
Оценка водителя в грузовике в бортовом компьютере в баллах
04/09/2013 18:50:36 Баллы в отчетах по нарушениям - оценка качества вождения
Тема: Баллы в отчетах по нарушениям - оценка качества вождения
Добрый вечер Комьюнити,
Возникла проблема, надеюсь на вашу поддержку.
От саппорта получил ответ, переходить на хостинг, писать на SDK, сменить ориентацию и не голосовать за республиканцев
Но я уверен что-то приблизительное к нашей задаче можно реализовать существующими средствами Wialon Pro.
Задача - видеть в отчетах итоговые баллы, из расчета по количеству нарушений.
Система берет в расчет количество резких тормозов, резких разгонов, и на основе пройденого километража и диапазона времени выдаёт в отчете - итоговые баллы нарушений.
В теории я думаю создать датчики (ускорения,торможения),и потом некий произвольный,виртуальный датчик,который будет на основе данных первых,по формуле вычислять свой результат в баллах.
И соотв. сделать некий шаблон отчета по данноу виртуальному датчику.
Скажем у нас в системе 2 датчика. Один считает количество ускорений - Accel, другой количество торможений - Brake.
Формула вычисления этих баллов такова -
((Accel / километраж) x 100) + ((Brake /километраж) x 100) = Score
Главный вопрос,
если создаеться отчет за месяц, как в формулу расчета датчика добавить значение километраж за этот месяц?
17/12/2010 23:09:41 Баллы в отчетах по нарушениям - оценка качества вождения
Добрый вечер.
У меня вопрос необычный.
Есть серьезная компания, которая устанавливает жесткие правила для сотрудников- водителей.
Одним из правил это нельзя резко трогаться с места ( с прокруткой) и также резко тормозить. Карают строго.
Перед нами заказчик поставил задачу - Мы хотим это контролировать при помощи системы.
Может кто то подсказать. что можно им предложить.
17/12/2010 23:12:52 Баллы в отчетах по нарушениям - оценка качества вождения
Добрый вечер.
У меня вопрос необычный.
Есть серьезная компания, которая устанавливает жесткие правила для сотрудников- водителей.
Одним из правил это нельзя резко трогаться с места ( с прокруткой) и также резко тормозить. Карают строго.
Перед нами заказчик поставил задачу - Мы хотим это контролировать при помощи системы.
Может кто то подсказать. что можно им предложить.С уважением
Низами
Идем на "базар" покупаем телтонику, включаем акселерометр - и радуемся.
Второй дорогой вариант, покупаем скварель модуль ( от типа авто зависит модель) в результате показываем чудо графики с тахографом и т.д.
Цена вопроса данного решения.
20/12/2010 10:19:41 Баллы в отчетах по нарушениям - оценка качества вождения
У Скаута еще есть специализированный виртуальный датчик резкого ускорения в терминале.
20/12/2010 10:48:23 Баллы в отчетах по нарушениям - оценка качества вождения
А как на тельтонике правильно настроить акселерометр? Может кто усредненые значения подскажет.
20/12/2010 11:10:23 Баллы в отчетах по нарушениям - оценка качества вождения
А как на тельтонике правильно настроить акселерометр? Может кто усредненые значения подскажет.
Самый лучший вариант описан в мануале. Изредка необходимо корректировать уже по ходу движения транспортного средства. Ускорение и торможение.
25/12/2010 12:29:59 Баллы в отчетах по нарушениям - оценка качества вождения
В мануале описан вариант настройки акселерометра, но это нужно как я понял для более точного определения : подвижность-неподвижность (I/O Movement (param240 1/0)), а в нашем случае нужно измеренить само ускорения. В I/O так же есть Acceleration event (param23), только не понятно что за значения отправляет. В мануале это значение описано так: "g*10". В неподвижном состоянии param23= ~87. Возникает вопрос: что такое "g"?
25/12/2010 15:01:35 Баллы в отчетах по нарушениям - оценка качества вождения
В мануале описан вариант настройки акселерометра, но это нужно как я понял для более точного определения : подвижность-неподвижность (I/O Movement (param240 1/0)), а в нашем случае нужно измеренить само ускорения. В I/O так же есть Acceleration event (param23), только не понятно что за значения отправляет. В мануале это значение описано так: "g*10". В неподвижном состоянии param23= ~87. Возникает вопрос: что такое "g"?
Же это ускорение зайдите на сайт гонщиков Формулы 1 и они вам скажут или пилотов истребителей сверхзвуковых
25/12/2010 16:20:41 Баллы в отчетах по нарушениям - оценка качества вождения
Же это ускорение зайдите на сайт гонщиков Формулы 1 и они вам скажут или пилотов истребителей сверхзвуковых
g= 9.8 м/с2 *10 (kak opisano v manulae) = 98 м/с2.
где 9.8 м/с2 - ускорение сводного падения. Большеге думаю ничего мне не расскажут.
По данным пришедшые с трекера выходит так что трекер имеет ускорение, а сам трекер неподвижен. Может у меня с трекором что то не так.

Автомобильные и технологические компании лихорадочно занимаются системами безопасности, которые могут обнаруживать различные объекты и избегать столкновения с ними. Но занимается ли кто-нибудь разработкой систем, которые могли бы наблюдать за водителями и отслеживать опасное рассеивание их внимания?
Да, но об этом почти никто не говорит.
Впрочем, люди будут оставаться в игре еще много лет, а частичная автоматизация создает ложное чувство безопасности – из-за него люди слишком сильно отвлекаются от управления автомобилем.
Многие исследования и испытания подтверждают тот вывод, который можно сделать после просмотра фильма. В этом тексте мы хотим задать два ключевых вопроса:
- Почему сейчас нужны системы мониторинга водителя?
- Какие компании и какие технологии лидируют на рынке этих систем?
Собираем сведения
На прошлой неделе Страховой институт безопасности дорожного движения (IIHS) опубликовал результаты исследования, по которым видно негативное влияние автоматизации в автомобилях 1 и 2 уровня автономности.
Тревогу в связи с этим бьет не только IIHS.
Оценки систем помощи при вождении – октябрь 2020

Мисси Каммингс, директор лаборатории по исследованиям взаимодействия людей и систем автоматизации из Университета Дюка в прошлом месяце высказывалась о "загадках частичной автоматизации". В своем недавнем исследовании «Взаимодействие автопилота и систем мониторинга водителей в Tesla Model 3” Каммингс подчеркнула, что так называемая „совместная ответственность“ компьютеров и людей является реальной проблемой.
Ранее в этом году Национальный совет по транспортной безопасности (NTSB), расследовавший две фатальные аварии с участием автомобилей от Tesla, опубликовал итоговый отчет по этому делу. Председатель NTSB делал весьма резкие замечания о системе автопилота от Tesla: „Чрезмерное доверие водителей к автопилоту от Tesla привело к трагическим последствиям“.
Принимая во внимание все свидетельства об отвлечении водителей из-за систем автоматизации, Колин Барнден, ведущий аналитик из Semicast Research сказал, что он „просто не понимает почему мы так долго не осознавали важность систем мониторинга водителей и потребность в них“.
Барнден, который зачастую в одиночку защищает системы мониторинга водителей перед СМИ и сообществом аналитиков, имеет свое мнение по этому вопросу. Он сделал следующее заявление:
Все основные СМИ сейчас преимущественно пишут о системах беспилотной езды. Пресса склонна следить за деньгами. Так, например, рыночная капитализация Tesla составляет 460 миллиардов долларов. Mobileye была продана за 15 миллиардов. Seeing Machines (разработчик систем мониторинга водителей) стоит около 275 миллионов долларов.
Несмотря на все деньги, которые крутятся на этом рынке, у NHTSA нет никаких нормативов касательно систем мониторинга водителей. Между тем, в Европе есть две дорожные карты внедрения этих систем (Euro NCAP и общие правила безопасности в ЕС). Даже у Китая есть стратегия развития мониторинга водителей! Кажется, что все сложилось в пользу разработчиков полноценных стеков для беспилотной езды. Так уж сложилось, что все они находятся в США.
Оглядываясь назад, Барнден сказал:
Скепсис в отношении систем мониторинга водителя
Внесем ясность, автопилот от Tesla оснащен датчиком, который отслеживает небольшие сдвиги положения рулевого колеса – так система контролирует, что водитель не убирает руки с руля. Как известно, эта система не идеальна, она не принимает никаких решений, пока водитель не убирает руки с руля на целых две минуты.
За последние несколько лет на рынке систем мониторинга водителей появилось множество новых компаний. Среди них можно выделить Seeing Machines (Канберра, Австралия), Smart Eye AB (Гётеборг, Швеция), Eyesight Technologies (Герцлия, Израиль), Jungo Connectivity (Нетания, Израиль), Xperi, которая приобрела FotoNation (Сан-Хосе, Калифорния) и Affectiva (Бостон).

Базовые блоки систем мониторинга водителей от Smart Eye.
Если Маск все еще считает, что системы мониторинга водителей ограничиваются отслеживанием направления взгляда, то он немного отстал. Многие системы от ведущих компаний уже не ограничиваются отслеживанием какого-то одного параметра (вроде положения головы, взгляда, лица или положения век). Эти системы отслеживают совокупность параметров для более целостного представления данных и их анализа.
Также ДиФоре отметил, что раннее лидерство Seeing Machines на рынке беспилотного транспорта обусловлено не только точностью собираемых данных, но и архитектурой их решений, которая облегчила работу с сигналами и доступ к ним.
Различий между Seeing Machines и их конкурентами стало больше, когда компании на рынке систем мониторинга водителей стали применять научные сведения о человеческом факторе к собранным данным, чтобы понять что же на самом деле происходит в голове у водителя.
От распознавания лиц к чтению мыслей
Следующий этап – использование вероятностных систем ИИ для применения сведений о человеческом факторе и поведении к оценке уровне вовлеченности водителей.
Чипы и программные решения
До недавнего времени многие компании были уверены в том, что в их решениях не нужны системы мониторинга водителей, либо ограничивались обсуждением передачи ответственности между машинами и людьми в автомобилях с 3 уровнем автономности. Многие компании думали, что если они планируют перескочить третий уровень и сразу разрабатывать машины четвертого, то и системами мониторинга можно не заниматься.
Отвечая на вопрос о автопроизводителях, которые используют в своих решениях системы мониторинга водителей, Барнден отметил, что GM в начале 2013 года представила систему мониторинга, которая позже стала Super Cruise. За ними вскоре последовали BMW, Subaru и Nissan, затем в 2017 такую систему установили в Mercedes S-Class 2017 года, а в 2018 году систему мониторинга установили в Ford F-150.
Барнден делает ставку на Seeing Machines – отчасти ввиду их опыта и ряда их соглашений на поставку. Компания Seeing Machines гордится большими массивами данных, собранных с более чем 23 000 водителей грузовиков (к ним также нужно прибавить данные с нескольких тысяч автомобилей, собранные в рамках лицензионного соглашения с Caterpillar).
Представитель Seeing Machines отметил, что у компании уже сейчас есть девять партнерских соглашений на использование их систем в продуктах OEM-производителей.
DMS в железе и ПО
Как нам объяснил ДиФоре, примерно половина бизнеса Seeing Machines в области систем мониторинга водителей основана на программных решениях, а другая – на микросхемах. В области систем мониторинга давним партнером Seeing Machines является Xilinx. Благодаря своей программируемости, чип Xilinx Fovio получил признание от OEM-производителей.
Seeing Machines также предлагает OEM-производителям исключительно программные системы мониторинга, которые позволяют экономить на специфических чипах.
Согласно заявлениям Seeing Machines, GM – единственный автопроизводитель, использующий систему мониторинга водителей в Cadillac CT6 (в качестве компонента системы Super Cruise). Seeing Machines добавила, что новые модели уже находятся в разработке. Seeing Machines поставляла только свое ПО GM по условиям партнерского соглашения.
Seeing Machines также выиграла контракты на поставку систем мониторинга водителей в виде чипов Fovio у двух американских автопроизводителей и одной китайской компании.
НПП ИТЭЛМА всегда рада молодым специалистам, выпускникам автомобильных, технических вузов, а также физико-математических факультетов любых других высших учебных заведений.
У вас будет возможность разрабатывать софт разного уровня, тестировать, запускать в производство и видеть в действии готовые автомобильные изделия, к созданию которых вы приложили руку.
В компании организован специальный испытательный центр, дающий возможность проводить исследования в области управления ДВС, в том числе и в составе автомобиля. Испытательная лаборатория включает моторные боксы, барабанные стенды, температурную и климатическую установки, вибрационный стенд, камеру соляного тумана, рентгеновскую установку и другое специализированное оборудование.
Если вам интересно попробовать свои силы в решении тех задач, которые у нас есть, пишите в личку.
Мы большая компания-разработчик automotive компонентов. В компании трудится около 2500 сотрудников, в том числе 650 инженеров.
Мы, пожалуй, самый сильный в России центр компетенций по разработке автомобильной электроники. Сейчас активно растем и открыли много вакансий (порядка 30, в том числе в регионах), таких как инженер-программист, инженер-конструктор, ведущий инженер-разработчик (DSP-программист) и др.
У нас много интересных задач от автопроизводителей и концернов, двигающих индустрию. Если хотите расти, как специалист, и учиться у лучших, будем рады видеть вас в нашей команде. Также мы готовы делиться экспертизой, самым важным что происходит в automotive. Задавайте нам любые вопросы, ответим, пообсуждаем.
2021 год. IoT окружил нас с Вами со всех сторон. GPS/GLONASS трэкерами и всевозможными облачными платформами слежения нас зазывают со всех сторон. Казалось бы, с чего вдруг я решил, что данный пост имеет актуальность?! Но не все так однозначно - давайте разбираться!
Ни для кого не секрет, что основной статьей затрат при автомобильных грузоперевозках является стоимость топлива. Все участники данной игры (Автомобильные грузоперевозки) прилагают максимум усилий для минимизации данной статьи расходов. Автопроизводители бесконечно совершенствуют свои модели автомобилей, предлагая все более производительные, безопасные и экономичные седельные тягачи. Развитые страны строят более экономичные автомагистрали.
Логистические компании выстраивают более оптимальные логистические маршруты и казалось бы все движется только вверх и вперед и с каждым годом расходы транспортной компании на топливо должны уменьшаться! Но в жизни получается не так. Несомненно, если сравнивать 1990,2000 и 2010 года, то по мере обновления моделей грузовых автомобилей, расход топлива стремительно сокращался. К примеру для грузовиков 1990 года выпуска при перевозке 20 тонн груза расход топлива 45л/100км считался нормальным. Моделям 2000-х годов удавалось выйти из 40л/100км расхода топлива, а грузовики 2010 годов выпуска уже могли хвастаться расходом 30-35 л/100км пути. Но что происходит сейчас, в 2021году? Современные модели грузовиков заявляют о паспортных расходах в 21. 23. 25л/100км, но в реальных условиях транспортные компании получают средний расход автомобилей в районе 30-31л/100км. Встает резонный вопрос?
Получается что автопроизводители лгут и их автомобили не стали более экономичными и это всего лишь маркетинговые ходы? На самом деле нет - проблема кроется в другом.
Автопроизводители, как и производители электроники, очень сильно шагнули вперед и автомобили обогнали в своем развитии людей, которые их эксплуатируют. Ситуация стала такова, что люди, управляющие современными грузовыми автомобилями, не могут раскрыть полный потенциал автомобиля с точки зрения расхода топлива.

Навык эффективного вождения - это такой же полноценный навык, как и умение управлять мотоциклом, или езды на горными лыжами. Конечно, проехать на мотоцикле по прямой и спуститься на лыжах может, в принципе, каждый, но чтобы стать мастером в этом деле - необходимо учиться и бесконечно тренироваться.
Но, казалось бы, с этим у нас тоже должно быть все в порядке. Практически все навигационные системы и GPS/Glonass трэкеры имеют опцию ECO DRIVING которая должна оценивать водителя. Но вот тут как раз таки маркетинг чистой воды!) Опция вроде бы есть, а вот толку от нее нет!
Проанализировав большую часть предложенных решений на рынке, оказалось, что разработчики не стали заморачиваться над проблемой и взяли в основу довольно примитивную методику оценки:

Алгоритмы ECO Driving
Хотел было я дать комментарий к каждому параметру, в чем его + и -, но текста получилось на 3 страницы) В общем, если подвести жирную черту ИТОГО, то эти критерии оценки стиля вождения водителя настолько сильно обобщенные, что более половины ситуаций не анализируются данными критериями, а если и рассматриваются - то безобоснованно штрафуют водителей за ситуации, на которые они не влияют. К примеру критерий Остановки - за рейс Москва - Париж - Москва, автомобиль сделал 157 остановок, из них 54 остановки - это пробки, 82 остановки - это прохождение очередей на границах. 13 остановок - это загрузки/выгрузки/растаможки, и всего 8 остановок были инициированы водителем. А по данной системе оценится он по всем 157 остановкам. ) Системы оценки стиля вождения, основанные на схожих алгоритмах больше игрушка, нежели инструмент оптимизации и управления.
Что же, начнем строить свои алгоритмы!
За исходные данные мы берем седельный тягач, с расширенным CAN протоколом, цифровой ДУТ, вариации с количеством ступеней неизнашивающихся тормозных систем и наличие встроенных электронных помощников (круиз контроль, система аварийного торможения, система слежения за разметкой, система учета рельефа местности и пр.) без привязки к марке грузовика. МКПП и АКПП. Электронная педаль газа и наличием системы EBS не старше 2006г. ПО верхнего уровня Wialon. Выбор обусловлен всеядностью платформы с точки зрения телематического оборудования. GPS трэкер с интерфейсами RS,1-wire, BT, CAN BUS. Дополнительные модули RFID, выносной модуль вибраций (удара). И конечно же нам понадобится гибкая логика, что то вроде Easy Logic от Galileosky.
Итак, начнем, пожалуй, с самого энергозатратного с точки зрения автомобиля параметра.
Превентивная езда/ Режим разгона
Данный критерий характеризует способность водителя к предусмотрительному вождению, т.е. умению водителя прогнозировать и предусматривать дорожную обстановку и принимать управляющее воздействие на автомобиль во время разгона до события, а не по факту. Основная задача избегать РЕЗКИХ управляющих воздействий
Пример: водитель начинает движение и динамично разгоняется до ограничителя скорости в 83 км/ч, но тут же быстренько упирается в идущий автомобиль с меньшей скоростью 75 км/ч, а совершить обгон возможности нет и ему приходится тормозить до скорости данного транспортного средства, а затем снова разгоняться и пытаться его обгонять.
Способ реализации алгоритма: после промежутка разгона автомобиля на >=10км/ч, должен следовать равномерный участок графика скорости в диапазоне +-2км/ч.
Система выставления баллов:
22 секунды прямолинейного движения - 10 баллов,
18 секунд - 9 баллов,
15 секунд - 8 баллов
// 22 секунды взяты из расчета 500 метров прямой видимости на дороге
Для настройки системы оценок необходимо предусмотреть возможность менять константы в пользовательском режиме, т.к. баллы за критерии приведены в этой статье справочно, для понимания алгоритмов.
Превентивная езда/ Режим торможения
Здесь все аналогично Режиму разгона.
Равномерная скорость движения
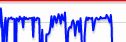
Анти пример: данный параметр нам нужен для борьбы вот с таким вот графиком скорости автомобиля.
Способ реализации алгоритма: Считается количество циклов изменения вектора скорости. Идеальная езда - один цикл от троганья с места до полной остановки.

Система выставления баллов:
10 циклов - 9,0 баллов
20 циклов - 8,0 баллов
!. Изменением вектора считается изменение скорости на величину от 2 км/ч до 10 км/ч. Колебания скорости до 2км/ч обусловлено гистерезисом круиз контроля, а изменение скорости на 10 км/ч и более рассматриваем за дорожную обстановку.
Использование педали газа
Когда водитель орудует педалью газа, система управления двигателем отрабатывает нажатие на педаль газа в процентном значении и даже небольшое кратковременное дерганье педалью приводит к подачам порций топлива для отработки желаемого ускорения, но так как автопоезд с массой 40 тонн слишком инерционен, то такие управляющие воздействия незаметны водителю, но приводят к пустой трате топлива. Ошибочно мнение, что автомобиль сглаживает волнения педали для экономии топлива.
Анти пример: Режим движения водителя по проселочной дороге за впереди идущем авто. Он едет примерно с одной скоростью но постоянно мучает педаль газа туда/сюда пытаясь держаться на одинаковом расстоянии до впереди идущего авто.
Способ реализации алгоритма: Считается количество колебаний процентов нажатия педали газа. Идеальная езда - один цикл от троганья с места до полной остановки.
1 цикл - 10,0 баллов
10 циклов - 9,0 баллов
20 циклов - 8,0 баллов
!. Циклом считается изменение нажатия педали газа на величину от 2 до 30% вниз затем вверх. Аналогия как с равномерной скоростью, только анализируем график нажатия педали газа в %.
Разгон
Процесс разгона должен происходить в зеленом секторе оборотов двигателя. Если водитель разгоняется слишком медленно - то АКПП сбрасывает повышенную передачу на 850-900 об/мин, а зеленый сектор работы турбины начинается с 1040об/мин. Если же разгонять автомобиль слишком сильно - то АКПП переключает передачи в диапазоне 1300-1650 об/мин, а это уже выходит за пределы зеленого сектора.
Способ реализации алгоритма: Считаем количество раз превышения двигателем оборотов свыше 1600 и ниже 1050 при затребованной мощности.
! Если в момент превышения мощности не было затребовано, значит это режим наката или торможения моторного тормоза.
10 раз - 10 баллов
20 раз - 9 баллов
30 раз - 8 баллов
Торможение
Тут все сложно. Важно правильно тормозить! Не только важна сила нажатие педали тормоза, но и алгоритм торможения/Замедления автомобиля, поскольку постоянное и длительное очень легкое торможение палит и перегревает колодки, и его можно заменить использованием не изнашиваемых тормозных систем (торможение оборотами двигателя/ретардер/претардер/моторный тормоз/горный тормоз) . Идеальный алгоритм торможения:
1 этап торможения это накат - 10 сек длительность использования
2 этап торможения это Моторный тормоз ступень 1 - 9 сек
3 этап торможения это Моторный тормоз ступень 2 - 8 сек
4 этап торможения это Моторный тормоз ступень 3 - 7 сек
5 этап торможения это Ретардер ступень 1 - 6 сек
6 этап торможения это Ретардер ступень 2 - 5 сек и только после этого жмем на педаль)))
7 этап торможения это Рабочий тормоз 1-30% - 4 сек
8 этап торможения это Рабочий тормоз 30-50% - 3 сек
9 этап торможения это Рабочий тормоз 50-70% - 2 сек
10 этап торможения это Рабочий тормоз 70-100% - 1 сек
!! На разных авто разное количество ступеней моторного тормоза и ретардера.
Балл за одно торможение зависит от количества ступеней, которые водитель выполнил правильно.
1-10 выполнены, то балл 10,00
2-10 выполнены, то балл 9,00
5-10 выполнены, то балл 8,00
7-10 выполнены, то балл 7,00
Остановки
Поскольку трогание с места является одним из наиболее затратных по топливу процессов (около 700 грамм топлива на разгон сцепки полной массы) при движении, количество остановок, которых можно избежать, следует по возможности сократить до минимума. Тут очень важно понимать что общее количество остановок слишком неинформативный критерий! Есть пробки, особенно их много в Европе. Есть очереди на границах, есть погрузки и выгрузки на которые водители не влияют…
Способ реализации алгоритма: Считаем количество остановок после 3 км пути. Т.е. остановки через каждые 10 метров игнорируем, это пробки/очереди/загрузки/выгрузки.
5 остановок - 10 баллов
10 остановок - 9 баллов
15 остановок - 8 баллов
Сложность трассы
Не все маршруты одинаковы и количество и процент нажатия педали тормоза при поездке в Азербайджан и в Германию очень отличается и в этом нет влияния водителя поэтому сложность трассы тоже необходимо учитывать
"Средний уклон"
"Средний вес"
"Количество положительных остановок (очереди и пробки)"
Способ реализации алгоритма:
А. Средний уклон - акселерометр
Б. Средний вес - CAN
В. Количество остановок = общее количество остановок за вычетом количество ненужных остановок из п.6
Накат
С этим параметром попроще его уже все хорошо считают. Из практики - хороший накат за рейс плавает в размере 14-16% от общего пути .
Неиспользование помощников автомобиля
В современных автомобилях много очень полезных помощников, которые водители так и норовят выключить в пути, мол мне лучше знать как ехать! К примеру рельеф местности загружен практически в каждый современный автомобиль. В Мерседесе данная система называется PPC, и автомобиль выбирает скоростной режим прохождения гор и поворотов учитывая рельеф. К примеру если после высокой горы будет сразу следовать спуск, то в конце подъема на гору машина перестанет поддерживать заданную скорость и закатится на горку на скорости 50км/ч и начнет потихоньку перекатываться горку а затем разгоняться накатом, но не всем водителям такое по душе. А еще машины теперь любят сами заранее тормозить перед поворотом)

Система РРС сама заранее сбросит скорость перед перекрестком.
Оцениваем процент пути с включенными системами
А. Режим AUTO ВКЛ (в сравнении с Manual)
Б. РРС ВКЛ
В. Слежение за разметкой ВКЛ
Г. аварийное торможение ВКЛ
Д. Режим ECONOMY вкл (в сравнении с AUTO)
Е. круиз контроль/ограничитель скорости ВКЛ (круиз + ограничитель)
Ё. Усталость водителя ВКЛ
Ж. Слежение за дорожными знаками ВКЛ
Оценка = (А+Б+0,25*В+0,25*Г+Д+Е + 0,25*Ё + 0,25 * Ж)/6
Мощностная диаграмма пути
При движении водителю необходимо избегать диапазонов высоких оборотов при низких нагрузках и диапазонов низких оборотов при высоких нагрузках . Поэтому будем контролить режимы:

Считаем секунда вне зеленого диапазона и штрафуем голубчика))) Кстати, зачастую водители чтобы сымитировать повышенный расход топлива, к примеру после установки ДУТ, кидает автомобиль на 10 передачу вместо 12 и едет весь день на 1600 оборотах при малой нагрузке. А тут мы его и подловим) А также здесь будут видны обгоны на скорости.
Вибрация от внешнего датчика вибрации на раме
Этим параметром мы будим приучать водителей бережно относиться к авто и тормозить на лежачих полицейских и ямах в колено.
Способ реализации алгоритма: Устанавливаем внешний датчик вибрации на раме и проезжаем спящий на 20 км/ч, и удар в средненькую яму на скорости 60км/ч. Смотрим показания датчика, определяемся с какой-то критической величиной и все последующие колебания свыше этого значения штрафуем
10,0 – 0 ударов за рейс
9,00 – 2 удара за рейс
8,00 – 4 удара за рейс
Внутренний акселерометр в данном случае не подойдет, т.к. спящие на скорости 60 км/ч пневмоподвеска рама+кабина глотает. А вот колеса становятся квадратными!
P.S.. В заключении нужно сказать, что, анализируя и влияя на водителей в рамках этих критериев возможно максимально минимизировать негативное влияние водителя на расход топлива. Однако не стоит забывать, что помимо стиля вождения на расход также влияет и техническое состояние транспортного средства, и в борьбе за экономию топлива необходимо должное влияние уделять также и техническому состоянию ТС.
Приведу небольшой пример: при закоревании направляющих тормозного суппорта одного из колес на ведущей оси, расход топлива за рейс Минск, РБ-Вольфсбург, Германия – Минск, РБ вырос с 24,9 до 29,2 л/100км. Наш менее опытный водитель даже не заметил ничего неладного в пути, т.к. ступица ведущей оси рассеивает тепло через бортовую и масло моста, и колесо грелось сильнее остальных, но не критично больше, а опытный водитель в следующем рейсе жаловался на слабый накат автопоезда и легкий запах паленых колодок после длительного вождения. И стоит отметить, что используемая смазка в направляющих, имеет срок службы 36 месяц, после чего она высыхает и теряет свои свойства.
Но как видим не каждый водитель способен увидеть данные тонкие проблемы, и, следовательно, человеческий фактор необходимо по максимум исключать в нашей работе!)
Самый главный вопрос – почему стоит прислушиваться к нашему мнению?
Наша компания заняла 1 место в Mercedes-Benz FleetBoard Driver’s League среди стран СНГ.
Среднегодовой расход по автопарку за 2020 год 24,6 л/100 км (14 машин, 130-140 т.км пробега на каждый грузовик, 27 водителей)
2. Данные алгоритмы не нацелены на некую коренную ломку принципов управления автомобилем в угоду экономичности. Мы используем данную методику уже более трех лет. Она позволяет оценивать навыки управления автомобилем каждого водителя в отдельности на всем протяжении пути в автоматическом режиме. За счет чего можно видеть слабых водителей, проводить с ними работу над ошибками. Водители, имеющие высокий уровень профессионализма, с первых рейсов показывают высокие баллы вождения и приличные результаты экономичности. Но как показала практика далеко не всех водителей, порой даже с приличным стажем вождения, можно отнести к профессионалам) Матерые ребята со скепсисом выслушивают все условия и говорят пффф. кого ты лечишь. и показывают уровень! ) Но с каждым годом, доля водителей со слабыми профессиональными навыками растет все больше и больше.
1 ноября 2019 года стало известно, что транспортная компания Traft в 2020 году планирует завершить работу над созданием системы оценки и рейтинга водителей грузовиков. Единая электронная база водителей и их автомобилей появится в виде виртуального паспорта, в котором будет подробно расписано их соответствие современным требованиям к перевозчику.

В Traft отметили, что перечень критериев будет довольно обширен. Среди них - соблюдение сроков подачи автомобиля и закрытия заказов, соблюдение правил ПДД, техническое состояние автомобиля, умение пользоваться трекинговыми мобильными приложениями и правильно оформлять документы, вежливость и коммуникабельность, наличие разрешения на заезд в центр, работа на погрузке и загрузке и пр. Сбор и обработка информации первоначально будут осуществляться через систему Traft-Online, однако в перспективе, по мере роста охвата системы, к ней к можно будет подключать и другие приложения, а также тахографы.
По итогам оценки водителя система будет выставлять ему итоговый балл, однако заказчики смогут указывать наиболее приоритетные для себя критерии и выбирать водителя в первую очередь по нужным параметрам.
Традиционные логистические компании с помощью электронного паспорта смогут избежать ситуаций, когда менеджеры отдают приоритет водителям на основе хороших с ними отношений, но не учитывая их профессиональные качества, считают в Traft.
Система оценки водителей работает в Traft с 2019 года. В следующем же планируется создать полноценный виртуальный паспорт с ID водителей, их данными и рейтингами, который будет доступен бизнесу по первому же запросу. Компания рассчитывает, что в течение пары лет к проекту присоединятся основные транспортные компании и индивидуальные предприниматели, а сам проект станет единой картотекой для самостоятельной проверки контрагентов и водителей по принципу Контур.Фокус или ATI.SU в логистической отрасли.
На базе паспорта водителя планируется развивать и различные программы привилегий для их владельцев – накопительные скидки на топливо или страховки, если рейтинг в категории безаварийной езды будет соответствовать повышенным показателям.
Система контроля стиля вождения и предотвращения ДТП на основе спутниковой навигации ГЛОНАСС и транспортной телематики

Система контроля стиля вождения и предотвращения ДТП на основе спутниковой навигации ГЛОНАСС и транспортной телематики – эффективный инструмент оценки водительского поведения в корпоративном автопарке, с помощью которого диспетчер может увидеть объективную оценку качества вождения подотчетного транспортного средства, как за отдельную поездку, так и за общий промежуток времени, просмотреть общие данные о стиле вождения всех машин, провести анализ работы и составить рейтинги водителей. Система позволит достоверно определить, кто из водителей бережет автомобиль и помогает своей компании снижать затраты, а кто использует транспортное средство на износ.
От стиля вождения водителя зависит очень многое. Если водитель ездит аккуратно, его стилем является спокойная езда, он соблюдает ПДД, а не резко тормозит или ускоряется, то владелец автопарка будет, конечно, в выигрыше.
От качества вождения напрямую зависят:
Уменьшение износа транспортного средства
Выгоды для корпоративного автопарка

Повышение сохранности эксплуатируемых транспортных средств (ТС)
Снижение стоимости владения ТС
Повышение безопасности – для водителя, для ТС, и для всех участников дорожного движения
Обеспечение высокой степени сохранности доставляемых грузов
Усиление контроля водителей со стороны руководства
Функциональные возможности системы оценки стиля вождения
Непрерывный сбор данных о параметрах движения ТС с использованием бортового навигационно-связного оборудования
Передача полученных данных на телематический сервер системы
Комплексная обработка всех данных по каждой поездке ТС
Оценка критериев, определяющих качество и стиль вождения с привязкой данных к каждому водителю
Выявление критичных событий (нарушений) в процессе движения ТС
Автоматическая фиксация дорожно-транспортных происшествий (ДТП)
Ручной ввод нарушений БДД
Оценка стиля вождения водителя с использованием уникальной скоринговой модели
Формирование статистических данных (оценка водителя, нарушения, ДТП) по каждой поездке
Отображение результатов анализа поездок и скоринга в облачном сервисе мониторинга транспорта ST Flagman Web®
Отображение результатов анализа поездок и скоринга в мобильном приложении для водителя и для руководителя
Сводный отчет по анализу стилей вождения водителей с учетом пробега: баллы за каждый вид нарушений; сводные баллы по БДД
Оценка стиля вождения. Скоринг
В системе заложена уникальная скоринговая модель RT-DM‛ 15 , которая позволяет получить информацию о стиле вождения водителя автопарка, о месте и текущей ситуации на дороге.

Управленческая отчетность
В облачном сервисе ST Flagman Web® реализованы сводные отчеты по анализу стилей вождения водителей с учетом пробега:
Баллы за каждый вид нарушений
Сводные баллы по БДД

Умный менеджмент. Мотивация

Детализированные отчеты
Система оценки стилей вождения позволяет формировать детализированные отчёты с результатами скоринга для каждого водителя за выбранный временной интервал.
Система оценки стиля вождения позволяет получать детализированные графические отчёты по каждой поездке и по каждому событию, зафиксированному в рамках выбранной поездки.
Реконструкция ДТП
Определение тяжести ДТП
Реконструкция (с точностью до 97%)
Бортовое навигационно-связное оборудование системы контроля стиля вождения
В системе предлагается к использованию профессиональные устройства производства навигационного холдинга СпейсТим. Терминалы устанавливаются на борт транспортного средства и отвечают всем необходимым требованиям, предъявляемым к системам оценки стиля вождения, страховой телематики и умного страхования.
Абонентский телематический ГЛОНАСС/GSM/GPS терминал. Миниатюрное устройство. Оптимальный функционал. Встроенная антенна. 4 дискретных входа. Аккумуляторная батарея. 2 SIM. CAN (FMS). CAN-LOG. Контроль топлива. Магнитный датчик вскрытия. Контроль стиля вождения. Разработчик СпейсТим

Абонентский телематический ГЛОНАСС/GSM/GPS терминал с поддержкой ЭРА-ГЛОНАСС. Максимальный функционал. Мониторинг транспорта. Контроль топлива.Оценка стиля вождения. Встроенные антенны и технология Assisted GNSS. Технология free mount. Взрывозащищённое исполнение. Технология Dead Reckoning. Поддержка Bluetooth Low Energy. Акселерометр. Гироскоп. Датчик определения аварии (по срабатыванию подушек безопасности). Соответствует требованиям ЭРА-ГЛОНАСС и страховой телематики (Европротокол, Умное страхование), E-Call. Разработчик СпейсТим
Преимущества предлагаемых моделей
Выполняют сразу несколько важных функций в технологиях оценки стиля вождения и страховой телематики: телематический терминал мониторинга транспорта, устройство ЭРА-ГЛОНАСС (Гранит-навигатор-6.18), терминал для страховой телематики (Pay-As-You-Drive), Black Box с записью 3-х мерной траектории движения
Собирают данные о стиле вождения, скорости передвижения, торможении и выполнении маневров, километраже поездок и местонахождении автомобиля
Наличие 6-D MEMS акселерометра и гироскопа позволяет точно определять курс и местоположение в пространстве
Для функционирования системы оценки стиля вождения на ТС должно быть установлено бортовое навигационно-связное оборудование (БНСО), удовлетворяющее следующим основным техническим и функциональным требованиям:
Наличие модуля спутниковой навигации (желательно многосистемного, как минимум – ГЛОНАСС/GPS)
Наличие трёхосного акселерометра, имеющего достаточную точность регистрации продольных, вертикальных и боковых ускорений
Наличие энергонезависимой памяти для записи и хранения параметров движения ТС в случае отсутствия сотовой связи
Наличие GSM-модема, осуществляющего передачу параметров движения в телематическую платформу (в режимах реального времени и апостериорно – после восстановления связи)
Передача данных по стандартизованному протоколу, поддерживаемому телематической платформой ST Matix®
Наличие встроенной аккумуляторной батареи (опционально)
Наличие датчика вскрытия корпуса (опционально)
Возможность монтажа в диагностический разъем стандарта OBD-II (опционально)
Если вы хотите внедрить систему контроля стиля вождения и соблюдения ДТП, контроля безопасного вождения на основе спутниковой навигации ГЛОНАСС и транспортной телелематики, или приобрести ГЛОНАСС оборудование с соответствующим программным обеспечением, заказать разработку ПО , то мы готовы проконсультировать вас, подобрать подходящее решение, а так же быстрый, удобный способ доставки и оплаты. Для консультации или покупки выбирайте удобный для вас способ:

Наверх

©2012-2022. СТ Технолоджи, ООО – одна из ведущих навигационных команд, российский разработчик программного обеспечения и навигационного оборудования. 20 лет работы в навигационной отрасли. Услуги спутникового мониторинга транспорта ГЛОНАСС / GPS. Транспортная безопасность. Видеонаблюдение на транспорте. Безопасный автобус. ГЛОНАСС/GPS оборудование. Системы мониторинга автотранспорта. Устройства ЭРА-ГЛОНАСС. Умный город. Умный цифровой аэропорт. Цифровая транcформация городов. Connected Car. Городская мобильность. Логистика людей и вещей. Системы оценки стиля вождения. Предиктивная диагностика, промышленный Интернет вещей (IoT). Интеллектуальные транспортные системы (ИТС). Системы управления дорожным движением. Разработка ПО под заказ. Алкозамок. Система контроля водителя. Контроль персонала
Читайте также: