
Какие силы действуют на колесо автомобиля
Скоростная характеристика двигателя определяется зависимостями эффективной мощности Ne и крутящего момента Mк от частоты вращения n коленчатого вала.
Ведущие колеса автомобиля приводят его в движение в результате возникновения силы тяги, которая возникает при приложении крутящего момента к полуосям ведущих колес со стороны трансмиссии:
где Pт – сила тяги, Н;
Mт – крутящий (тяговый) момент на ведущем колесе, Нм;
r – радиус колеса, м.
Крутящий момент на ведущих колесах зависит от величины момента, развиваемого двигателем на коленчатом валу, передаточного числа iтр трансмиссии и ее КПД – ηтр :
Сила тяги Pт на ведущих колесах может быть определена не только по формуле (1), но и с учетом скорости vi движения автомобиля на i -й передаче и развиваемой двигателем эффективной мощности Nе :
Скорость vi движения автомобиля на i -й передаче пропорциональна частоте n вращения коленчатого вала, радиусу r ведущего колеса и обратно пропорциональна передаточному числу iтр i трансмиссии на i -й передаче:
Таким образом, частота вращения n коленчатого вала является определяющим параметром для показателей эффективной мощности Nе , крутящего момента Mк и силы тяги на ведущих колесах Pт .

На рисунке 1 приведена внешняя скоростная характеристика двигателя при полностью открытой дроссельной заслонке, которая определяет предельные возможности двигателя при значениях частоты вращения коленчатого вала от nmin до nmax .
Скоростная характеристика двигателя во многом зависит от типа двигателя: чем круче кривая эффективной мощности Nе , тем большей приемистостью обладает двигатель.
Тяговая характеристика автомобиля
Тягово-скоростные свойства автомобиля удобно оценивать с помощью тяговой характеристики, т. е. зависимостью силы тяги на ведущих колесах от скорости движения на различных передачах (рис. 2).
Используя скоростную характеристику и задавая частоты вращения коленчатого вала от nmin до nmax при соответствующих значениях эффективной мощности или крутящего момента для каждой передачи по формуле (4) находят значения скорости v , а по формуле (3) находят значение тяговой силы Pт .
Число кривых на тяговой характеристике (рис. 2) соответствует числу ступеней в коробке передач.
Тяговая характеристика позволяет быстро определить максимальное значение силы тяги на ведущих колесах, которая может быть обеспечена при данной скорости движения автомобиля, поскольку она рассчитывается по наибольшей для данной частоты вращения коленчатого вала мощности двигателя. Меньшее значение силы тяги получается при недоиспользовании мощности двигателя, т. е. при неполной подаче топлива. Следовательно, с помощью тяговой характеристики можно оценить предельные тяговые возможности автомобиля в фактическом интервале скоростей его движения.
Силы и моменты, действующие на ведущие колеса
На ведущие колеса автомобиля действуют силы со стороны автомобиля (т. е. со стороны двигателя посредством агрегатов трансмиссии), а также силы со стороны дороги. Обозначим силы, действующие со стороны автомобиля, буквой Р , а со стороны дороги – буквой R (рис. 3).
Реактивные силы, действующие на колеса
Тяговый момент Мт на ведущих колесах стремится сдвинуть назад верхний слой дорожного покрытия, в результате чего со стороны дороги на ведущее колесо в зоне контакта действует противоположно направленная сила Rx – горизонтально направленная касательная реакция дороги.

Так как на автомобиле используются эластичные пневматические шины, то неизбежна частичная потеря момента Мт , поэтому продольную (горизонтальную) реакцию со стороны дороги, обеспечивающую качение колеса, можно записать как разность между силой тяги и потерями в шине:
где Рш – сила, учитывающая потери энергии в шинах ведущих колес.
Таким образом, касательная реакция дороги создает силу тяги.
Автомобиль своим весом G действует на каждое колесо, передавая усилие на дорогу, и, соответственно, вызывая нормальную реакцию дороги Rz . Следует учитывать, что при наличии на колесе крутящего момента нормальная реакция Rz прикладывается не к оси симметрии опорной площадки колеса, а на некотором расстоянии αш от нее, поскольку имеет место смещение центра давления из-за эластичности шины.
Эпюра элементарных нормальных реакций дороги, показанная на рисунке 4, объясняет причину смещения точки приложения реакции Rz . Это происходит из-за того, что нормальные реакции на переднем и заднем участках опорной площадки колеса различны по величине, так как силы, возникающие в упругом материале шины при приложении и снятии нагрузки неодинаковы.
Это объясняется действием сил внутреннего трения между взаимно перемещающимися частицами материала шины. При приложении нагрузки эти силы и силы упругости направлены в одну и ту же сторону, а при снятии – в противоположные стороны.
Боковая сила Рy значительно увеличивается при криволинейном движении автомобиля или при движении по косогору. Боковая реакция Ry со стороны дороги удерживает колеса автомобиля от бокового скольжения (заноса) при движении автомобиля поперек косогора или при выполнении маневра.
Сила тяги на ведущих колесах
Сила тяги Рт на ведущих колесах может быть определена, как отношение крутящего (тягового) момента Mт , подводимого к колесам, к их радиусу r :
При этом не учитываются затраты энергии на деформацию дорожного покрытия, трение внутри шины и силы инерции, обусловленные ускорением вращающихся масс колес и деталей трансмиссии в случае неравномерного движения.

Следует учитывать, что радиус колеса вследствие эластичности шины является переменной величиной.
Различают следующие радиусы автомобильных колес:
- статический радиус колеса rст – расстояние от поверхности дороги до оси неподвижного колеса, воспринимающего вертикальную нагрузку, обусловленную силой тяжести, действующей на автомобиль (т. е. его весом G ). Значения статического радиуса приводятся заводом-изготовителем шины в технических характеристиках;
- динамический радиус колеса rд – расстояние от поверхности дороги до оси катящегося колеса. Динамический радиус колеса во время движения может превышать его статический радиус, поскольку в результате нагрева шины давление внутри нее увеличивается.
Кроме того, под действием центробежных сил с возрастанием скорости автомобиля шина растягивается в радиальном направлении, вследствие чего динамический радиус увеличивается. Динамический радиус, также, зависит от величины вертикальной нагрузки Pz . - радиус качения колеса rк – радиус условного недеформирующегося катящегося без скольжения колеса, которое имеет с данным эластичным колесом одинаковую угловую и линейную скорости.
Радиус качения колеса определяется по формуле:
где S – путь, пройденный колесом; nк – число оборотов колеса на пути S .
Если проскальзывание колеса относительно дороги отсутствует, что характерно для ведомого колеса, то радиусы rд и rк почти равны между собой. В случае полного буксования колеса его пройденный путь будет равен нулю, и тогда (согласно приведенной выше формуле) его радиус качения тоже будет равен нулю.
В случае движения колеса юзом (скольжение без вращения) число оборотов будет равно нулю, и, соответственно, радиус качения rк будет стремиться к бесконечности.
Различают еще и свободный радиус колеса rсв , который является половиной диаметра ненагруженного колеса при отсутствии его контакта с опорной поверхностью.
На дорогах с сухим покрытием скольжение ведущих колес и изменение радиуса незначительны. Поэтому радиусы статический rст , динамический rд и качения rк при расчетах считаются одинаковыми и обозначаются буквой r .
Вращение вала автомобильного двигателя, переданное через механизмы силовой передачи, заставляет вращаться колеса, колеса катятся по дороге; оси вращения при перекатывании колес перемещаются вперед; оси так или иначе связаны с рамой и кузовом автомобиля; значит, вместе с осями перемещается и кузов, и автомобиль. Однако такого описания недостаточно. Необходимо знать, какие силы действуют на колесо. Вот они:
§ вращающий момент Мк, заставляющий колесо вращаться и создающий тяговую силу Рк
§ сила тяжести, соответствующая нагрузке на колесо Gk
§ вертикальная реакция дороги Z и горизонтальная X, действующая в направлении движения (т.е. обратном действию силы Рк).

Тяговая сила Рк (в кг) равна подводимому к колесам вращающему моменту Мк (в кгм), деленному на радиус качения колеса (в м):
Момент Мк зависит от крутящего момента двигателя Ме, передаточных чисел в системе силовой передачи и коэффициента полезного действия n силовой передачи, который для обычных автомобилей равен 0,9. Чем больше передаточные числа в коробке передач и в заднем мосту, тем больше подводимый к колесам вращающий момент:
Мк = Me*iк*i0*n кгм
где iк — передаточное число в коробке передач;
i0 — передаточное число главной передачи.
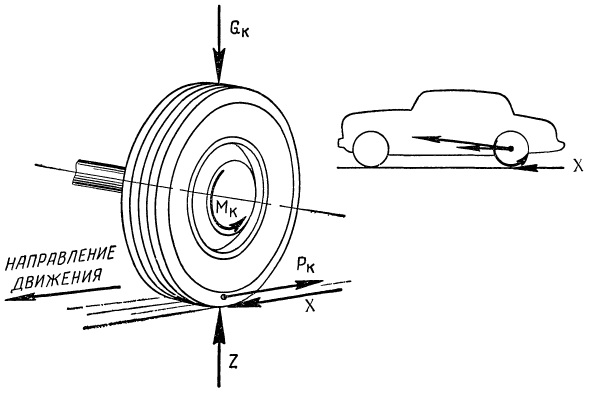
Рис. Слева — силы, действующие на колесо. Справа — дорога толкает колесо, ось перемещается вперед и толкает рессоры, рессоры толкают кузов.
Таким образом, тяговая сила на ведущих колесах автомобиля:
Рк = (Ме * iк * i0 * n) / rк, кг
Теперь можно высказать два на первый взгляд неожиданных положения:
1. Движение колеса происходит под действием силы (реакции) X, т. е. дорога толкает автомобиль. Выше был приведен пример действия силы прыгуна на площадку и силы противодействия площадки. Точно так же и ведущее колесо автомобиля отталкивает от себя назад дорогу с силой Рк, а дорога противодействует этому силой (реакцией) X. Реакция X толкает вперед колесо, а оно через ось и подвеску толкает вперед весь автомобиль.
2. В каждое отдельно взятое мгновение ближайшие к дороге точки колеса неподвижны, не перемещаются относительно поверхности дороги. Более того, если бы они перемещались, автомобиль не двигался бы, а колесо скользило бы по поверхности дороги. Происходило бы то, что называется на языке автомобилистов буксованием колеса.
Чтобы точки контакта колеса с дорогой были неподвижными, требуется хорошее сцепление шины с поверхностью дороги.

Рис. Величина коэффициента сцепления зависит от состояния поверхности дороги.
Коэффициент сцепления равен отношению наибольшей величины реакции X (при проскальзывании, буксовании колеса) к величине реакции Z:
Величина коэффициента сцепления Ф колеблется в пределах 0,5—0,8 для сухих твердых дорог и 0,15—0,4 для обледенелых или мокрых. Из приведенного графика видно, как влияет состояние поверхности асфальтовой дороги на коэффициент сцепления.
Коэффициент сцепления на сухой дороге лишь незначительно изменяется в зависимости от изменений нагрузки на колесо, давления в шине и скорости движения, но на мокрой или обледенелой дороге с увеличением скорости происходит резкое уменьшение коэффициента сцепления, так как шина не успевает выдавливать влагу, находящуюся в области контакта шины с дорогой, и остающаяся пленка влаги облегчает скольжение шины.
Необходимое для движения сцепление шины с дорогой связано с нежелательным трением. Но о каком трении может идти речь, если соприкасающиеся точки неподвижны? При внимательном изучении ближайшего к поверхности дороги участка шины видим, что:
1. шина сжимается, деформируется; происходит местное сжатие, а затем снова расширение шины; сжатие и расширение содержащегося в камере шины воздуха, взаимное перемещение частиц резины и частиц воздуха вызывает трение между ними;
2. к точке контакта шины с дорогой все время подходят сжатые элементы шины, а от точки отрыва шины от дороги отходят, наоборот, растянутые; так как резина эластична и прочна, шина не разрывается, а только сжимается и растягивается в области контакта ее с дорогой, поэтому происходит некоторое скольжение отдельных частиц шины по поверхности дороги и, как следствие, трение;

3. в углублениях поверхности дороги и рисунка протектора находится воздух; набегая на дорогу, участки протектора сплющиваются, резина заполняет углубления, выжимает из них воздух и как бы присасывается к поверхности дороги, и на отрыв шины от дороги требуется затрата дополнительной силы.

Рис. Работа колеса вызывает деформацию (изменение формы) шины.
Нетрудно сделать вывод, что описанные явления трения или сопротивления качению должны усиливаться при понижении давления в шине (так как при этом увеличиваются ее деформации) и при возрастании окружной скорости шины, а также при неровной или шероховатой поверхности дороги и при наличии заметных выступов и углублений в рисунке протектора шины.
При движении автомобиля по дороге в зоне контакта шины колеса с дорожным покрытием возникают динамические вертикальные, продольные и поперечные касательные силы, значение которых зависит от типа автомобиля, шины колеса, нагрузки, природно-климатических условий и т. п.
На стоящее колесо действует только одна сила - вес автомобиля, приходящийся на это колесо. Особенностью автомобильного колеса является его эластичность. Под действием вертикальной силы колесо деформируется (рис. 1, а), в месте контакта радиус колеса меньше, чем в других частях колеса, не соприкасающихся с дорожным покрытием.
Площадь следа колеса F меняется в пределах 0,250. 0,100 м 2 . Для одного и того же автомобиля значение F зависит от нагрузки на колесо:


где - вес автомобиля, приходящегося на колесо, Н;

- давление воздуха в шине, Па.
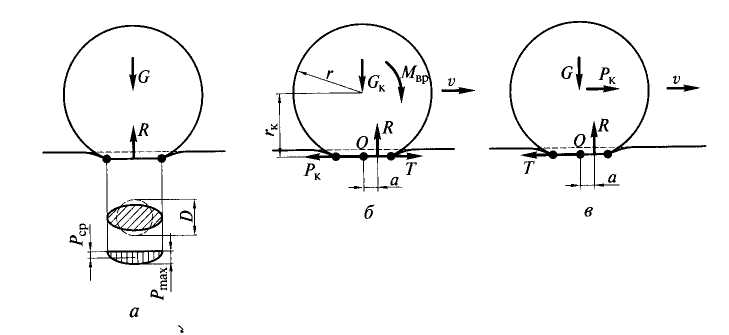
Рис. 1. Схема сил, действующих на дорожное покрытие:
а – стоящее колесо; б – ведущее колесо; в – ведомое колесо; – размер пятна контакта колеса с дорожным покрытием; , - соответственно средний и максимальный прогиб дорожного полотна; - вес автомобиля; - сила реакции; - вес автомобиля, приходящийся на колесо; - вращающий момент; Т - сила трения; - расстояние от центра колеса до поверхности дорожного покрытия; - радиус колеса; - расстояние от мгновенного центра скоростей О до линии действия силы реакции ; - окружная сила; - скорость движения автомобиля
Значение не должно превышать 0,65 МПа на дорогах I - II категорий и 0,55 МПа на дорогах III - V категорий.
Различают площадь отпечатка колеса по контуру в форме эллипса (рис. 1, а) и по выступам рисунка протектора. При определении среднего давления в расчет принимают площадь отпечатка по выступам протектора. При расчете дорожной одежды для вычисления условно принимают площадь отпечатка в виде круга диаметром , м, равновеликую площади эллипса:


В большинстве автомобилей имеются ведущие и ведомые колеса. К ведущим колесам подается вращающий момент , Нм, от двигателя автомобиля:


где - вращающий момент на коленчатом валу двигателя, Нм;

- передаточное число коробки передач;

- передаточное число главной передачи;

- коэффициент полезного действия главной передачи (трансмиссии).
Действие вращающего момента вызывает появление в зоне контакта окружной силы , направленной в сторону, обратную движению (рис. 1, б). Сила вызывает горизонтальную силу реакции Т, представляющую собой силу трения в плоскости контакта колеса с дорожным покрытием, при этом = .
При действии вертикальной силы возникает сила реакции , которая смещается вперед на расстоянии по ходу движения автомобиля. Значение - составляет для грузовых автомобилей - , для легковых - , где - общий вес автомобиля, Н.
На ведомое колесо (рис. 1, в) действует сила тяги. Горизонтальная реакция = направлена в сторону, противоположную движению. Вертикальная сила реакции так же, как и в случае ведущего колеса, смещена по ходу движения.
Вращающий момент может быть определен также с учетом окружной силы , Н, и радиуса качения пневматического колеса , м:


где λ - коэффициент уменьшения радиуса колеса в зависимости от жесткости шин, λ = 0,93. 0,96;

- радиус недеформированного колеса, м.
В точке 0 (мгновенном центре скоростей) приложена сила трения (сцепления) колеса с поверхностью дороги. Можно записать:

где - расстояние от мгновенного центра скоростей до точки приложения силы реакции . Откуда:




Для ведомого колеса можно записать:



где - сила сопротивления качению, Н;

– коэффициент сопротивления качению.
Коэффициент сопротивления качению возрастает с увеличением скорости движения, так как кинетическая энергия колеса при наездах на неровности прямо пропорциональна квадрату скорости качения. Практически значение остается постоянным до скорости движения 50 км/ч для определенного типа дорожного покрытия:
| Тип дорожного покрытия | |
| Цементобетонное и асфальтобетонное | 0,01…0,02 |
| Щебеночное, обработанное вяжущим материалом | 0,02…0,025 |
| Щебеночное, не обработанное вяжущим материалом | 0,03…0,04 |
| Ровная сухая грунтовая дорога | 0,03…0,06 |
При скорости движения более 50 км/ч коэффициент сопротивления качению определяют по формуле:


где - скорость движения автомобиля, км/ч;
– коэффициент сопротивления качению при скорости движения до 50 км/ч.
Движение автомобиля возможно при условии:

Сила трения достигает наибольшего значения, когда:


где - нагрузка на ведущее колесо (сцепной вес), Н;

- коэффициент сцепления.
При прохождении автомобилем поворота возникающая боковая сила Ру действует на весь автомобиль, в том числе и на колеса, которые находятся в контакте с дорогой. Поскольку колеса снабжены эластичными шинами, то боковая сила Ру вызовет деформацию шин в зоне контакта колес с дорогой.

Допустим, что к оси равномерно и прямолинейно катящегося колеса приложена боковая сила, перпендикулярная плоскости его качения (рис. 1). Под действием этой силы в плоскости дороги возникает равная ей боковая реакция Rу . В результате совместного действия сил Ру (приложенной к центру тяжести автомобиля) и Rу (приложенной в зоне контакта колес с дорогой) происходит деформация упругой шины. Деформируется и беговая дорожка.
Если бы не было деформации шины, то беговая дорожка оставляла бы на плоскости качения колеса прямолинейный след аб , являющийся линией пересечения плоскости качения колеса с плоскостью дороги. Однако в результате боковой деформации шины точки следа получают смещение, и линия следа аб будет наклонена к линии аб под некоторым углом δув , называемым углом увода .
Отклонение вектора скорости эластичного колеса от плоскости его вращения при действии любой по величине боковой силы называется боковым уводом (или просто уводом), а угол между этим вектором и плоскостью вращения колеса – углом увода.
Боковая сила, вызывающая увод, может быть связана с углом увода соотношением:
где kув – коэффициент сопротивления уводу, показывающий какую по величине поперечную силу надо приложить к колесу, чтобы оно катилось с углом увода, равным 1 рад.
Для малых углов увода (до 6˚) коэффициент kув приближенно можно считать постоянным. Для легковых автомобилей kу изменяется от 15 до 40 Н/рад, а для грузовых автомобилей и автобусов – от 30 до 100 Н/рад.
Коэффициент kув можно считать постоянным лишь приближенно. Увеличение вертикальной нагрузки и давления воздуха в шинах сопровождается повышением сопротивления уводу.
При возникновении увода происходит деформация шины в радиальном и поперечном направлении, в результате чего возрастает внутреннее трение в шине. При дальнейшем увеличении углов увода начинается скольжение протектора по дороге. Результатом этого является то, что сила, необходимая для качения колеса с уводом должна быть больше, чем для его качения без увода.
Увод колеса без скольжения по дороге возможен лишь до тех пор, пока боковая сила Ру , приложенная к колесу, не превысит его сцепные возможности.
Поворачиваемость автомобиля
Свойство автомобиля изменять направление движения без поворота управляемых колес называется поворачиваемостью автомобиля. Поворачиваемость проявляется в результате бокового увода колес вследствие эластичности шин или поперечного крена кузова вследствие эластичности упругих элементов подвески. Поэтому различают поворачиваемость шинную и креновую.

Если в автомобиле с жесткими шинами центр поворота находится в точке О (рис. 2) пересечения продолжения осей передних и задних колес, то у автомобиля с эластичными шинами центр поворота будет находиться в точке О1 пересечения перпендикуляров к векторам скоростей v1 и v2 переднего и заднего мостов. Тогда можно записать:
где δ1 и δ2 – углы увода соответственно переднего и заднего мостов;
ρэ – радиус поворота автомобиля с эластичными шинами;
L – база автомобиля.
Так как углы θ , δ1 и δ2 обычно невелики, то можно записать:
Для автомобиля с жесткими шинами углы увода равны нулю: δ1 = δ2 = 0, и для радиуса поворота справедлива формула:
где ρ – радиус поворота автомобиля с жесткими шинами.
Таким образом, траектория движения автомобиля с жесткими шинами зависит только от угла θ поворота управляемых колес. У автомобиля с эластичными шинами на нее влияют углы δ1 и δ2 . Кривизна траектории зависит от соотношения углов δ1 и δ2 .
Если δ1 = δ2 , то это называется нейтральной поворачиваемостью .
При этом, согласно формуле (3) ρэ = ρ , однако траектория движения автомобиля с эластичными шинами не совпадает с траекторией движения автомобиля, имеющего нейтральную поворачиваемость, так как центры поворота в этих случаях занимают разные положения.

При действии поперечной силы на автомобиль с жесткими шинами он будет сохранять свое прежнее направление движения, пока обеспечивается его устойчивость по сцеплению колес с дорогой. Автомобиль же на эластичных шинах с нейтральной поворачиваемостью при действии боковой силы будет двигаться прямолинейно под углом δув к прежнему направлению движения.
Если δ1 > δ2 , то ρэ < ρ (рис. 3, б), и для движения автомобиля с эластичными шинами по кривой радиусом ρ управляемые колеса нужно повернуть на больший угол, чем при жестких шинах.
В этом случае имеет место недостаточная поворачиваемость .
Если δ1 < δ2 , то ρэ > ρ (рис. 3, в), и для движения автомобиля с эластичными шинами по кривой радиусом ρ управляемые колеса нужно повернуть на угол, меньший, чем при жестких шинах, т. е. наблюдается излишняя поворачиваемость .
Чтобы понять влияние различных видов поворачиваемости на устойчивость автомобиля, рассмотрим воздействие на автомобиль боковой силы Ру в случае, когда угол поворота управляемых колес равен нулю: θ = 0.
В случае нейтральной поворачиваемости (рис. 3, а) автомобиль будет двигаться под углом δув = δ1 = δ2 к траектории своего прежнего движения.
В случае недостаточной поворачиваемости (рис. 3, б) в результате того, что углы уводов переднего и заднего мостов различны, будет действовать центробежная сила Рц из центра О1 поворота автомобиля, при чем она будет направлена в противоположную сторону возмущающей боковой силе Ру , что уменьшит ее и, как следствие, произойдет увод колес.
Следовательно, автомобиль с недостаточной поворачиваемостью устойчиво сохраняет прямолинейное движение.
В случае излишней поворачиваемости (рис. 3, в) будет действовать центробежная сила из центра поворота О1 , но в данном случае ее направление будет совпадать с направлением боковой силы Ру , что вызовет еще больший увод колес с изменением траектории движения. Поэтому автомобиль с излишней поворачиваемостью менее управляем и хуже сохраняет направление движения, чем автомобиль с недостаточной поворачиваемостью.
Креновая поворачиваемость автомобиля зависит от конструкции подвески. На рис. 4 показан задний мост с подвеской на листовых полуэллиптических рессорах, который поворачивает направо. Передние концы рессор соединены с кузовом простым шарниром, а задние – при помощи серьги.

Под действием поперечной силы Ру кузов автомобиля наклоняется, вызывая сжатие левых рессор и распрямление правых. Левая рессора, сжимаясь, перемещает задний мост назад (в точку А ), а правая распрямляясь перемещает его вперед (в точку В ). В результате задний мост поворачивается в горизонтальной плоскости.
Если вследствие крена углы поворота переднего и заднего мостов неодинаковы по величине и направлению, то автомобиль поворачивает, хотя передние колеса относительно балки моста не повернуты. Так, при действии одной и той же силы Ру один автомобиль (рис. 5, а) повернет вправо, а второй автомобиль (рис. 5, б) – влево.
Возникающая при повороте центробежная сила Рц у первого автомобиля направлена противоположно возмущающей силе Ру , а у второго автомобиля – в ту же сторону, что и Ру . Поэтому первый автомобиль лучше сохраняет направление движения под действием поперечных возмущающих сил.
По аналогии с шинной поворачиваемостью можно сказать, что первый автомобиль имеет недостаточную поворачиваемость, а второй автомобиль – излишнюю креновую поворачиваемость.

У автомобиля с излишней креновой поворачиваемостью при действии поперечной силы кривизна траектории непрерывно увеличивается. Это приводит к росту центробежной силы и дальнейшему уменьшению радиуса поворота. Однако максимальное значение угла поперечного крена обычно ограничивается упорами, предусмотренными конструкцией подвески.
Креновая поворачиваемость связана с шинной поворачиваемостью, так как увод колеса возникает не только под действием моментов, но и при наклоне колеса к вертикали (развале).
Если направление поперечной силы совпадает с направлением развала, то увод возрастает. Один градус развала вызывает увод в 10…20 градусов.
У автомобилей с независимой подвеской на поперечных рычагах крен кузова вызывает изменение развала.
При двухрычажной подвеске колеса наклоняются в сторону крена кузова и направления поперечной силы, что увеличивает общий увод моста.
При однорычажной подвеске колеса наклоняются в сторону, противоположную крену кузова и навстречу поперечной силе, при этом общий увод моста уменьшается.
Так как автомобиль, имеющий недостаточную поворачиваемость, обладает большей устойчивостью, то при его конструировании и эксплуатации стремятся обеспечить именно недостаточную поворачиваемость. Поэтому у легковых автомобилей наиболее распространена подвеска на двух рычагах. Заднюю подвеску выполняют зависимой или же независимой на одном поперечном рычаге.
Если сделать наоборот (впереди установить зависимую, а сзади двухрычажную независимую подвеску), то это приведет к резкому ухудшению управляемости автомобиля.
При эксплуатации для сохранения недостаточной поворачиваемости автомобиля при перевозке грузов их размещают так, чтобы их центр тяжести находился ближе к передней оси автомобиля.
Во всех случаях давление воздуха в шинах колес передней оси поддерживают ниже, чем в задних шинах, а в случае вынужденного использования шин разной конструкции следует более жесткие шины устанавливать на заднюю ось, а менее жесткие – спереди.
Автомобиль с излишней поворачиваемостью может вообще потерять управляемость. Из формулы (3) получим:
При прямолинейном движении автомобиля δ1 = δ2 = θ = 0, ρэ = ∞ и обе части уравнения (3) равны нулю.
Если на автомобиль кратковременно подействует боковая сила (например, порыв ветра), то возникает большой увод колес. В этом случае в уравнении (3) δ1 > 0, δ2 > 0 и δ2 > δ1 (автомобиль имеет излишнюю поворачиваемость), θ = 0, следовательно,
т. е. автомобиль начнет поворачивать по дуге радиусом ρэ , и возникнет центробежная сила Рц , которая будет поддерживать колеса в состоянии увода и после прекращения действия исходной возмущающей силы (в данном случае – порыв ветра).

Допустим, что сила Рц параллельна силам боковых реакций Rу1 и Rу2 дороги на колеса автомобиля. Такое допущение основывается на том, что после возникновения центробежная сила Рц и радиус поворота ρэ достаточно велик.
Тогда из уравнения равновесия автомобиля следует (рис. 6)
Центробежная сила Рц и боковые силы Ру1 , Ру2 действуют на колеса со стороны балок мостов, вызывая увод шин:
На основании отношения (1) и с учетом уравнений (5) и (6) получим:
где kув1 и kув2 – коэффициенты сопротивления боковому уводу шин переднего и заднего мостов соответственно.
Из полученных уравнение следует, что при повышении скорости движения углы увода возрастают, причем угол δ2 растет быстрее угла δ1 . Это вызывает уменьшение правой части выражения (5), которая при определенной так называемой критической скорости vув оказывается равной нулю. При этой скорости автомобиль может двигаться криволинейно, хотя его управляемые колеса находятся в нейтральном положении.
Если скорость больше vув , то ( δ2 – δ1 ) > L/ρэ и угол θ становится отрицательным.
Это означает, что для поворота вправо передние колеса следует повернуть влево.
Таким образом, автомобиль с излишней поворачиваемостью теряет управляемость, если его скорость больше критической.
Из выражений (5), (7) и (8) определяется критическая скорость автомобиля по условиям управляемости:
У автомобилей с недостаточной или нейтральной поворачиваемостью критическая скорость vув отсутствует, так как при δ2 < δ1 подкоренное выражение отрицательно, а при δ2 = δ1 оно равно бесконечности.
Читайте также: