В частности, большинство стартерных электродвигателей имеют последовательное возбуждение.
Объясняется это тем, что «мягкая» характеристика рассматриваемого двигателя более благоприятна для указанных условий работы, чем «жесткая» характеристика двигателя с параллельным возбуждением. При «жесткой» характеристике частота вращения n почти не зависит от момента (рис.1, в).
При «мягкой» характеристике двигателя с последовательным возбуждением частота вращения n обратно пропорциональна М , вследствие чего мощность электродвигателя рассчитывается по формуле:
где С4 – постоянная.
Поэтому при изменении нагрузочного момента в широких пределах, что характерно для пуска ДВС, мощность Рс , а следовательно, и электрическая мощность Рэ = IяUя , и ток Iя у двигателей с последовательным возбуждением изменяются в меньших пределах, чем у двигателей с параллельным возбуждением. Кроме того, они лучше переносят перегрузки.
В электродвигателе со смешанным возбуждением (рис. 3) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения (рис. 3, а): параллельной (ОВ1) и последовательной (ОВ2). Поэтому его механическая характеристика (рис. 3, в; кривые 3, 4) располагается между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением.
Одним из достоинств двигателя со смешанным возбуждением, которые используются в некоторых конструкциях стартеров, является то, что он, обладая «мягкой» механической характеристикой, может работать на холостом ходу, так как частота вращения холостого хода имеет конечное значение.
Таким образом, в стартерах используются двигатели постоянного тока с последовательным и (в отдельных случаях) со смешанным возбуждением.
На рис. 4 представлены схемы внутренних соединений некоторых стартеров отечественного производства.

Возбуждение от постоянных магнитов
В последние годы на стартерах стали применять электродвигатели с возбуждением от постоянных магнитов, которые имеют пониженное энергопотребление вследствие отсутствия тока возбуждения. Однако такие стартеры имеют недостатки, характерные для электродвигателей с независимым (параллельным) возбуждением.
Кроме того, материал для изготовления постоянных магнитов пока еще очень дорогой, поэтому постоянные магниты вместо обмотки возбуждения в настоящее время используются только для небольших стартеров легковых автомобилей.

Использование в стартерных электродвигателях постоянных магнитов для возбуждения потока дает снижение нагрузки на аккумуляторную батарею при пуске ДВС в связи с тем, что такой электродвигатель имеет малый момент и потребляет малые токи.
Повышается возможность пуска двигателя при низких температурах, снижается выходная мощность при малых нагрузках. Кроме того, такие стартера имеют меньшие габариты, по сравнению со стартерами, имеющими обмотку возбуждения.
Однако высокая частота вращения, характерная для таких двигателей в любом нагрузочном режиме, а также относительно небольшой развиваемый вращающий момент повлекли применение на таких стартерах дополнительной механической передачи, уменьшающей частоту вращения якоря и увеличивающего вращающий момент, передаваемый коленчатому валу ДВС. Обычно в качестве дополнительной механической передачи используется планетарный зубчатый редуктор, конструкция которого отличается компактностью.
К недостаткам, присущим стартерам с возбуждением от постоянных магнитов можно добавить тяжелые условия работы муфты свободного хода и щеточно-коллекторного узла электродвигателя, повышенный шум из-за высокой частоты вращения и наличия редуктора. Применение стартеров с редукторами потребовало изменить технологию их изготовления. В частности, для увеличения механической прочности вращающихся частей стали применять более прочную изоляцию обмоток якоря, пайка соединений в главных цепях заменена сваркой, производится точная балансировка вращающихся частей и т. п.

Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
1. с независимым возбуждением : обмотка возбуждения питается от постороннего источника постоянного тока (возбудителя или выпрямителя) ,
2. с параллельным возбуждением : обмотка возбуждения подключена параллельно обмотке якоря,
3. с последовательным возбуждением : обмотка возбуждения включена последовательно с обмоткой якоря,
4. со смешанным возбуждением : он имеет две обмотки возбуждения, одна подключена параллельно обмотке якоря, а другая — последовательно с ней.
Все эти электродвигатели имеют одинаковое устройство и отличаются лишь выполнением обмотки возбуждения. Обмотки возбуждения указанных электродвигателей выполняют так же, как у соответствующих генераторов .
Электродвигатель постоянного тока с независимым возбуждением
В этом электродвигателе (рис. 1, а) обмотка якоря подключена к основному источнику постоянного тока (сети постоянного тока, генератору или выпрямителю) с напряжением U, а обмотка возбуждения — к вспомогательному источнику в напряжением UB. В цепь обмотки возбуждения включен регулировочный реостат Rрв, а в цепь обмотки якоря — пусковой реостат Rn.
Регулировочный реостат служит для регулирования частоты вращения якоря двигателя, а пусковой — для ограничения тока в обмотке якоря при пуске. Характерной особенностью электродвигателя является то, что его ток возбуждения Iв не зависит от тока Iя в обмотке якоря (тока нагрузки). Поэтому, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя Ф не зависит от нагрузки. Зависимости электромагнитного момента М и частоты вращения n от тока Iя будут линейными (рис. 2, а). Следовательно, линейной будет и механическая характеристика двигателя — зависимость п (М) (рис. 2, б).
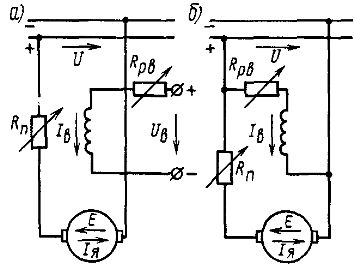
Рис. 1. Принципиальные схемы электродвигателей постоянного тока с независимым (а) и параллельным (б) возбуждением
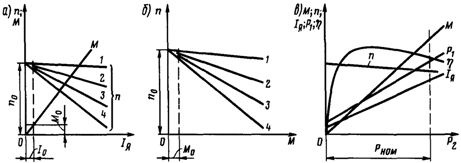
Рис. 2. Характеристики электродвигателей постоянного тока с независимым и параллельным возбуждением : а — скоростные и моментная, б — механические, в — рабочие Чем больше сопротивление Rn, тем больший угол наклона имеет реостатная характеристика, т. е. тем она мягче.
Регулировочный реостат Rpв позволяет изменять ток возбуждения двигателя Iв и его магнитный поток Ф. При этом будет изменяться и частота вращения n.
В цепь обмотки возбуждения никаких выключателей и предохранителей не устанавливают, так как при разрыве этой цепи резко уменьшается магнитный поток электродвигателя (в нем остается лишь поток от остаточного магнетизма) и возникает аварийный режим. Если электродвигатель работает при холостом ходе или небольшой нагрузке на валу, то частота вращения резко возрастает (двигатель идет вразнос). При этом сильно увеличивается ток в обмотке якоря Iя и может возникнуть круговой огонь. Во избежание этого защита должна отключить электродвигатель от источника питания.
При нагрузке на валу, близкой к номинальной, электродвигатель в случае разрыва цепи возбуждения остановится, так как электромагнитный момент, который может развить двигатель при значительном уменьшении магнитного потока, уменьшается и станет меньше нагрузочного момента на валу. В этом случае так же резко увеличивается ток Iя, и машина должна быть отключена от источника питания.
Следует отметить, что частота вращения n0 соответствует идеальному холостому ходу, когда двигатель не потребляет из сети электрической энергии и его электромагнитный момент равен нулю. В реальных условиях в режиме холостого хода двигатель потребляет из сети ток холостого хода I0, необходимый для компенсации внутренних потерь мощности, и развивает некоторый момент M0, требуемый для преодоления сил трения в машине. Поэтому в действительности частота вращения при холостом ходе меньше n0.
Зависимость частоты вращения n и электромагнитного момента М от мощности Р2 (рис. 2, в) на валу двигателя, как следует из рассмотренных соотношений, является линейной. Зависимости тока обмотки якоря Iя и мощности Р1 от Р2 также практически линейны. Ток Iя и мощность Р1 при Р2 = 0 представляют собой ток холостого хода I0 и мощность Р0, потребляемую при холостом ходе. Кривая к. п. д. имеет характер, общий для всех электрических машин.
Электродвигатель постоянного тока с параллельным возбуждением
В этом электродвигателе (см. рис. 1, б) обмотки возбуждения и якоря питаются от одного и того же источника электрической энергии с напряжением U. В цепь обмотки возбуждения включен регулировочный реостат Rpв, а в цепь обмотки якоря — пусковой реостат Rп.
В рассматриваемом электродвигателе имеет место, по существу, раздельное питание цепей обмоток якоря и возбуждения, вследствие чего ток возбуждения Iв не зависит от тока обмотки якоря Iв. Поэтому электродвигатель с параллельным возбуждением будет иметь такие же характеристики, как и двигатель с независимым возбуждением. Однако двигатель с параллельным возбуждением работает нормально только при питании от источника постоянного тока с неизменным напряжением.
При питании электродвигателя от источника с изменяющимся напряжением (генератор или управляемый выпрямитель) уменьшение питающего напряжения U вызывает соответствующее уменьшение тока возбуждения Iв и магнитного потока Ф, что приводит к увеличению тока обмотки якоря Iя. Это ограничивает возможность регулирования частоты вращения якоря путем изменения питающего напряжения U. Поэтому электродвигатели, предназначенные для питания от генератора или управляемого выпрямителя, должны иметь независимое возбуждение.
Электродвигатель постоянного тока с последовательным возбуждением
Для ограничения тока при пуске в цепь обмотки якоря включен пусковой реостат Rп (рис. 3, а), а для регулирования частоты вращения параллельно обмотке возбуждения может быть включен регулировочный реостат Rрв.
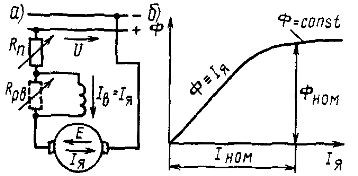
Рис. 3. Принципиальная схема электродвигателя постоянного тока с последовательным возбуждением (а) и зависимость его магнитного потока Ф от тока Iя в обмотке якоря (б)
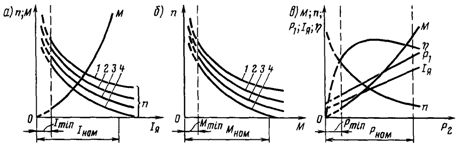
Рис. 4. Характеристики электродвигателя постоянного тока с последовательным возбуждением: а — скоростные и моментная, б — механические, в — рабочие.
Характерной особенностью этого электродвигателя является то, что его ток возбуждения Iв равен или пропорционален (при включении реостата Rpв) току обмотки якоря Iя, поэтому магнитный поток Ф зависит от нагрузки двигателя (рис. 3, б).
Электромагнитный момент М при увеличении тока Iя будет резко возрастать, так как в этом случае увеличивается и магнитный поток Ф, т. е. момент М будет пропорционален току Iя. Поэтому при токе Iя, меньшем (0,8 Н- 0,9) Iном, скоростная характеристика имеет форму гиперболы, а моментная — параболы.
При токах Iя > Iном зависимости М и п от Iя линейны, так как в этом режиме магнитная цепь будет насыщена и магнитный поток Ф при изменении тока Iя меняться не будет.
Механическая характеристика, т. е. зависимость n от М (рис. 4, б), может быть построена на основании зависимостей n и М от Iя. Кроме естественной характеристики 1, можно путем включения в цепь обмотки якоря реостата с сопротивлением Rп получить семейство реостатных характеристик 2, 3 и 4. Эти характеристики соответствуют различным значениям Rn1, Rn2 и Rn3, при этом чем больше Rn, тем ниже располагается характеристика.
Механическая характеристика рассматриваемого двигателя мягкая и имеет гиперболический характер. При малых нагрузках магнитный поток Ф сильно уменьшается, частота вращения n резко возрастает и может превысить максимально допустимое значение (двигатель идет вразнос). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода и при небольшой нагрузке (различные станки, транспортеры и пр.).
Обычно минимально допустимая нагрузка для двигателей большой и средней мощности составляет (0,2 …. 0,25) Iном. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко (зубчатой передачей или глухой муфтой), применение ременной передачи или фрикционной муфты недопустимо.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют, особенно там, где имеют место изменения нагрузочного момента в широких пределах и тяжелые условия пуска: во всех тяговых приводах (электровозы, тепловозы, электропоезда, электрокары, электропогрузчики и пр.), а также в приводах грузоподъемных механизмов (краны, лифты и пр.).
Объясняется это тем, что при мягкой характеристике увеличение нагрузочного момента приводит к меньшему возрастанию тока и потребляемой мощности, чем у двигателей с независимым и параллельным возбуждением, поэтому двигатели с последовательным возбуждением лучше переносят перегрузки. Кроме того, эти двигатели имеют большой пусковой момент, чем двигатели с параллельным и независимым возбуждением, так как при увеличении тока обмотки якоря при пуске соответственно увеличивается и магнитный поток.
Если принять, например, что кратковременный пусковой ток может в 2 раза превышать номинальный рабочий ток машины, и пренебречь влиянием насыщения, реакцией якоря и падением напряжения в цепи его обмотки, то в двигателе с последовательным возбуждением пусковой момент будет в 4 раза больше номинального (в 2 раза увеличиваются и ток, и магнитный поток), а в двигателях с независимым и параллельным возбуждением — только в 2 раза больше.
В действительности из-за насыщения магнитной цепи магнитный поток не увеличивается пропорционально току, но все же пусковой момент двигателя с последовательным возбуждением при прочих равных условиях будет значительно больше пускового момента такого же двигателя с независимым или параллельным возбуждением.
Электродвигатель постоянного тока со смешанным возбуждением
В этом электродвигателе (рис. 5, а) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения — параллельной (или независимой) и последовательной, по которым проходят токи возбуждения Iв1 и Iв2 = Iя
где Фпосл — магнитный поток последовательной обмотки, зависящий от тока Iя, Фпар — магнитный поток параллельной обмотки, который не зависит от нагрузки (определяется током возбуждения Iв1).
Механическая характеристика электродвигателя со смешанным возбуждением (рис. 5, б) располагается между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением. В зависимости от соотношения магнитодвижущих сил параллельной и последовательной обмоток при номинальном режиме можно приблизить характеристики двигателя со смешанным возбуждением к характеристике 1 (кривая 3 при малой м. д. с. последовательной обмотки) или к характеристике 2 (кривая 4 при малой м. д. с. параллельной обмотки).
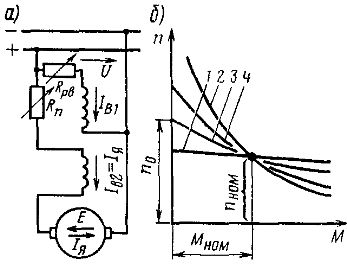
Рис. 5. Принципиальная схема электродвигателя со смешанным возбуждением (а) и его механические характеристики (б)
Достоинством двигателя постоянного тока со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, когда Фпосл=0. В этом режиме частота вращения его якоря определяется магнитным потоком Фпар и имеет ограниченное значение (двигатель не идет вразнос).
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Несмотря на то, что электродвигатели постоянного тока не так популярны, как устройства, работающие на переменном токе, сфера их применения довольно широка: они используются в быту, в качестве элементов различного наземного транспорта, а также на предприятиях в приводах элементов, бесперебойное электроснабжение которых осуществляется аккумуляторными батареями. Именно поэтому на сайте торгового дома Степмотор представлен широкий ассортимент устройств такого типа. Отличительной особенностью электродвигателей постоянного тока является наличие обмоток возбуждения, при этом от того, каким образом они будут подключены к сети, напрямую зависят пусковые характеристики, механические и электрические свойства двигателя.
Схемы подключения электродвигателя постоянного тока
В зависимости от требуемых выходных характеристик электродвигателя постоянного тока, его подключение может быть осуществлено по одной из принципиальных схем: подключение с независимым, последовательным, параллельным или смешанным типом возбуждения. Схематическое изображение типов подключения электродвигателя постоянного тока представлено на иллюстрации, при этом каждый из типов подключения привносит свои особенности в эксплуатацию механизма.
Подключение с независимым возбуждением
При использовании такой схемы подключения обмотка возбуждения подключается напрямую к независимому источнику. При использовании такой схемы подключения общие характеристики электродвигателя станут идентичны двигателю, работающему на постоянных магнитах. Регулировка скорости вращения осуществляется с помощью сопротивления, возникающего в якорной цепи, или же при помощи реостата – регулировочного сопротивления в цепи обмотки возбуждения. При этом следует отметить, что при регулировке реостатом важно следить за величиной сопротивления в цепи обмотки: при сильном уменьшении этого значения (а также при обрыве) токи якоря резко возрастают, достигая опасных величин. При использовании для подключения схемы независимого возбуждения запрещается запуск электродвигателя на холостом ходу или при дефиците валовой нагрузки: такие действие неминуемо приведут к резкому увеличению скорости вращения и повреждению механизма.
Подключение с параллельным возбуждением
При использовании такого типа подключения подключение обмоток ротора и возбуждение происходит параллельно, к единому источнику питания. Таким образом, при включении электродвигателя в сеть на ротор подаётся большее количество тока, чем на обмотку возбуждения, благодаря чему выходные характеристики параллельно подключённого двигателя постоянного тока позволяют использовать их в приводах станков и прочего промышленного оборудования. Скорость вращения регулируется реостатами в цепи ротора.
Подключение с последовательным возбуждением
При использовании такого типа подключения якорная обмотка и обмотка возбуждения используют один ток, а их включение осуществляется попеременно. Скорость и нагрузка в двигателе постоянного тока, подключённом по последовательной схеме, прямо пропорциональны друг другу. Запуск на холостом ходу запрещён. Благодаря хорошим пусковым характеристикам, обеспечиваемым подключением с последовательным возбуждением, двигатели постоянного тока, подключённые по такой схеме, широко применяются в электротранспорте.
Подключение со смешанным возбуждением
Применение схемы смешанного возбуждения при подключении электродвигателя постоянного тока используются две попарно расположенные на полюсах двигателя обмотки возбуждения. Здесь существуют два варианта подключения: потоки будут либо складываться, либо вычитаться. В первом случае особенности работы электродвигателя будут аналогичны подключению по схеме последовательного возбуждения, во втором – параллельного.
Читайте также: