
Что такое стартер и ротор электродвигателя
Благодаря техническому прогрессу на современных производствах внедряются новые виды электропривода. Например, асинхронные двигатели с КЗ ротором с частотным преобразователем постепенно заменяют АДФР и ДПТ. Но есть машины, которые благодаря своим характеристикам продолжают эксплуатироваться — это синхронные двигатели, о них и пойдёт речь в этой статье.
Что такое синхронные машины и где их используют
В общем смысле синхронная электрическая машина — это машина, ротор которой вращается с такой же частотой, как и магнитное поле статора.
Если говорить о двигателе, то частота вращения его ротора совпадает с частотой вращения поля статора, порождаемого током питающей сети. То есть ротор вращается синхронно с этим полем отсюда и название - синхронный двигатель.
Синхронные машины обратимы — то есть могут работать и в режиме генератора, и в режиме двигателя. Поэтому в ходе статьи иногда могут проскакивать фазы не только о двигателях, но и о генераторах, их устройство почти одинаковое, а главное, отличие — в режиме работы.
Стоит отметить, что на электростанциях всех типов используются в основном синхронные генераторы. Они и вырабатывают практически всю электроэнергию в мире, а мощность таких генераторов может доходить до тысячи мегаватт, а в некоторых случаях и более.
Синхронные двигатели (СД) используются зачастую там, где нужна большая мощность (сотни и тысячи киловатт) для привода в движение различных механизмов и устройств, например, компрессоров, насосов, мельниц и другого оборудования, не требующего регулировки частоты вращения и частых пусков/остановок.
У синхронного двигателя три отличительных особенности:
1. Постоянная скорость на валу при любых нагрузках (в пределах номинальной). При этом скорость вращения ротора СД равна скорости вращения магнитного поля статора.
2. Изменяя ток возбуждения, возможно регулировать коэффициент мощности. Так в режиме перевозбуждения синхронный двигатель работает как компенсатор (генератор) реактивной мощности, улучшая общий cos Ф сети.
Из последнего ясно, почему его применяют для привода в движение устройств большой мощности, ведь использование асинхронных двигателей приведёт к ухудшению cos Ф, следовательно, и к увеличению нагрузки на сеть и счётов за электроэнергию.
Устройство
Как любой другой двигатель, синхронный состоит из статора и ротора.
Статор – это неподвижная часть машины, состоящая из корпуса и шихтованного сердечника. Шихтованный — значит, собран из тонких листов , изолированных друг от друга лаком или окалиной. В сердечнике есть пазы, в которые укладывается трёхфазная обмотка. То есть устройство статора синхронной машины такое же, как и у асинхронной.
В зависимости от габаритов машины статоры бывают разных конструкций — в виде цельного цилиндра, или набранным из сегментов, которые при сборке образуют цилиндр. Корпуса статоров мощных машин большого диаметра выполняют разъёмными из двух частей (разделяются пополам вдоль оси ротора), что облегчает транспортировку, монтаж и ремонт таких машин. У небольших машин корпуса выполняют цельными и в них запрессовывают статор.
Ротор – это вращающаяся часть электрической машины. Так как для работы любой синхронной машине нужно возбуждение, то на роторе располагается сердечник с обмоткой возбуждения или магниты. Сердечник и ротор могут быть выполнены в виде одной цельной детали или сборными.
У синхронных машин бывают роторы двух видов: неявнополюсным и явнополюсным.
Конструкция ротора: а) явнополюсный с одной парой полюсов; б) неявнополюсная; 1 — магнитопровод, 2 — полюса, 3 — обмотка возбуждения, 4 — контактные кольца, 5 — электрические;
Конструкция ротора: а) явнополюсный с одной парой полюсов; б) неявнополюсная; 1 — магнитопровод, 2 — полюса, 3 — обмотка возбуждения, 4 — контактные кольца, 5 — электрические;
Неявнополюсный ротор выполняется в виде стального цилиндра с продольно профезерованными пазами, в которые укладывается обмотка возбуждения. Может быть изготовлен в виде одной кованной детали с валом или сборным — в виде отдельной детали, напрессованной на вал. Чтобы во время работы обмотка не повредилась под действием центробежной силы, концы ротора прикрывают стальными бандажными кольцами из немагнитной стали.
У явнополюсного ротора обмотки расположены на полюсах сердечника, как бы выступающих над поверхностью ротора. В этом случае каждый полюс выполняется в виде отдельного элемента, который состоит из сердечника, катушки и полюсного наконечника. Сами полюсы крепятся, например, с помощью ласточкиного хвоста, на ободе, установленном на валу.
В зависимости от мощности машины и частоты вращения, используют один или другой тип ротора. В тихоходных машинах (до 1000 об/мин) используют явнополюсную конструкцию ротора. Поэтому у явнополюсных роторов зачастую много полюсов, подобно тому, что вы видите на рисунке выше.
При работе машин с большим числом оборотов (1500-3000 об/мин) на ротор действуют значительные центробежные силы, поэтому применяют неявнополюсный ротор. При этом неявнополюсный ротор может быть двухполюсным (при n 1=3000 об/мин) или четырёхполюсным (n 1=1500 об/мин)
Концы обмотки возбуждения выводятся на два токосъёмных кольца, а ток на них подаётся через щётки.
Возбуждение синхронных машин
Для работы синхронной машины на роторе должен быть расположен источник магнитодвижущей силы (МДС). Если это генератор, то магнитное поле ротора сцепляется с обмотками статора и наводит в них ЭДС, а у двигателя магнитные поля ротора и статора взаимодействуют друг с другом и ротор увлекается вслед за полем статора.
По способу возбуждения различают синхронные машины с обмоткой возбуждения и с постоянными магнитами.
При этом чаще встречаются машины с обмоткой возбуждением, или как его ещё называют — с электромагнитным возбуждением. Здесь при прохождении постоянного тока через обмотку и возникает МДС возбуждения, которое наводит магнитное поле в магнитной системе машины. А устройство, которое питает обмотку возбуждения, называют возбудителем (В).
Раньше для возбуждения синхронных машин использовались генераторы постоянного тока с самовозбуждением или с независимым возбуждением. Во втором случае для работы возбудителя нужно было подать ток и в его обмотку возбуждения. Для этого использовался ещё один генератор постоянного тока, но параллельного возбуждения — подвозбудитель (ПВ).
То есть ротор синхронной машины, якорь возбудителя и подвозбудитель располагаются на общем валу (или их валы соединяются непосредственно друг с другом) и вращаются одновременно, а подвозбудитель питает обмотку возбуждения возбудителя, чтобы тот мог выдавать ток в обмотку возбуждения синхронной машины. Для регулировки тока возбуждения используют регулировочные реостаты в цепи возбудителя r1 и подвозбудителя r2. Схема изображена на рисунке ниже под буквой а.
Чтобы снизить частоту обслуживания, повысить КПД и надёжность от такой системы отказались и перешли на тиристорные преобразователи, в нашей стране распространены преобразователи типа ТЕ320/45, ТЕ320/75 способные выдавать ток возбуждения до 320 ампер с напряжением 45 и 75 вольт соответственно, а также различные ВТЕ. Они подключаются к питающей сети, выпрямляют и регулируют ток, подаваемый на обмотку возбуждения, при этом возможна автоматическая или ручная регулировка тока. Способ регулировки в большей мере определяется мощностью машины и режимом её работы. КПД повышается за счёт снижения потерь при работе генераторов, отсутствии регулировочных реостатов.
Так как якорь возбудителя располагается на валу синхронной машины и вращается вместе с её обмоткой возбуждения, то возможно соединить их между собой непосредственно друг с другом без щёток.
Но возбудитель – это генератор переменного тока, а для возбуждения синхронных машин нужен постоянный. Для преобразования переменного тока в постоянный на валу располагается полупроводниковый выпрямитель (3), на вход которого подаётся ток обмотки якоря возбудителя, а его выход подключается к обмотке возбуждения синхронной машины.
На обмотку статора возбудителя подаётся постоянный ток от подвозбудителя (генератора) или от электронного преобразователя. В этом случае чтобы регулировать силу тока возбуждения синхронной машины изменяют ток статора возбудителя.
Преимущество такой системы в том, что она надёжна и её почти не нужно обслуживать, ведь при питании возбудителя от электронного преобразователя в системе полностью отсутствуют щётки. Перечисленные системы возбуждения используются как в генераторах, так и в двигателях.
Интересно, что на возбуждение затрачивается мощность в пределах 0,2…5% от полезной мощности машины, при этом у более мощных машин на возбуждение в процентном соотношении затрачивается меньшая мощность. А в машинах с постоянными магнитами мощность на возбуждение не затрачивается.
Кстати, насчёт постоянных магнитов — они используются в машинах малой мощности (до единиц киловатт), конструкция машины в этом случае упрощается и становится дешевле. Но не нашла широкого распространения в синхронных двигателях большой мощности из-за того, что мощные магниты стоят дорога, а материалы для них были в дефиците, и сложны в обработке материалов для постоянных магнитов.
Однако сейчас практически повсеместно используют мощные неодимовые магниты, они нашли применения в различных бесщёточных двигателях (BLDC ), которые используются в качестве привода в электротранспорте. Кстати, эти двигатели в целом похожи на синхронные, а одна из их разновидностей так и называется permanent magnet synchronous motor (PMSM) — синхронный двигатель с постоянными магнитами.
Особенности и принцип действия
Обмотки статора синхронного двигателя подключают к трёхфазной электросети, а на обмотку ротора подают постоянный ток от возбудителя. Но из-за большой инерционности ротор синхронного двигателя не может мгновенно развить своей скорости, он в принципе не может развернуться самостоятельно, так как пусковой момент у него отсутствует.
Поэтому для запуска двигателя используют такие способы его разгона до синхронной скорости:
1. Разгон с помощью вспомогательного двигателя.
2. Асинхронный пуск.
Один из самых распространённых способов – это асинхронный пуск. В этом случае на роторе синхронного двигателя, кроме обмотки возбуждения, должна быть расположена ещё и короткозамкнутая обмотка, как на АДКР.
Вокруг нас становится всё больше электродвигателей . Вместе с безнадежным устареванием бензиновых агрегатов в мире транспорта, появляются и принципиально новые сферы использования электродвигателей. Многие высокотехнологичные электронные устройства используют такие двигатели для самых различных целей, например чтобы реализовать работу вибровызова у смартфона.
Полезно и интересно разобраться в логике функционирования этого нехитрого, но крайне востребованного сегодня устройства . Давайте опустим все сложные высказывания и формулировки, а попробуем на простом языке сформулировать основы функционирования электрических агрегатов.
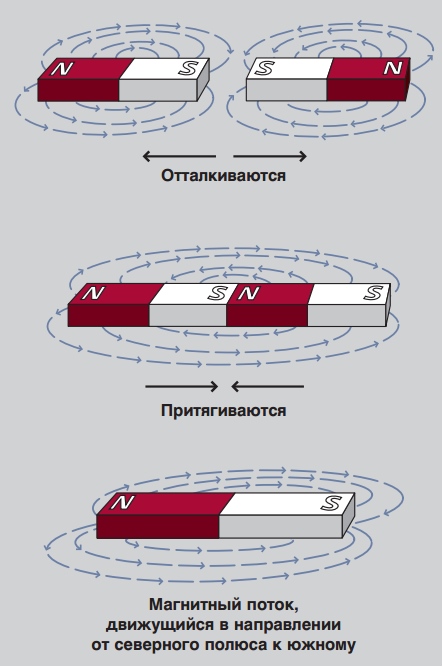
Начнем с самого простого. Наверняка каждый из читателей игрался с магнитиками и обращал внимание, что в одну сторону магниты притягиваются, а в другую сторону магниты отталкиваются. Говоря научным языком - полюса магнита, имеющие одинаковые знаки, отталкиваются, а полюса магнита с разными знаками притягиваются .
Причину этого явления объясняют спецификой поведения зарядов . Но полностью объяснить природу взаимодействия пока не получилось. Да нам и не нужно сейчас это делать. Для нас важен сам факт подобного явления. Обратите внимание, что отталкиваются магниты гораздо раньше, чем будут подведены друг к другу вплотную. Всё дело в линиях магнитной индукции.
Теперь представим, что мы разместили магнитики таким образом, когда возможно использовать эту силу отталкивания нам во благо . Один магнитик поместили на ось, а второй поставили где то рядом. Вектора действующих сил распихали таким образом, что они по касательной толкают ось и заставляют её крутиться. Получилось, что система будет вращаться при правильном подборе точек расположения магнитов . Эффект напоминает раскручивание карусели, на котором катаются дети. Когда карусель с ребенком проходим мимо папы, он подкручивает систему и поддерживает вращение. Замени мы папу одним магнитом, а ребенка другим того же полюса - выйдет модель электродвигателя .
Может сложиться неправильное представление, что мы получили вечный двигатель. На самом деле это не так. Мы не сможем без прочих ухищрений заставить эту систему работать постоянно из-за потери энергии на сторонние факторы.
Теперь представим, что нам нужно управлять такой моделью . Ведь когда магниты постоянные, мы не сможем регулировать процесс вращения. Да и оптимизировать его не получится. Поэтому, мы прибегнем к помощи электромагнита . Электромагнит может создавать поле тогда, когда нам это нужно. Нажали на кнопочку - ток проходит через цепь и формируется магнитное поле.
Но в более простом случае рационально использовать рамку с током. Там начинает работать закон Ампера , а род взаимодействия будет таким же. Вспомним, что закон Ампера описывает влияние магнитного поля на проводник с током. Он описывает силу, которая будет действовать на проводник с током со стороны магнитного поля.
Теперь представим, что мы взяли рамку с током и поместили её в магнитное поле . Рамка с током представляет собой проводник, который оказался в магнитном поле. Пропускаем через рамку ток и поле начинает воздействовать с некоторой силой на этот проводник . Если рамка замкнутая, то ток меняет в ней свой направление.
Получается, что на рамке формируется вращающий момент . Ведь когда направление тока в проводнике меняется, меняется и направление вектора силы, воздействующей со стороны магнитного поля.
Если разместить рамку правильно, то появится именно крутящий момент. Если нет - поле будет гнуть рамку. Наша задача "снять" крутящий момент. Для этого рамку нужно правильно расположить или увеличить количество рамок. Тогда одна из них обязательно попадет в нужное положение.
Кстати, это магнитное поле формируется неподвижными постоянными магнитами статора двигателя .
Вращающаяся часть будет называться ротором или якорем . Неподвижная на корпусе - статором. Приведенная модель является рабочей моделью двигателя постоянного тока . В реальной схеме всё организовано точно также, только якорь имеет множество таких рамок внутри своей конструкции. Полезно прочитать эту статью .
Но есть одно несчастье. Подключи мы такую модель к источнику переменного напряжения , и получим не равномерное движение, а постоянные рывки. Всё дело в том, что переменный ток постоянно меняет своё направление .
Направление сил, воздействующих на ротор, тоже будет меняться.
В случае с электродвигателями переменного тока конструкция строится немного иначе .
Обмотка располагается не на роторе, а на статоре. Пропуская через обмотку статора электрический ток, мы получим пульсирующее магнитное поле . Ток, как и в примере выше, меняет своё направление. Ведь намотка выполнена тоже как рамка. И потому актуальна картинка про смену направления электрического тока. Магнитное поле тоже будет направлено в разные стороны .
Если в такое поле поместить магнитик или ротор особой конфигурации (колесо для грызуна, в котором индуцируется ток сам) опять получим описываемый ранее эффект и крутящий момент . Только обмоток нужно много, чтобы "толкались" они одна за другой. Тогда оно будет пульсировать и подпихивать наш якорь. Получили опять вращающий момент. Вуаля!
Для чего вообще написана эта статья? А дело в том, что в дальнейшем, в моих следующих статьях мы будем подключать различные типы двигателей в качестве исполнительных устройств к драйверам и контроллерам. "Мозгом" всего этого, конечно будет ESP8266. И для этого мы должны знать, а на что они, эти двигатели вообще способны и как ими управлять. Какой двигатель нам нужен в данном конкретном случае. Сразу скажу, наша классификация будет отличатся от классической (незначительно), так как нас интересует практика, а не теория. Ну а начнем как всегда с определения.
Определение
Электродвигатель - устройство с помощью которой электрическая энергия преобразуется в механическую, чаще всего во вращательное движение, но бывают и другие двигатели. И все же в 90% случаев имеются в виду вращающиеся двигатели.
Принцип действия
Лежит принцип электромагнитной индукции это, напомню, возникновение электрического поля (тока) под действием изменяющегося магнитного. Или другими словами изменяющиеся, магнитное поле порождает электрическое и наоборот. Поэтому любое изменяющиеся электрическое поле (а там где ток там и поле) породит магнитное, а оно при взаимодействие с "другим" магнитным полем вызовет отталкивание или притягивания элементов ротора и статора, а вот количество реализаций всего этого может быть огромное количество о чем и будет рассказано ниже.
Конструкция электродвигателя
Основными компонентами вращающегося электродвигателя являются две части статор и ротор.
- статор - неподвижная часть,
- ротор - вращающаяся часть.
Да и насчет якоря, с ним путаница. Якорем называется обмотка по которой протекает ток при работе (для работы) двигателя, он может быть и подвижным и не подвижным, а значит как статором так и ротором. Часто якорем называют подвижную часть во многих электромагнитных приборах. Но вот в синхронной машине, что назвать якорем я честно не знаю.
Классификация
Классификация большая, путанная и многообразная, но она нас будет интересовать с практической точки зрения.
По типу питающего тока двигатели делятся на:
- переменного тока;
- постоянного тока;
- универсальные двигатели
Ну это самое простое, скажите Вы, нет не совсем все так просто.
Двигатель переменного тока.
Подключаются и работают от переменного тока (AC). Разделяются на синхронные и асинхронные двигатели. Но сразу же возникает путаница, а вот двигатель компьютерного вентилятора к каким относится? Мы об этом поговорим ниже.
Двигатель постоянного тока
Вы скажите да тут все просто, подключаем двигатель к постоянному току (DC) и значит он постоянного тока, так то так, но не совсем и даже не из за примера выше с вентилятором компьютера. Какой двигатель применяется в известных нам сетевых дрелях, болгарках, перфораторах, шлиф машинах и так далее, в тех инструментах которые мы включаем в бытовую сеть "220 вольт"? Да там применяется двигатель постоянного тока! Как так, скажите Вы? Мы же втыкаем его в сеть переменного тока "220 вольт"? Все очень просто соединяем обмотки якоря и возбуждения последовательно или параллельно, чтобы полярность изменялась одинаково и на роторе и на статоре. Все представлено на схеме ниже.
Универсальные двигатели
Как видно из примера выше некоторые коллекторные двигатели переменного тока можно подключить и к постоянному току, но с более низким напряжением.
Классификация двигателей постоянного тока
В свою очередь двигатели постоянного тока так же разделяются п о способу формирования магнитного поля на роторе:
- коллекторные двигатели;
- бесколлекторные (вентильные двигатели)
Но(! опять путаница) щёточно - коллекторный узел может применятся не только в двигателях постоянного тока, а как мы увидим ниже и в двигателях переменного тока.
Коллекторные двигатели
Применяется специальный щеточный коммутатор - коллектор.
Коллекторный узел от двигателя полотера.
На фото ниже видны щетка и коллектор двигателя шуруповёрта
Именно с помощью коллекторного узла формируется сначала ток на обмотках ротора, а затем и переменное магнитное поле которое взаимодействует с постоянным магнитным полем статора полученным с помощью постоянных или переменных магнитов. Так чаще всего, но может быть все наоборот, ротор будет постоянным магнитом, а на обмотках статора будет формироваться переменное магнитное поле. Именно такие двигатели используют в болгарках, дрелях и большинстве шуруповёртах (не всех). Такие же двигатели только постоянного тока используются в агрегатах машин, например стеклоподъёмники и дворники. По вариантам подключение обмоток они так же разделяются, но дальше мы уже не будем рассматривать и залезать в дебри.
Бесколлекторные (вентильные двигатели)
Все то же самое, что выше, но щёточно-коллекторного узла нет, он заменён электроникой, Отсюда и слово вентильный - управляемый силовыми ключами (вентилями). Так как отказались от коллектора то ротор конструктивно сделали без обмоточным, вместо этого используют постоянные магниты что конечно увеличивает цену. Кроме того для коммутации нужно знать положении ротора (хотя не всегда), для этого применяют разные датчики (их много разных) поэтому большинство двигателей применяется в электронной промышленности, а бесколлекторные двигатели иногда называют шаговыми хотя это не одно и то же. Шаговый двигатель не является отдельным классом двигателя. Конструктивно он представляет из себя бесколлекторный двигатель который способен поворачиваться на определённый угол и работать с определённой скоростью это достигается тем что конструктивно в бесколлекторных двигателях уже есть вся электроника как силовая так и контролирующая для поворота вала на определенный угол.
Классификация двигателей переменного тока
Двигатели переменного тока по принципу работы делятся:
- синхронные двигатели - ротор вращается со скоростью вращения магнитного поля в статоре.
- асинхронные двигатели - магнитное поле вращается быстрее ротора. Частота вращения ротора отстает от частоты статора на величину скольжения, которая составляет 0,012-0,06 (при стандартом частоте в 50 Гц)
Чаще, особенно в быту встречаются асинхронные двигатели, но в последнее время все больше и больше развития получают синхронные двигатели в связи с развитием микропроцессорной техники и электромобилей.
Конструкция
Мы разберем конструктивные различия классических представителей этих двух классов, но тут могут быть нюансы (я же говорил, что классификация путанная) и о них ниже.
Конструкция и сравнение синхронных и асинхронных двигателей.
Статоры идентичны конструктивно и функционально (несут одну функцию — создание магнитного поля)
Принцип работы электродвигателей
Принцип работы электродвигателей. Основные понятия.
Магнетизм
Наиболее характерное магнитное явление - притяжение магнитом кусков железа - известно со времен глубокой древности. Ещё одной очень важной особенностью магнитов является наличие у них полюсов: северного (отрицательного) и южного (положительного). Противоположные полюса притягиваются, а одинаковые - отталкиваются друг от друга.
Магнитное поле
Магнитное поле можно условно изобразить линиями в виде магнитного потока, движущегося от северного полюса к южному. В некоторых случаях определить, где северный, а где южный полюс, достаточно сложно.
Электромагнетизм
Вокруг проводника, при пропускании по нему электрического тока, создаётся магнитное поле. Это явление называется электромагнетизмом. Физические законы одинаковы для магнетизма и электромагнетизма.
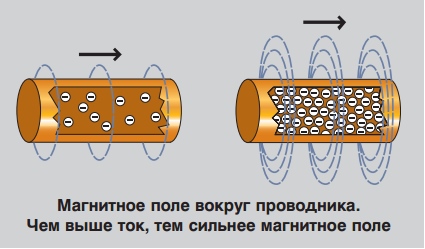
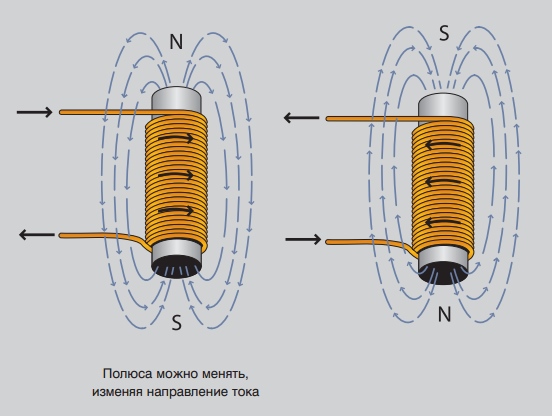
Магнитное поле вокруг проводников можно усилить, если намотать их на катушку со стальным сердечником. Когда проводник намотан на катушку, все линии магнитного потока, образуемого каждым витком, сливаются и создают единое магнитное поле вокруг катушки.
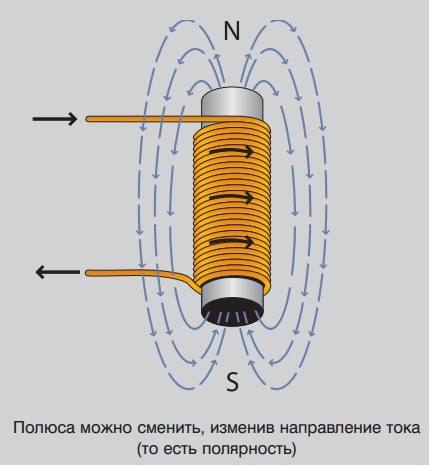
Чем больше витков на катушке, тем сильнее магнитное поле. Это поле имеет такие же характеристики, что и естественное магнитное поле, а, следовательно, у него тоже есть северный и южный полюса.
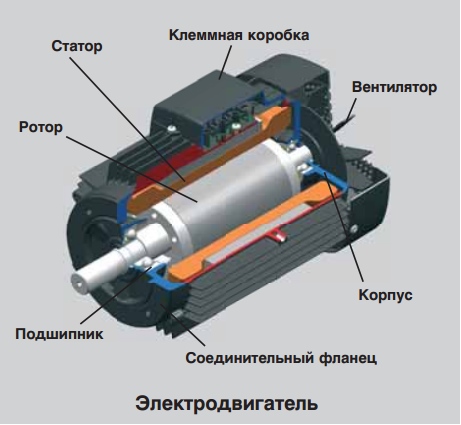
Вращение вала электродвигателя обусловлено действием магнитного поля. Основные части электродвигателя: статор и ротор.
Ротор:
Подвижная часть электродвигателя, которая вращается с валом электродвигателя, двигаясь вместе с магнитным полем статора.
Статор:
Неподвижный компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
Вращение под действием магнитного поля
Преимуществом магнитных полей, которые создаются токопроводящими катушками, является возможность менять местами полюса магнита посредством изменения направления тока. Именно эта возможность смены полюсов и используется для преобразования электрической энергии в механическую.
Одинаковые полюса магнитов отталкиваются друг от друга, противоположные полюса - притягиваются. Можно сказать, что это свойство используется для создания непрерывного движения ротора с помощью постоянной смены полярности статора. Ротором здесь, является магнит, который может вращаться.
Чередование полюсов с помощью переменного тока
Чередование полюсов с помощью переменного тока
Полярность постоянно меняется с помощью переменного тока (AC). Далее мы увидим, как ротор заменяется магнитом, который вращается под действием индукции. Здесь важную роль играет переменный ток, поэтому будет полезно привести здесь краткую информацию о нём:
Переменный ток - AC
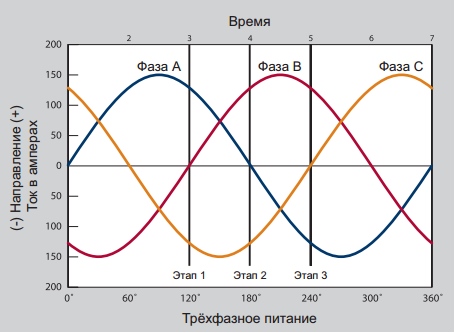
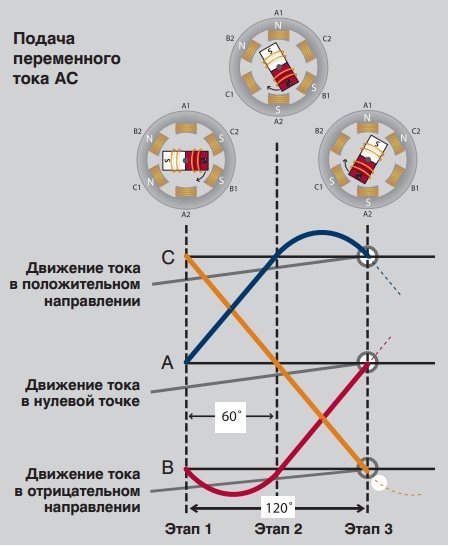
Под переменным током понимается электрический ток, периодически изменяющий свое направление в цепи так, что среднее значение силы тока за период равно нулю. Вращающееся магнитное поле можно создать с помощью трёхфазного питания. Это означает, что статор подсоединяется к источнику переменного тока с тремя фазами. Полный цикл определяется как цикл в 360 градусов. Это значит, что каждая фаза расположена по отношению к другой под углом в 120 градусов. Фазы изображаются в виде синусоидальных кривых, как представлено на рисунке.
Трёхфазный переменный ток
Трёхфазное питание - это непрерывный ряд перекрывающихся напряжений переменного тока (AC).
Смена полюсов
На следующих страницах объясняется, как взаимодействуют ротор и статор, заставляя электродвигатель вращаться.

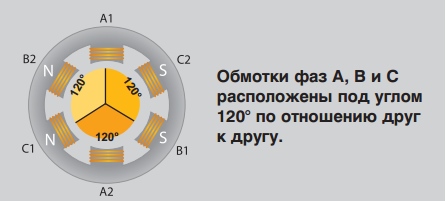
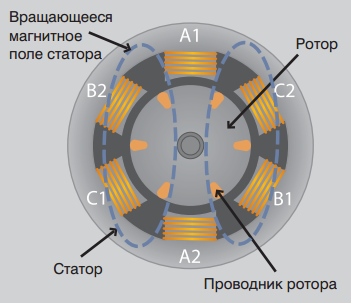
Для наглядности мы заменили ротор вращающимся магнитом, а статор - катушками. В правой части страницы приведено изображение двухполюсного трёхфазного электродвигателя. Фазы соединены парами: 1-й фазе соответствуют катушки A1 и A2, 2-й фазе - B1 и B2 , а 3-й соответствуют C1 и C2. При подаче тока на катушки статора одна из них становится северным полюсом, другая - южным. Таким образом, если A1 - северный полюс, то A2 - южный.
Питание в сети переменного тока
Обмотки фаз A, B и C расположены по отношению друг к другу под углом в 120 градусов.
Количество полюсов электродвигателя определяется количеством пересечений поля обмотки полем ротора. В данном случае каждая обмотка пересекается дважды, что означает, что перед нами двухполюсный статор. Таким образом, если бы каждая обмотка появлялась четыре раза, это был бы четырехполюсный статор и т.д.
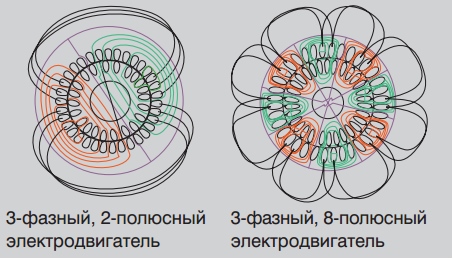
Когда на обмотки фаз подаётся электрический ток, вал электродвигателя начинает вращаться со скоростью, обусловленной числом полюсов (чем меньше полюсов, тем ниже скорость)
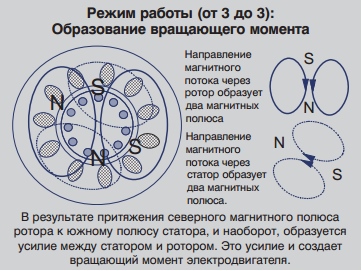
Вращение ротора
Ниже рассказывается о физическом принципе работы электродвигателя (как ротор вращается внутри статора). Для наглядности, заменим ротор магнитом. Все изменения в магнитном поле происходят очень быстро, поэтому нам необходимо разбить весь процесс на этапы. При прохождении трёхфазного переменного тока по обмоткам статора в нем создается магнитное поле, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля.
Начав вращение, магнит будет следовать за меняющимся магнитным полем статора. Поле статора меняется таким образом, чтобы поддерживалось вращение в одном направлении.
Индукция
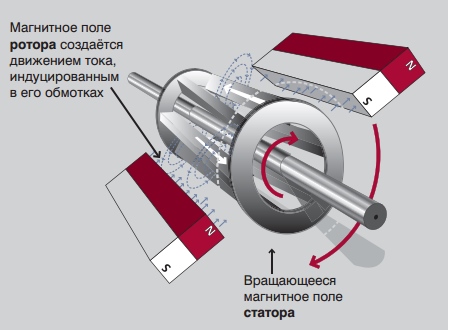
Ранее мы установили, как обыкновенный магнит вращается в статоре. В электродвигателях переменного тока AC установлены роторы, а не магниты. Наша модель очень схожа с настоящим ротором, за исключением того, что под действием магнитного поля ротор поляризуется. Это вызвано магнитной индукцией, благодаря которой в проводниках ротора наводится электрический ток.
Индукция
В основном ротор работает так же, как магнит. Когда электродвигатель включен, ток проходит по обмотке статора и создаёт электромагнитное поле, которое вращается в направлении, перпендикулярном обмоткам ротора. Таким образом, в обмотках ротора индуцируется ток, который затем создаёт вокруг ротора электромагнитное поле и поляризацию ротора.
В предыдущем разделе, чтобы было проще объяснить принцип действия ротора, заменив его для наглядности магнитом. Теперь заменим магнитом статор. Индукция - это явление, которое наблюдается при перемещении проводника в магнитном поле. Относительное движение проводника в магнитном поле приводит к появлению в проводнике так называемого индуцированного электрического тока. Этот индуцированный ток создаёт магнитное поле вокруг каждой обмотки проводника ротора. Так как трёхфазное AC питание заставляет магнитное поле статора вращаться, индуцированное магнитное поле ротора будет следовать за этим вращением. Таким образом вал электродвигателя будет вращаться. Электродвигатели переменного тока часто называют индукционными электродвигателями переменного тока, или ИЭ (индукционными электродвигателями).
Принцип действия электродвигателей
Индукционные электродвигатели состоят из ротора и статора.
Токи в обмотках статора создаются фазовым напряжением, которое приводит в движение индукционный электродвигатель. Эти токи создают вращающееся магнитное поле, которое также называется полем статора. Вращающееся магнитное поле статора определяется токами в обмотках и количеством фазных обмоток.
Вращающееся магнитное поле формирует магнитный поток. Вращающееся магнитное поле пропорционально электрическому напряжению, а магнитный поток пропорционален электрическому току.
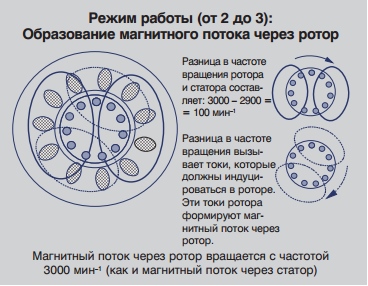
Вращающееся магнитное поле статора движется быстрее ротора, что способствует индукции токов в обмотках проводников роторов, в результате чего образуется магнитное поле ротора. Магнитные поля статора и ротора формируют свои потоки, эти потоки будут притягиваться друг к другу и создавать вращающий момент, который заставляет ротор вращаться. Принципы действия индукционного электродвигателя представлены на иллюстрациях справа.
Таким образом, ротор и статор являются наиболее важными составляющими индукционного электродвигателя переменного тока. Они проектируются с помощью САПР (системы автоматизированного проектирования). Далее мы подробнее поговорим о конструкции ротора и статора.

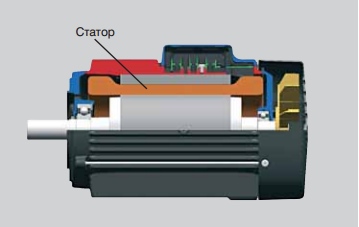
Статор элетродвигателя
Статор - это неподвижный электрический компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых всё время меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
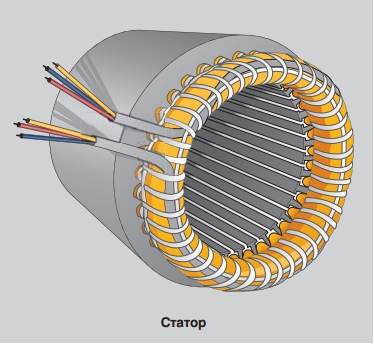
Все статоры устанавливаются в раму или корпус. Корпус статора электродвигателей Grundfos для электродвигателей мощностью до 22 кВт чаще всего изготавливается из алюминия, а для электродвигателей с большей мощностью - из чугуна. Сам статор устанавливается в кожухе статора. Он состоит из тонких пластин электротехнической стали, обмотанных изолированным проводом. Сердечник состоит из сотен таких пластин. При подаче питания переменный ток проходит по обмоткам, создавая электромагнитное поле, перпендикулярное проводникам ротора. Переменный ток (AC) вызывает вращение магнитного поля.
Изоляция статора должна соответствовать требованиям IEC 62114, где приведены различные классы защиты (по уровням температуры) и изменения температуры (AT). Электродвигатели Grundfos имеют класс защиты F, а при увеличении температуры - класс B. Grundfos производит 2-полюсные электродвигатели мощностью до 11 кВт и 4-полюсные электродвигатели мощностью до 5,5 кВт. Более мощные электродвигатели Grundfos закупает у других компаний, уровень качества продукции которых соответствует принятым в Grundfos стандартам. Для насосов, в основном, используются статоры с двумя, четырьмя и шестью полюсами, так как частота вращения вала электродвигателя определяет давление и расход насоса. Можно изготовить статор для работы с различными напряжениями, частотами и мощностями на выходе, а также для переменного количества полюсов.
Ротор элетродвигателя
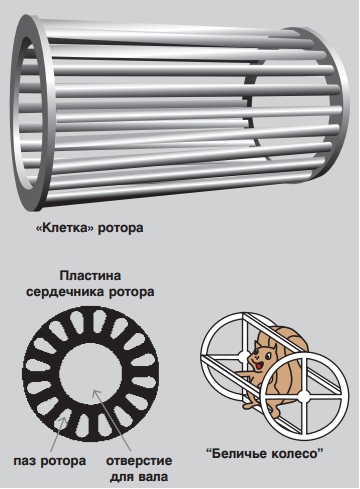
При вращении статора магнитное поле движется перпендикулярно обмоткам проводников ротора; появляется ток. Этот ток циркулирует по обмоткам проводников и создаёт магнитные поля вокруг каждого проводника ротора. Так как магнитное поле в статоре постоянно меняется, меняется и поле в роторе. Это взаимодействие и вызывает движение ротора. Как и статор, ротор изготовлен из пластин электротехнической стали. Но, в отличие от статора, с обмотками из медной проволоки, обмотки ротора выполнены из литого алюминия или силумина, которые выполняют роль проводников.
Асинхронные электродвигатели
Частоту вращения магнитного поля принято считать синхронной частотой вращения (Ns). Синхронную частоту вращения можно рассчитать следующим образом: частота сети (F), умноженная на 120 и разделенная на число полюсов (P).
Если, например, частота сети 50 Гц, то синхронная частота вращения для 2-полюсного электродвигателя равна 3000 мин-1.
Синхронная частота вращения уменьшается с увеличением числа полюсов. В таблице, приведенной ниже, показана синхронная частота вращения для различного количества полюсов.
Читайте также: