
Разработка схемы управления приставки за рулем
Три наиболее популярные схемы управления асинхронным двигателем
Все электрические принципиальные схемы станков, установок и машин содержат определенный набор типовых блоков и узлов, которые комбинируются между собой определенным образом. В релейно-контакторных схемах главными элементами управления двигателями являются электромагнитные пускатели и реле.
Наиболее часто в качестве привода в станках и установках применяются трехфазные асинхронные двигатели с короткозамкнутым ротором. Эти двигатели просты в устройстве, обслуживании и ремонте. Они удовлетворяют большинству требований к электроприводу станков. Главными недостатками асинхронных двигателей с короткозамкнутым ротором являются большие пусковые токи (в 5-7 раз больше номинального) и невозможность простыми методами плавно изменять скорость вращения двигателей.
С появлением и активным внедрением в схемы электроустановок преобразователей частоты такие двигатели начали активно вытеснять другие типы двигателей (асинхронные с фазным ротором и двигатели постоянного тока) из электроприводов, где требовалось ограничивать пусковые токи и плавно регулировать скорость вращения в процессе работы.
Одной из преимуществ использования асинхронных двигателей с короткозамкнутым ротором является простота их включения в сеть. Достаточно подать на статор двигателя трехфазное напряжение и двигатель сразу запускается. В самом простом варианте для включения можно использовать трехфазный рубильник или пакетный выключатель. Но эти аппараты при своей простоте и надежности являются аппаратами ручного управления.
В схемах же станков и установок часто должна быть предусмотрена работа того или иного двигателя в автоматическом цикле, обеспечиваться очередность включения нескольких двигателей, автоматическое изменение направления вращения ротора двигателя (реверс) и т.д.
Обеспечить все эти функции с аппаратами ручного управления невозможно, хотя в ряде старых металлорежущих станков тот же реверс и переключение числа пар полюсов для изменения скорости вращения ротора двигателя очень часто выполняется с помощью пакетных переключателей. Рубильники и пакетные выключатели в схемах часто используются как вводные устройства, подающие напряжение на схему станка. Все же операции управления двигателями выполняются электромагнитными пускателями.

Включение двигателя через электромагнитный пускатель обеспечивает кроме всех удобств при управлении еще и нулевую защиту. Что это такое будет рассказано ниже.
Наиболее часто в станках, установках и машинах применяются три электрические схемы:
схема управления нереверсивным двигателем с использованием одного электромагнитного пускателя и двух кнопок "пуск" и "стоп",
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок.
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок, в двух из которых используются спаренные контакты.
Разберем принцип работы всех этих схем.
1. Схема управления двигателем с помощью магнитного пускателя
Схема показана на рисунке.

При нажатии на кнопку SB2 "Пуск" на катушка пускателя попадает под напряжение 220 В, т.к. она оказывается включенной между фазой С и нулем ( N) . Подвижная часть пускателя притягивается к неподвижной, замыкая при этом свои контакты. Силовые контакты пускателя подают напряжение на двигатель, а блокировочный замыкается параллельно кнопке "Пуск". Благодаря этому при отпускании кнопки катушка пускателя не теряет питание, т.к. ток в этом случае идет через блокировочный контакт.
Если бы блокировочный контакт не был бы подключен параллельно кнопки (по какой-либо причине отсутствовал), то при отпускании кнопки "Пуск" катушка теряет питание и силовые контакты пускателя размыкаются в цепи двигателя, после чего он отключается. Такой режим работы называют "толчковым". Применяется он в некоторых установках, например в схемах кран-балок.
Остановка работающего двигателя после запуска в схеме с блокировочным контактом выполняется с помощью кнопки SB1 "Стоп". При этом, кнопка создает разрыв в цепи, магнитный пускатель теряет питание и своими силовыми контактами отключает двигатель от питающей сети.
В случае исчезновения напряжения по какой-либо причине магнитный пускатель также отключается, т.к. это равносильно нажатию на кнопку "Стоп" и созданию разрыва цепи. Двигатель останавливается и повторный запуск его при наличии напряжения возможен только при нажатии на кнопку SB2 "Пуск". Таким образом, магнитный пускатель обеспечивает т.н. "нулевую защиту". Если бы он в цепи отсутствовал и двигатель управлялся рубильником или пакетным выключателем, то при возврате напряжения двигатель запускался бы автоматически, что несет серьезную опасность для обслуживающего персонала. Подробнее смотрите здесь - защита минимального напряжения.
Анимация процессов, протекающих в схеме показана ниже.
2. Схема управления реверсивным двигателем с помощью двух магнитных пускателей
Схема работает аналогично предыдущей. Изменение направления вращения (реверс) ротор двигателя меняет при изменении порядка чередования фаз на его статоре. При включении пускателя КМ1 на двигатель приходят фазы - A , B , С, а при включении пускателя KM2 - порядок фаз меняется на С, B , A.
Схема показана на рис. 2.

Включение двигателя на вращение в одну сторону осуществляется кнопкой SB2 и электромагнитным пускателем KM1 . При необходимости смены направления вращения необходимо нажать на кнопку SB1 "Стоп", двигатель остановится и после этого при нажатии на кнопку SB 3 двигатель начинает вращаться в другую сторону. В этой схеме для смены направления вращения ротора необходимо промежуточное нажатие на кнопку "Стоп".
Кроме этого, в схеме обязательно использование в цепях каждого из пускателей нормально-закрытых (размыкающих) контактов для обеспечения защиты от одновременного нажатия двух кнопок "Пуск" SB2 - SB 3, что приведет к короткому замыканию в цепях питания двигателя. Дополнительные контакты в цепях пускателей не дают пускателям включится одновременно, т.к. какой-либо из пускателей при нажатии на обе кнопки "Пуск" включиться на секунду раньше и разомкнет свой контакт в цепи другого пускателя.
Необходимость в создании такой блокировки требует использования пускателей с большим количеством контактов или пускателей с контактными приставками, что удорожает и усложняет электрическую схему.
Анимация процессов, протекающих в схеме с двумя пускателями показана ниже.
3. Схема управления реверсивным двигателем с помощью двух магнитных пускателей и трех кнопок (две из которых имеют контакты с механической связью)
Схема показана на рисунке.

Отличие этой схемы от предыдущей в том, что в цепи каждого пускателя кроме общей кнопки SB1 "Стоп"включены по 2 контакта кнопок SB2 и SB 3, причем в цепи КМ1 кнопка SB2 имеет нормально-открытый контакт (замыкающий), а SB 3 - нормально-закрытый (размыкающий) контакт, в цепи КМ3 - кнопка SB2 имеет нормально-закрытый контакт (размыкающий), а SB 3 - нормально-открытый. При нажатии каждой из кнопок цепь одного из пускателей замыкается, а цепь другого одновременно при этом размыкается.
Такое использование кнопок позволяет отказаться от использования дополнительных контактов для защиты от одновременного включения двух пускателей (такой режим при этой схеме невозможен) и дает возможность выполнять реверс без промежуточного нажатия на кнопку "Стоп", что очень удобно. Кнопка "Стоп" нужна для окончательной остановки двигателя.
Приведенные в статье схемы являются упрощенными. В них отсутствуют аппараты защиты (автоматические выключатели, тепловые реле), элементы сигнализации. Такие схемы также часто дополняются различными контактами реле, выключателей, переключателей и датчиков. Также возможно питание катушки электромагнитного пускателя напряжение 380 В. В этом случае он подключается от двух любых фаз, например, от А и B . Возможно использование понижающего трансформатора для понижения напряжения в схеме управления. В этом случае используются электромагнитные пускатели с катушками на напряжение 110, 48, 36 или 24 В.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
В приводах с секторными механизмами задание перекладки, изменения скорости и направления движения руля производится непосредственно исполнительным двигателем.
Контакторная схема управления электроприводом (рис. 1). Компаундный электродвигатель М установлен в румпельном отделении и управляется с поста управления ПУ командоконтроллерного типа. В комплект электрооборудования схемы входит также релейно-контакторная станция, состоящая из контакторов П, Л, КЛ, У и реле РУ, РГ.
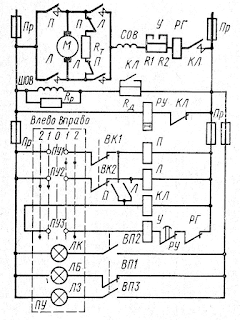
Ток якоря электродвигателя ограничен включением в его цепь резистора R1—R2, поэтому частота вращения на первой скорости небольшая. При включении контактор КЛ размыкает свой контакт в цепи катушки реле ускорения РУ, лишая ее питания. Но якорь этого реле отпускается не сразу, а с некоторой выдержкой времени. Только по истечении какого-то времени замкнется контакт РУ в цепи контактора ускорения У. Если теперь рукоятку ПУ перевести во второе положение, то через замкнувшийся контакт ПУЗ получит питание контактор У. Его контакт зашунтирует резистор R1—R2, и электродвигатель переходит на вторую скорость.
Если с первого положения во второе рукоятка ПУ переведена слишком быстро, то несмотря на замкнутый контакт ПУЗ, контактор У не сработает до тех пор, пока не окончится выдержка времени у реле РУ и не замкнется его контакт.
Перекладка руля на левый борт происходит так же, но при переводе рукоятки ПУ влево вместо контактора П срабатывает контактор Л, полярность подведенного напряжения к якорю электродвигателя изменяется на противоположную и он реверсирует.
При работе на второй скорости вправо или влево, в случае возникновения механических перегрузок (например, заклинивание руля в обломках льда), электродвигатель перегружается большим током. Этот опасный повышенный ток якоря проходит также по катушке грузового реле РГ, которое в этой опасной ситуации срабатывает, размыкая свой контакт РГ в цепи катушки контактора ускорения У.
Контактор У, потеряв питание, отпускает свой якорь, размыкается контакт У, и в цепь якоря вводится резистор R1—R2. Ток якоря уменьшается по двум причинам: во-первых, введен резистор R1—R2, электродвигатель переходит на частоту вращения первой скорости; во-вторых, уменьшается механическая нагрузка. Такая защита, выполненная с помощью реле РГ, когда электродвигатель при перегрузках не отключается совсем, а автоматически переводится на более низкую частоту вращения, называется грузовой.
Если перо руля переложено в одну из сторон на максимальный угол, то срабатывает конечный выключатель ВК1 или ВК2 и рулевая машина останавливается. Это не лишает возможность начать перекладку руля к диаметральной плоскости в другую сторону.
На пульте управления ПУ смонтированы сигнальные лампы ЛБ, ЛК, ЛЗ, управляемые путевыми выключателями ВП1, ВП2, ВПЗ. Белая лампа ЛБ горит, когда руль в диаметрали, красная ЛК — при нахождении руля слева от диаметрали, зеленая ЛЗ — когда руль переложен вправо.
Тяжелый режим работы рулевого электропривода, частые пуски и реверсы в сочетании с требованиями высокой надежности обусловили ограниченное применение подобных контакторных (или релейно-контакторных) схем. Их применяют при небольшой мощности рулевого электропривода (4—15 кВт).
Схема управления электроприводом по системе генератор-двигатель
- исполнительный двигатель постоянного тока М2;
- трехмашинный преобразовательный агрегат, состоящий из приводного асинхронного двигателя Ml, генератора Г и возбудителя В; , защиты и сигнализации.
На одном валу с приводным двигателем Ml вращаются с номинальной скоростью генератор Г и возбудитель В. Возбудитель выполнен с самовозбуждением (обмотка возбуждения возбудителя ОВВ), и на его якоре возникает номинальное напряжение. От якоря возбудителя получает питание обмотка возбуждения ОВМ2 исполнительного двигателя М2, связанного с пером руля через секторную передачу. Наличие магнитного потока в исполнительном электродвигателе еще не обеспечивает его вращения, он остается неподвижным, так как генератор Г еще не подает питание на его якорь (генератор не возбужден, его обмотка возбуждения ОВГ разомкнута).
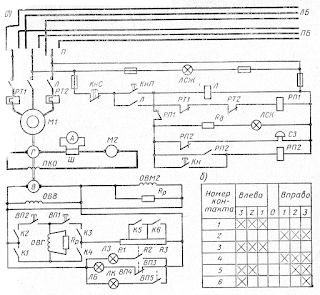
Теперь через контакты К1, К3 и резисторы R1—R2—R3 от якоря возбудителя протекает ток через обмотку возбуждения ОВГ генератора. Генератор возбуждается, на его якоре появляется э. д. с., которая подводится к якорю М2; начинается перекладка руля на первой скорости.
Для увеличения скорости перекладки руля рукоятку переводят во второе и, наконец, в третье положение. При этом замыкаются контакты К5, К6, они шунтируют резисторы R1—R2, R2—R3, ток через обмотку ОВГ увеличивается. Увеличению тока соответствует рост э. д. с. генератора и, следовательно, рост напряжения, подводимого от генератора Г к двигателю М2, частота вращения последнего увеличивается. Регулирование осуществляется способом изменения подводимого напряжения к якорю электродвигателя.
При остановке двигателя М2 рукоятку контроллера переводят в нулевое положение, размыкается цепь обмотки ОВГ, генератор теряет возбуждение, его э. д. с. близка к нулю, исполнительный двигатель останавливается.
В момент размыкания обмотки ОВГ на ней индуктируется э. д. с. самоиндукции, которая быстро уменьшается, создавая ток через разрядный резистор Rp. Э. д. с. самоиндукции на концах обмотки ОВГ при отсутствии разрядного резистора Rр может создать опасный потенциал, который, существуя некоторое время пробьет изоляцию обмотки. Благодаря резистору Rp исключается длительное наличие опасного потенциала на обмотке ОВГ, он расходуется на создание тока в контуре ОВГ — Rp.
При работе схемы вправо вместо контактов К1, К3 замыкаются контакты К2, К4. Это изменяет направление тока по обмотке ОВГ, изменяется на противоположную полярность генератора и полярность напряжения, подведенного к двигателю М2, — он реверсирует.
Следовательно, реверс исполнительного двигателя осуществляется изменением полярности напряжения, подведенного к его якорю.
Система генератор — двигатель обеспечивает надежную автоматическую разгрузку генератора и двигателя в моменты заклинивания руля. Это достигается с помощью противокомпаундной обмотки ПКО. Она лежит на тех же полюсах генератора, на которых расположена его основная обмотка ОВГ. Обмотка ПКО является последовательной, через нее проходит ток якоря генератора и исполнительного двигателя, но ее магнитный поток действует встречно потоку обмотки ОВГ.
В нормальных условиях действие потока обмотки ПКО не влияет на работу схемы, потому что она имеет небольшое число витков. При перегрузках возникает большой ток через якоря генератора Г и двигателя М2. Этот ток, проходя по обмотке ПКО, резко увеличивает ее магнитный поток, а так как этот поток направлен встречно потоку обмотки ОВГ, то суммарный поток генератора уменьшается, его э. д. с. снижается, к электродвигателю подводится пониженное напряжение, уменьшаются его частота вращения и ток. Так достигается автоматическая разгрузка.
Согласно Правилам Регистра, схема не имеет отключающей защиты при перегрузках, но имеет сигнализацию. При запуске приводного двигателя Ml вместе с линейным контактором Л получает питание реле перегрузки РП1, его размыкающий контакт размыкается и сигнальная красная лампа ЛСК и сигнальный звонок СЗ обесточиваются. При перегрузке двигателя М2 и генератора Г перегружается также двигатель Ml, в его цепи возникает большой ток, срабатывает одно из тепловых реле РТ1 или РТ2, своими контактами разрывая цепь питания реле РП1. Контакт этого реле замыкается, загорается сигнальная лампа ЛСК, и звенит звонок СЗ.
Если аварийная ситуация будет замечена, то можно нажать на кнопку Кн: получит питание реле РП2, одним контактом оно зашунтирует кнопку Кн, а другим снимет питание со звонка.
В крайних положениях пера руля схема выключается конечным выключателем ВП1 или ВП2. О положении пера руля сигнализируют лампы ЛБ, ЛЗ, ЛК.
Величину главного тока контролируют по амперметру А, включенному на измерительный шунт Ш.
Несмотря на громоздкость данной схемы (применены четыре электромашины), система генератор — двигатель является наиболее приемлемой для электропривода руля. Это объясняется ее большой маневренностью и хорошей перегрузочной способностью за счет обмотки ПКО. На рис. 2, б приведена таблица замыканий контактов контроллера.
Бесконтактная схема следящего управления электроприводом
Бесконтактная схема следящего управления электроприводом (рис. 3). Здесь применена система генератор — двигатель, но, в отличие от предыдущей схемы, цепи управления выполнены по бесконтактному принципу. Это в значительной мере увеличивает надежность и долговечность электропривода в целом.
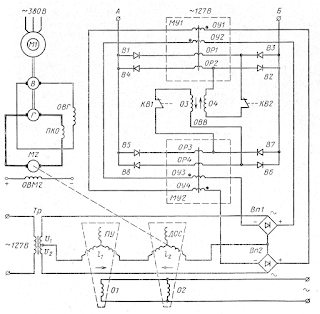
На одном валу с приводным двигателем Ml (его схема пуска и сигнализации не показана) вращаются с неизменной скоростью генератор Г и возбудитель В. Управление генератором осуществляется через возбудитель. Последний имеет две дифференциально включенные обмотки ОВВ, каждая из которых получает питание от своего магнитного усилителя МУ1 или МУ2. Усилитель МУ1 имеет две рабочие обмотки ОР1, ОР2 и две обмотки управления ОУ1, ОУ2. Аналогично устроен усилитель МУ2.
Первая и вторая обмотки ОВВ расположены на одних и тех же полюсах возбудителя В. Магнитные потоки, создаваемые обмотками ОВВ, направлены встречно, и если они равны, то суммарный поток возбудителя В равен нулю, поэтому он не возбужден, его э. д. с. равна нулю, через обмотку возбуждения генератора ОВГ ток не проходит. Следовательно, генератор тоже не возбужден, он не подает напряжение на исполнительный двигатель М2 — рулевая машина неподвижна.
Задающим элементом схемы является фазочувствительный выпрямитель, состоящий из трансформатора питания Тр, двух выпрямителей Вn1, Вn2 и двух сельсинов. Первый сельсин ПУ — пульт управления, связан механически с рукояткой управления, второй сельсин ДОС — датчик обратной связи, связан с исполнительным двигателем М2. Из трех обмоток ротора каждого сельсина используется по две обмотки, статорные обмотки О1, О2 питаются нерегулируемым переменным током.
Работа схемы управления рулем происходит следующим образом. В исходном состоянии (ПУ и ДОС — в нулевом положении) э. д. с., снимаемые с обмоток роторов, равны нулю (e1 = e2 = 0). В контурах фазочувствительного выпрямителя действуют только равные напряжения U1 = U2; через выпрямители Вn1 и Вn2 проходят одинаковые токи. От выпрямителя Вn1 питаются две последовательно включенные обмотки ОУ2 и ОУ3, принадлежащие разным магнитным усилителям (точками обозначены начала обмоток). От плюса выпрямителя Вn1 ток протекает по обмотке ОУ2 от конца к началу. Это говорит о том, что обмотка управления ОУ2 железо усилителя МУ1 размагничивает. По обмотке ОУ3 ток протекает от начала к концу, и, следовательно, поток этой обмотки железо усилителя МУ2 намагничивает. В то же время от выпрямителя Вn2 питаются обмотки ОУ1 (намагничивает железо усилителя МУ1) и ОУ4 (размагничивает железо усилителя МУ2).
В результате на каждый магнитный усилитель одна обмотка действует намагничивающе, другая — размагничивающе. Если учесть, что в исходном положении токи всех обмоток управления одинаковы, то можно сделать вывод: магнитные потоки обмоток ОУ1, ОУ2 и потоки обмоток ОУ3, ОУ4 взаимно компенсируются — магнитные усилители не управляются.
В этом исходном положении железо магнитных усилителей намагничено одинаково; от намагничивания их железа зависит индуктивное сопротивление рабочих обмоток ОР1, ОР2, ОР3, ОР4. Значит сопротивления всех рабочих обмоток одинаковы.
Последовательно с рабочими обмотками ОР1—ОР4 на стороне постоянного тока включены обмотки возбудителя ОВВ. По второй обмотке ОВВ ток протекает следующим образом. В первый полупериод, когда на выводе А плюс: вывод А—В1 — обмотка ОР1 — конечный выключатель КВ2 — обмотка О4 — вывод Б. Во второй полупериод, когда на выводе Б плюс: вывод Б—В3 — конечный выключатель КВ2 — обмотки О4—ОР2—В4 — вывод А.
Аналогично запитана обмотка О3 — через рабочие обмотки ОР3, ОР4 магнитного усилителя МУ2. Так как сопротивления всех обмоток ОР1—ОР4 равны, то и токи, проходящие по встречно-включенным обмоткам О3, О4, равны, потоки этих обмоток компенсируются, возбудитель и генератор не возбуждены, двигатель М2 и рулевая машина неподвижны.
Рассмотрим случай перекладки рукоятки ПУ вправо. Возникает э. д. с. е1 определенной фазы (ДОС пока неподвижен и е2 = 0). Допустим, что при повороте ПУ вправо фаза э. д. с. е1 совпала с фазой напряжения U1. К выпрямителю Вn1 подводится напряжение U1 + e1, а к выпрямителю Вn2 — напряжение U2—е1. По обмоткам ОУ2, ОУ3 пойдет ток больше, чем по обмоткам ОУ1, ОУ4.
Обмотка ОУ2 создает большее размагничивание железа магнитного усилителя МУ1, чем намагничивание, создаваемое обмоткой ОУ1; магнитный усилитель МУ1 размагничен, и сопротивление его обмоток ОР1, ОР2 повышается. Усилитель МУ2 намагничивается, так как ток обмотки ОУ3 больше, чем ток обмотки ОУ4, сопротивление обмоток ОР3, ОР4 уменьшается. Ток, проходящий через обмотки ОР1, ОР2 и О4, уменьшается, а проходящий через обмотки ОР3, ОР4 и О3 — увеличивается.
В возбудителе В появляется магнитный поток, создаваемый избыточным потоком обмотки О3. Возбудитель возбуждается с определенной полярностью и создает ток через обмотку ОВГ определенного направления. Возбуждается генератор Г, начинает работать двигатель М2, разворачивая руль. Одновременно разворачивается ротор датчика ДОС и возникает э. д. с. е2, по фазе встречная е1. В момент, когда е2 станет равной е1 и эти э. д. с. скомпенсируют друг друга, напряжения на выпрямителях снова станут равными, насыщения магнитных усилителей МУ1, МУ2 выравняются, токи через обмотки О3, О4 будут равными и машина остановится.
Это достигается при каком-то угле кладки ПУ вправо и таком же угле поворота ДОС. Следовательно, руль поворачивает на заданный угол и рулевой электропривод автоматически отключается. Так выполняется автоматическое слежение.
Для возврата руля в диаметральную плоскость пульт управления ПУ следует возвратить в исходное положение (e1 = 0). Теперь действует э.д.с. е2, по фазе совпадающая с U2.
Выпрямитель Вn2 получает напряжение U2 + e2, выпрямитель Вn1 — низкое напряжение U1 — е2. Теперь больше намагничивается усилитель МУ1, уменьшается сопротивление обмоток ОР1, ОР2, увеличивается ток обмотки О4. В возбудителе В действует магнитный поток противоположной полярности, возбудитель меняет свою полярность на противоположную, ток через обмотку ОВГ реверсирует, генератор изменяет полярность своей э. д. с. на противоположную, двигатель М2 вращается в другую сторону, возвращая руль к диаметрали.
Одновременно возвращается в исходное положение датчик ДОС, уменьшая е2 до нуля в момент, когда руль достигнет ДП, а ДОС — нулевого положения.
Работа схемы по перекладке руля на левый борт происходит аналогичным образом. Фаза э. д. с. е1 изменяется на 180° и теперь совпадает с фазой U2. Большим становится напряжение на выпрямителе Вn2, усилитель МУ1 насыщается, увеличивается ток обмотки О4, полярность возбудителя В и генератора Г соответствует кладке пера руля на левый борт.
При перегрузках возникает большой магнитный поток обмотки ПКО, уменьшающий действие потока обмотки ОВГ. Э. д. с. генератора, его ток и ток двигателя М2 уменьшаются. В крайних положениях пера руля машина выключается конечными выключателями КВ1, КВ2.
Рассмотренный принцип бесконтактного следящего управления является универсальным; его применяют также для управления электродвигателями гидравлических рулевых машин.
Схема следящего управления электроприводом с тиристорным преобразователем
Схема следящего управления электроприводом с тиристорным преобразователем (рис. 4). Цепь управления состоит из сельсина-датчика СД, управляемого с пульта управления ПУ, и сельсина-приемника СП, механически связанного с исполнительным двигателем М. СП через свою обмотку статора О2 электрически связан с блоком управления.
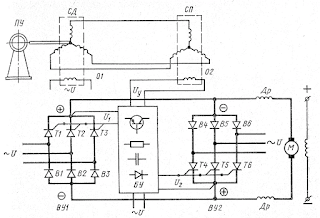
Силовая цепь состоит из двигателя М постоянного тока и двух управляемых выпрямителей ВУ1, ВУ2, каждый из которых собран на тиристорах и выпрямителях. Полярности выпрямителей ВУ1, ВУ2 включены на двигателе М встречно. В работе одновременно участвует только один из выпрямителей: ВУ1 обеспечивает вращение двигателя вправо, ВУ2 — влево.
Схема работает следующим образом. В исходном положении роторы сельсинов СД и СП в пространстве занимают одинаковое положение и, несмотря на то, что СД возбужден напряжением сети через обмотку О1, в обмотке О2 сельсина-приемника СП э. д. с. не индуктируется. Напряжение, подведенное к блоку управления, отсутствует (Uу = 0). Блок управления БУ сигнальные напряжения не выдает (U1 = 0; U2 = 0). Все тиристоры Т1—Т6 заперты, и несмотря на то, что к выпрямителям ВУ1, ВУ2 подведено трехфазное переменное напряжение ~ U, выпрямители его не выпрямляют и не пропускают на двигатель М.
При повороте пульта управления ПУ и сельсина СД вправо на обмотке О2 пока неподвижного сельсина-приемника СП возникает э. д. с. определенной фазы и к блоку управления БУ подводится напряжение Uy соответствующей фазы. Блок управления вырабатывает сигнальное напряжение U1 постоянного тока, которое открывает тиристоры Т1, Т2, Т3.
От выпрямителя ВУ1 начинает работать двигатель М. Происходит перекладка пера руля вправо; одновременно двигатель поворачивает ротор сельсина-приемника СП, что является причиной уменьшения э. д. с. на обмотке О2 и уменьшения напряжения управления Uy.
Тиристоры Tl, Т2, Т3 пропускают меньший ток — перекладка руля продолжается, но медленно. Наконец, когда команда пульта управления ПУ будет выполнена, сельсин СП занимает одинаковое положение с сельсином СД — э. д. с. на обмотке О2 исчезает, Uy=0, выпрямитель ВУ1 запирается.
Для перекладки руля влево двигатель М разворачивается в противоположную сторону, поэтому фаза э.д.с. обмотки О2 и фаза напряжения Uy изменяются на 180°. Теперь блок управления вырабатывает напряжение U2 и открывается выпрямитель ВУ2, обеспечивая вращение двигателя М в левую сторону.
Блок управления БУ собран на двух транзисторах. Дроссели Др служат для сглаживания пульсации выпрямленного напряжения от выпрямителей ВУ1 и ВУ2.
Схема является перспективной, так как она фактически построена на принципе системы генератор — двигатель. Здесь отсутствуют возбудитель и генератор, их роль выполняют более надежные управляемые выпрямители ВУ1, ВУ2 с блоком управления БУ.
На морских судах применяются два вида электроприводов рулей: электрический с механической передачей и электрогидравлический.
В электрическом приводе одной из частей механической передачи обычно служит зубчатый сектор, закрепляемый при помощи румпеля и буферных пружин на баллере руля. Червяк, скрепленный с валом электродвигателя муфтой, передает вращение вала зубчатому сектору при помощи колеса червячного зацепления.
Гидравлическая система электрогидравлического привода состоит из гидравлической машины, воздействующей плунжерами (поршнями) непосредственно на румпель руля и приводимой в движение насосом (или двумя насосами), который вращается электродвигателем. Различают электрогидравлические приводы с постоянным вращением приводного электродвигателя и с прерывистым вращением.
Для электрических рулевых приводов применяются системы управления: а) генератор — двигатель и б) контакторная.
Различают простую систему управления генератор — двигатель и систему управления следящего действия. При простой системе управления положение штурвала или рукоятки поста управления не определяет положения пера руля, поэтому обязательно приходится применять дополнительно указатели положения руля (аксиометры).
С применением системы управления следящего действия положение штурвала поста управления всегда определяет положение руля, т. е. по положению штурвала можно точно судить о положении руля.
Контакторная система управления рулевыми приводами дешевле, чем система генератор—двигатель, но менее надежна при многократных включениях и выключениях вследствие большого количества контактов в главной и вспомогательной цепях; она требует особенно тщательного ухода за реле и контакторами, частой регулировки и поддержания контактов всегда чистыми, без следов оплавления. Поэтому контакторная система применяется редко и для электроприводов малой мощности.
Управление рулевым электроприводом по системе генератор—двигатель
На рис. 1 изображена принципиальная схема управления рулевым электроприводом по системе генератор—двигатель. Пуск приводного электродвигателя преобразователя осуществляется пусковым реостатом РП. К зажимам якоря электродвигателя подключена сигнальная лампа JIC, находящаяся на главном распределительном щите; она показывает, что двигатель работает.
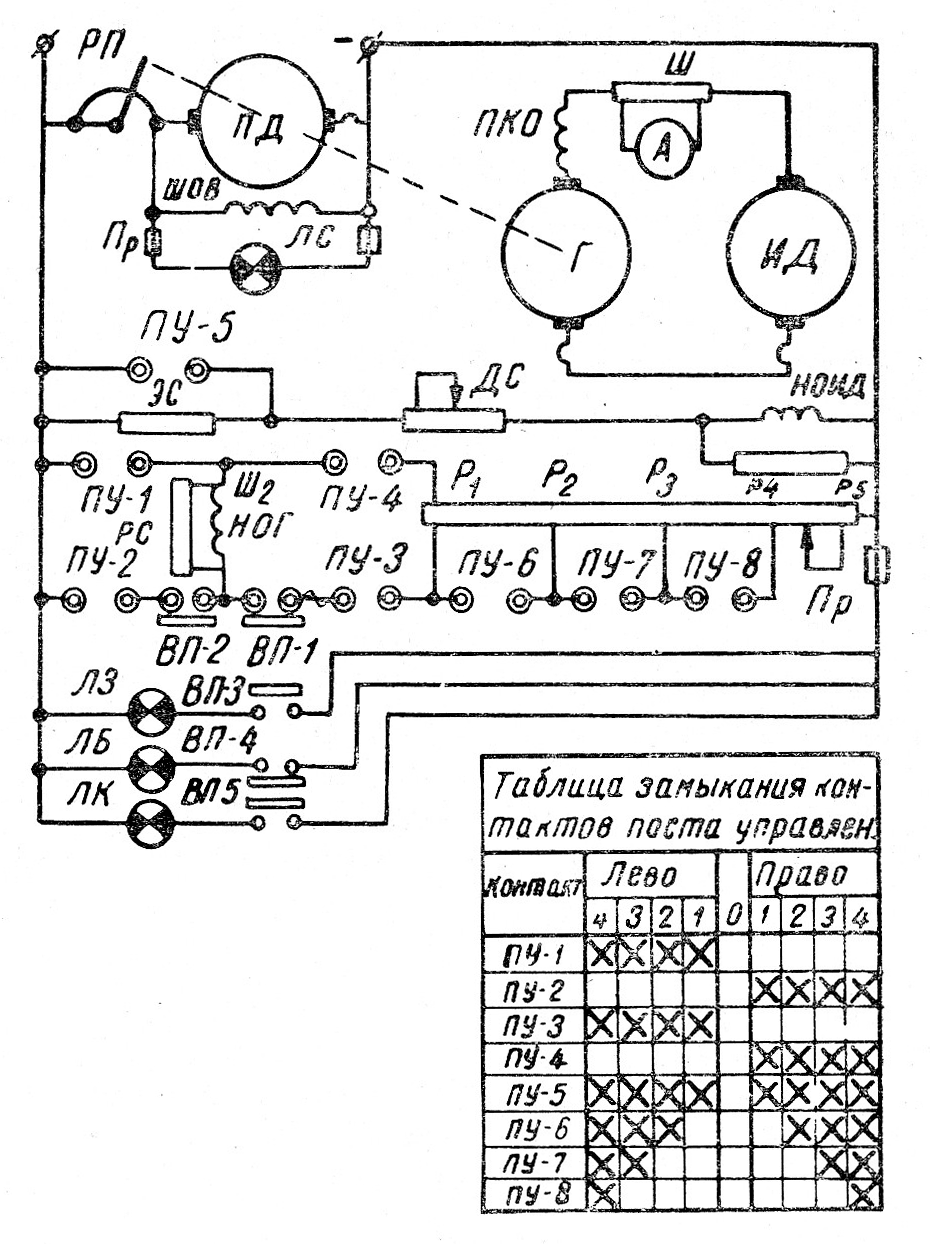
При подаче напряжения на схему управления обмотки возбуждения исполнительного электродвигателя НОИД получают питание через экономическое сопротивление ЭС, ограничивающее ток возбуждения при стоящем двигателе. Имеющееся в цепи возбуждения исполнительного электродвигателя добавочное сопротивление ДС служит для регулирования скорости вращения электродвигателя при первоначальной наладке схемы.
1) замыкаются контакты ПУ-5, шунтирующие экономическое сопротивление; исполнительный электродвигатель получает полное возбуждение; при дальнейшем передвижении рукоятки поста управления контакты ПУ-5 остаются замкнутыми и, следовательно, во время работы поток возбуждения исполнительного электродвигателя не изменяется;
2) замыкаются контакты ПУ-2 и ПУ-4, открывающие путь току в обмотку возбуждения генератора от клеммы Ш1 к клемме Ш2 через регулировочные сопротивления Р1 — Р5; генератор Г развивает минимальное напряжение, и исполнительный электродвигатель начинает вращаться с минимальной скоростью.
При последующих положениях рукоятки поста управления поочередно замыкаются контакты ПУ-6, ПУ-7 и ПУ-8. Генератор развивает полное напряжение, и исполнительный электродвигатель будет вращаться с номинальной скоростью до тех пор, пока перо руля не дойдет до крайнего положения на борту. Как только это случится, сработает путевой выключатель ВП-2, и цепь возбуждения генератора Г разомкнется. Исполнительный электродвигатель лишится питания, и так как его вращающийся по инерции якорь остается замкнутым на малое сопротивление якоря генератора, а возбуждение двигателя не отключено, то происходит энергичное динамическое торможение и исполнительный электродвигатель быстро останавливается.
Положение пера руля указывается сигнальными лампами: ЛЗ — при движении пера руля вправо от диаметральной плоскости; ЛК — при движении влево; ЛБ — когда оно находится в диаметральной плоскости. Лампы включаются контактами ВП-3 — ВП-5 путевого выключателя.
Защита исполнительного электродвигателя осуществляется противокомпаундной обмоткой генератора ПКО.
Рукоятка поста управления снабжена спиральной пружиной для возврата в нулевое положение. Это приспособление осуществляет нулевую защиту исполнительного электродвигателя, предохраняя его от запуска при полном напряжении генератора.
Кроме того, наличие пружины, автоматически возвращающей рукоятку в нулевое положение при достижении рулем нужного положения, облегчает труд рулевого, освобождая его от затраты физических усилий для возврата рукоятки, что при большом числе перекладок руля имеет существенное значение.
На судах с установками переменного тока преобразователь рулевого привода состоит из трех машин: приводного электродвигателя переменного тока, генератора постоянного тока и возбудителя, питающего обмотки возбуждения генератора, и исполнительного электродвигателя.
Системе генератор — двигатель следящего действия
Общее представление о рулевом электроприводе следящего действия дает принципиальная схема, представленная на рис. 2. Основными частями электропривода здесь, как и в рассмотренной выше простой схеме управления, являются генератор—двигатель, и рулевой двигатель. Но, кроме них, имеются (отсутствующие при простой системе) два связанных между собой аппарата: датчик и приемник, действием которых обеспечивается точное соответствие между положениями штурвала и руля.
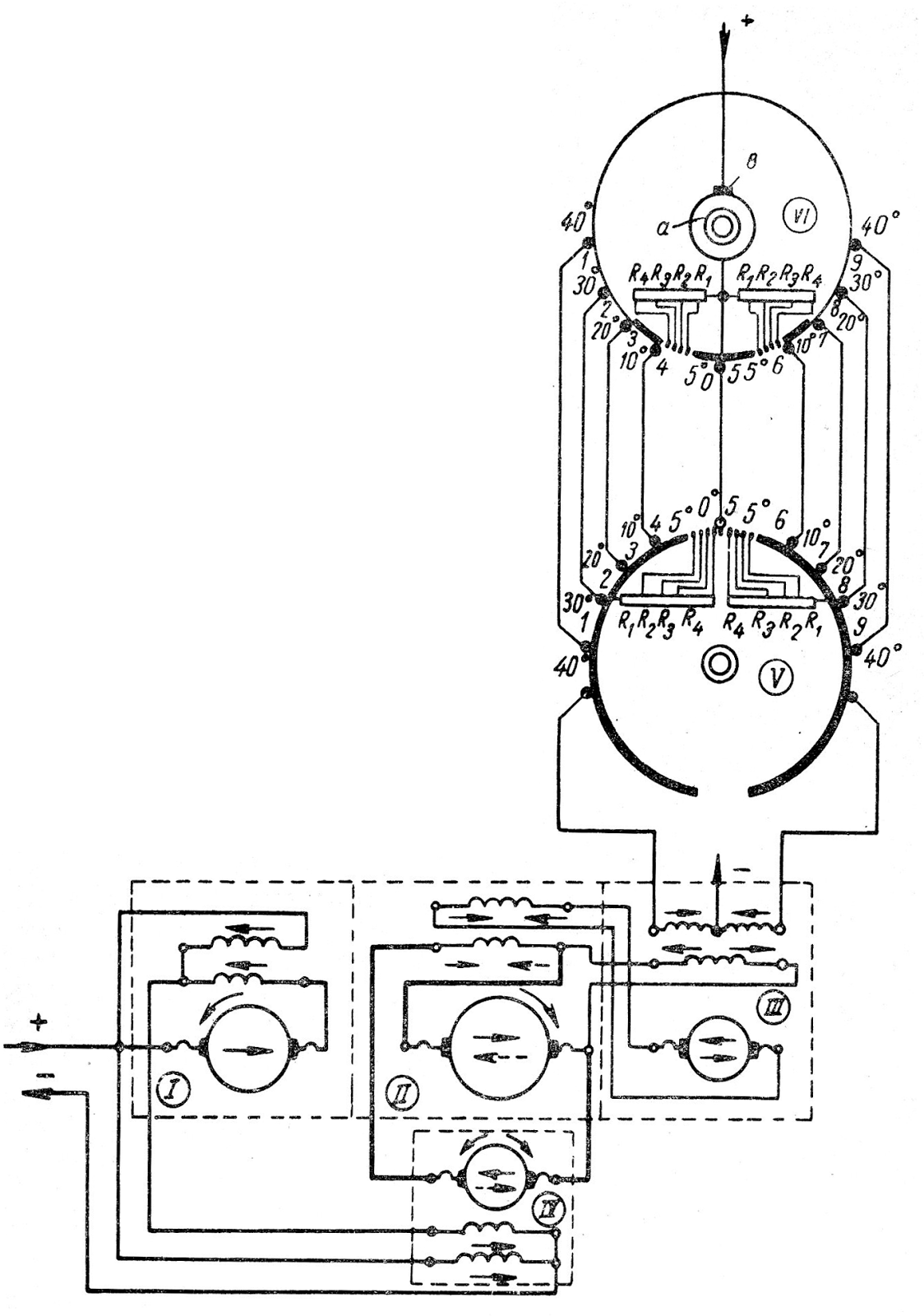
В системе генератор — двигатель следящего действия в отличие от простой системы управления генератор—двигатель состоит не из двух, а из трех машин: электродвигателя, генератора и сидящего на одном валу с ним специального возбудителя. Двигатель I смешанного возбуждения служит для привода генератора II, имеющего противокомпаундную обмотку, а также обмотку независимого возбуждения. Обмотка независимого возбуждения питается специальным возбудителем III, снабженным двумя обмотками: дифференциальной, состоящей из двух частей, и стабилизирующей, приключенной к зажимам генератора и служащей для ускорения приведения в равновесие магнитной системы возбудителя.
Рулевой двигатель IV в отличие от простой системы управления имеет, помимо независимого возбуждения, обмотку смешанного возбуждения, соединенную последовательно с цепью якоря приводного двигателя и служащую для смягчения толчков тока в питающей сети
Приемник V механически связан с рулем, а датчик VI — со штурвалом поста управления, причем между собой эти аппараты связаны электрически.
Дифференциальная обмотка возбудителя III состоит из двух ветвей с одинаковым количеством витков в каждой. Магнитные потоки, создаваемые этими ветвями, направлены навстречу друг другу. Если по обеим ветвям протекают токи одинаковой силы действия этих магнитных потоков взаимно уничтожаются. Напряжение на клеммах возбудителя при этом равно нулю, а потому нет напряжения и на зажимах генератора II. Если равенство (баланс) токов в ветвях дифференциальной обмотки будет нарушено, то под преобладающим действием ампер-витков одной ветви, по которой проходит большой ток, возбудитель разовьет электродвижущую силу определенной величины и определенного направления.
В случае преобладания тока в другой ветви направление электродвижущей силы возбудителя будет другим. В соответствии с этим будет меняться и полярность генератора II, а следовательно, и направление вращения рулевого двигателя.
Это нарушение равновесия (баланса) токов в ветвях дифференциальной обмотки возбудителя производит датчик VI, связанный механически со штурвалом поста управления.
Восстановление же нарушенного равновесия осуществляется приемником V, электрически связанным с датчиком и механически — с рулем.
Когда при нарушении равновесия токов датчиком рулевой двигатель приводится в движение и производит перекладку руля, приходит в действие механически связанный с рулем приемник V и, восстанавливая нарушенное равновесие, останавливает двигатель.
Датчик VI представляет собой вращающийся диск с размещенными на нем девятью контактами в виде сегментных пластин, изолированных друг от друга. Средний (длинный) контакт имеет протяженность в 10° по пять в каждую сторону, а короткие боковые — по 1°.
К диску прилегают девять неподвижных щеток (в форме роликов), расположенных через 10° друг от друга. Средняя контактная сегментная пластина прилегает к средней щетке 5.
Это (указанное на схеме) положение средней контактной пластины соответствует нулевому положению штурвала. Средняя пластина при помощи кольца (а) и скользящей щетки (в) соединена с положительным полюсом сети (+). С этим же полюсом сети соединены и остальные восемь контактов (по четыре контакта с каждой стороны средней контактной пластины), но не прямо, как средняя пластина, а через набор сопротивлений R1 - R4.
Неподвижные щетки датчика соединены девятижильным кабелем с девятью неподвижными щетками приемника V. Диск, связанный со штурвалом, можно вращать по часовой стрелке и против часовой стрелки.
Приемник V представляет собой диск, механически связанный с рулем. Этот диск имеет две большие боковые контактные сегментные пластины и в одном (верхнем) интервале между ними — девять малых контактов протяженностью по 1° каждый.
Средний контакт прилегает к средней неподвижной щетке, которая связана одной из жил кабеля со средней щеткой 5 датчика. Остальные контакты через набор таких же, как и у датчика, сопротивлений соединены с боковыми большими сегментными пластинами.
Положению руля в диаметральной плоскости судна соответст вует положение среднего контакта под средней щеткой (и нулевое положение штурвала).
Когда штурвал находится в нулевом положении, тока в цепи датчик — приемник нет. При повороте штурвала (следовательно, и диска датчика) в ту или другую сторону цепь замыкается, и ток через соответствующие контакты начинает поступать в одну (левую или правую) из боковых сегментных пластин приемника и далее в одну (левую или правую) из ветвей дифференциальной обмотки возбудителя III. На зажимах возбудителя возникает напряжение, генератор получает определенную полярность, рулевой двигатель производит перекладку руля. Руль будет переложен на угол, строго пропорциональный тому углу, на который был перемещен штурвал, связанный с диском датчика.
Одновременно с вращением руля вращается и связанный с ним диск приемника V. В результате вращения диска приемника ток поступит и во вторую (правую или левую) из боковых сегментных пластин приемника и дальше из нее во вторую (правую или левую) из ветвей дифференциальной обмотки возбудителя.
Сопротивления приемника равны сопротивлениям датчика и включены таким образом, что при перемещении диска приемника токи в обеих ветвях дифференциальной обмотки возбудителя уравниваются.
Как только равновесие токов, нарушенное вращением диска датчика, будет восстановлено вращением диска приемника, рулевой двигатель остановится.
Таким образом, при вращении диска датчика ток поступает в одну ветвь дифференциальной обмотки возбудителя, а при вращении диска приемника — в другую, причем вследствие соответствующего размещения контактов датчика и приемника и равных величин их наборов сопротивлений перемещение диска датчика относительно нулевого положения сопровождается строго соответствующим ему перемещением диска приемника относительно своего нулевого положения.
Так как диск датчика механически связан со штурвалом, а диск приемника — с рулем, то по величине угла перемещения штурвала можно точно судить о величине угла перекладки руля, что является весьма ценной особенностью системы следящего действия.
Другим важным качеством этой системы является автоматическое возвращение руля в прежнее положение при каком-либо произвольном его смещении. Произвольное отклонение руля сопровождается перемещением диска приемника, т. е. нарушением равновесия токов в дифференциальной обмотке возбудителя, вследствие чего рулевой двигатель приходит в движение и возвращает руль в прежнее положение.
В рассмотренной схеме управления устройство датчика и приемника рассчитано на перекладку руля в пределах до 40° на каждый борт.
Управление электромеханическими приводами при непосредственном питании исполнительного электродвигателя (ИД) от цепи осуществляется по контакторной схеме. При переменном токе находят ограниченное применение полюсопереключаемые асинхронные двигатели с короткозамкнутым ротором.

При постоянном токе применяют контакторные схемы с резисторами в цепи якоря, обеспечивающие необходимую мягкую характеристику и возможность стоянки ИД под током. Однако такие схемы применяют при малых мощностях из-за их низкой надежности и неэкономичности, а также в связи с преимущественным распространением переменного тока.
Наибольшее применение для электромеханических приводов нашла система Г—Д, обеспечивающая сравнительно высокую надежность, широкое и плавное регулирование скорости и удобную форму механических характеристик с ограничением момента и тока стоянки ИД путем установки на генераторе противокомпаундной обмотки.

Рис. 1. Схема рулевого электропривода по системе Г-Д
Полярность генератора изменится, М вращается в другую сторону, возвращая руль в исходное положение. Резкий перевод рукоятки ПУ в нулевое положение приводит к интенсивному рекуперативному торможению. Генератор работает как двигатель последовательного возбуждения, отдавая энергию в сеть через приводной двигатель. Резкий реверс может привести к противовключению, когда токи превосходят ток стоянки, чего следует избегать.
Схема обеспечивает ограничение момента и тока стоянки двигателя действием размагничивающей обмотки генератора ПКО. Резистор R4 служит для наладки схемы: увеличение сопротивления дает снижение всех четырех механических характеристик двигателя, а шунтирование — к возрастанию частоты вращения М на всех положениях рукоятки ПУ.
Резисторы R6 и R7 предохраняют НОГ и НОД от межвиткового пробоя изоляции при коммутации их цепей. Оперативные цепи защищены от токов КЗ предохранителями.
Управление рулем простое: для установки руля в нужную позицию необходимо вернуть рукоятку ПУ в нулевое положение, когда руль подходит к требуемому углу. Для этой цели возле ПУ устанавливают аксиометр.
В эксплуатации схема проста и надежна. Необходим общий уход за состоянием контактных поверхностей постов управления, конечных и путевых выключателей, а также за состоянием коллекторов, щеток машин и подшипников. Нужно следить за уровнем напряжения возбудителя. Заниженное напряжение возбуждения ведет к увеличению токовых нагрузок в якорной цепи, а повышенное — к перегреву обмотки возбуждения машин.
Управление гидравлическими рулевыми приводами с непрерывно вращающимися насосами призвано обеспечить надежный пуск электродвигателя, его остановку, а также сигнализацию о перегрузке, исчезновении питания и др.
На рис. 2 приведена полная принципиальная схема управления электроприводами насосов левого I и правого II бортов со 100%-ным резервированием. Питание на щит рулевого устройства подается от ГРЩ и АРГЦ через контакторы 1К и 2К. Первым сработает тот из них, на который раньше будет подано напряжение. Второй будет отключен блокировочным размыкающим контактом первого контактора. При исчезновении питания контактор отпустит якорь, главные его контакты разомкнутся, а блокировочные включат второй контактор, что обеспечивает бесперебойность питания схемы.
После подачи напряжения на схему через трансформатор 1ТР получат питание сигнальные лампы 1ЛЖ в румпельном отделений и 2ЛЖ на мостике, сработает реле 7Р на пульте управления главным двигателем и включит световую сигнализацию о наличии питания на РЭГ (на рисунке не показана).
Для пуска насоса, например, левого борта необходимо на мостике включить выключатель 1ВД. Он установлен в пульте авторулевого. Пуск из румпельного отделения переключателем 1BM можно выполнить независимо от положения 1ВД. Включение контактора Л1 обеспечит прямой пуск двигателя и подачу питания на трансформатор 2Тр, к которому подключен авторулевой (канал левого борта) и цепи сигнализации. Реле Р1 отключит выпрямитель В1 и питаемое им реле времени PВ1. Реле Р6 включит световую сигнализацию в машинном отделении, а реле Р2 подготовит цепь питания сигнализации о перегрузке двигателя.

Рис. 2 Схема электропривода насосов РЭГ: I — насос ЛБ; II — в схему авторулевого; III, IV — питание авторулевого соответственно левого и правого бортов; V — насос ПБ
При перегрузке двигателя сработают тепловые реле РТ1, РТ2 и обесточат реле Р1, которое одним контактом включит реле РВ1, а другим — ревун РВП на мостике. Реле РВ1 разомкнет контакты в своей цепи и с выдержкой времени снова замкнет их,-включив собственную катушку, что вызовет новое срабатывание реле и т. д. Контакты РВ1 подадут мигающий сигнал лампой ЛЖЗ на пульте авторулевого. Для прекращения звукового сигнала служит кнопка сброса сигнала КнСС, которая включает реле Р5, прерывающее цепь ревуна. Кнопка КнСС, реле PBt, РВ2, Р1—Р5 установлены на мостике, в пульте судовождения, а Р6, Р7, Р8 —в пульте сигнализации машинного отделения. Остальное оборудование находится в румпельном отделении. Защита главных цепей от токов КЗ осуществляется установочными автоматами с максимальными расцепителями на ток мгновенного расцепления, равный (7 - 10)Iн. Защита цепей управления выполнена предохранителями.
Следует учитывать отсутствие в схеме минимально-нулевой защиты: если напряжение глубоко понизится или исчезнет вовсе, а затем восстановится, произойдет самопроизвольный пуск включенного насоса. Поэтому в эксплуатации подавать питание на привод нужно, лишь убедившись в возможности пуска насоса или в том, что выключены 1ВМ, 2ВМ.
Так как привод — нереверсивный, нерегулируемый, имеет редкие пуски и остановки, контактная аппаратура не подвержена интенсивному износу, но нуждается в периодических осмотрах и чистке. Необходимо следить также за исправностью сигнализации, реле и ламп и уровнем сопротивления изоляции аппаратуры.
Автоматическое управление рулевыми электроприводами осуществляется с помощью авторулевых, имеющих большое многообразие и различающихся по закону (алгоритму) управления, по схемному решению, реализующему данный закон управления, по характеру действия (непрерывного или дискретного), по виду усилителей мощности (с полупроводниковыми, ламповыми, магнитными, электромашинными), по конструктивному исполнению отдельных узлов и блоков и т. д. Несмотря на различия, современные авторулевые имеют много общего в принципе действия, настройке, обслуживании и уходе.
Рассмотрим схему авторулевого типа АТР2-10 (рис. 3). В комплект АТР2-10 входят: пульт управления ПУ, два исполнительных механизма ИMl с вращательным движением выходного валика или ИМ2 с поступательным движением выходной рейки, рулевой датчик РД. В прибор РД входят: сельсин-датчик рулевых указателей (на схеме не показан), два сельсина типа БД-404А, работающие в режиме вращающихся трансформаторов обратной связи по истинному углу перекладки руля (на схеме МЗРД) и конечные выключатели КП1РД и КП2РД. В исполнительном механизме установлены: двухфазный асинхронный двигатель М1ИМ1 типа АДП-262, сельсин БД-404А в качестве вращающегося трансформатора по заданному углу перекладки руля М2ИМ1, электромагнитная муфта ЭМ, комплект диодов Д1—Д8. Остальные элементы схемы расположены в пульте. На схеме показан левый канал управления. Для правого канала, кроме упомянутых элементов (ИMl правого борта, сельсин БД-404А в приборе РД) в ПУ установлен двойной комплект сельсинов — трансформаторов М2ПУ, усилителей УП1 и У—1М, трансформаторов Тр1, Тр3, Тр4.

Рис. 3. Схема авторулевого АТР-10: положение переключателя В1: 1 — простой; 2 — следящий; 3 — автомат
Поворот штурвала приводит к развороту ротора М2ПУ, вторичная э. д. с. которого, пропорциональная углу (точнее синусу угла) разворота, поступит на вход усилителя У-1М. С выхода усилителя получит питание управляющая обмотка В1—В2 двигателя Ml, который начнет вращаться, задавая производительность насосу. Одновременно поворачивается ротор М2ИМ1, выдавая э. д. с. в противофазе с э. д. с. М2ПУ. Когда Ml развернет М2ИМ1 на угол, при котором э. д. с. М2ПУ и М2ИМ1 почти уравняются, сигнал на выходе усилителя станет близким к нулю, Ml остановится, будучи не в состоянии преодолеть действие пружины нулевого установителя. Однако происходит перекладка руля, поскольку ИMl сместил с нейтрали золотник гидроусилителя и манипулятор насоса. Вместе с баллером руля поворачивается ротор МЗРД, э. д. с. которого так же, как и э. д. с. М2ИМ1 находится в противофазе с э. д. с. М2ПУ. На входе усилителя сигнал уменьшается до нуля, действием пружин нулевого установителя И Ml возвращается в исходную позицию. Когда руль отклонится на заданный угол, ИМ1 вернется в нейтраль.
Действие тахометра скажется в следующем:
Действие интегрирующего устройства состоит в следующем. При симметричных рысканиях судна сигнал интегратора равен нулю, так как М10 практически остается в нулевом положении. При появлении асимметричных по углу или времени (или по тому и другому) рысканиях судна, вызванных асимметрией сопротивления воды движению судна, неодинаковым упором винтов и др., за каждую пару несимметричных уклонений судна от курса ротор М10 окажется повернутым на некоторый, хотя и небольшой угол. В дальнейшем этот угол будет накапливаться до тех пор, пока это не вызовет закладку руля на такой угол, ври котором односторонние возмущения на корпус судна будут скомпенсированы рулем, т. е. пока рыскания не станут симметричными. Компенсация односторонних рысканий интегрирующим устройством, при прочих равных условиях, увеличивает точность удержания судна на курсе.
Для выработки таких рекомендаций необходимы весьма тщательные, продолжительные испытания для каждой серии судов в различных условиях. Поэтому при эксплуатации авторулевых очень важно знать их возможности, а при правильном отношении и должном внимании всегда можно выполнить настройку, близкую к оптимальной. При этом важно помнить, что увеличение сигнала по производной (тахометр) хотя и увеличивает точность судна на курсе, ведет к увеличению числа и углов перекладки руля, что может привести к снижению скорости судна и повышенному износу привода. Выигрыш за счет спрямления траектории окажется утерянным из-за снижения скорости. Лишь при спокойном море можно использовать наибольшие значения уставок регулятора тахометра.
Следует учитывать также взаимозависимость оптимальных настроек регуляторов тахометра и Ко.с при увеличении сигнала тахометра коэффициент обратной связи следует несколько увеличить, так как углы закладки возрастут из-за увеличения сигнала на входе усилителя, что приведет к завышенным углам закладки руля.
Общие положения по эксплуатации рулевых электроприводов вытекают из требований к ним и ПТЭ судового электрооборудования. В неоговоренной части следует руководствоваться заводскими указаниями и инструкциями по эксплуатации.
Перед выходом судна в море необходимо: произвести внешний осмотр всего электрооборудования; замерить сопротивление изоляции всех цепей привода; проверить работу электропривода в действии со всех постов, для всех агрегатов и всех видов управления; доложить вахтенному штурману о готовности рулевого электропривода к выходу судна в море.
В процессе проверки следует обратить внимание на точность отработки угла по аксиометру и согласованность рулевых указателей с истинным положением руля по градусным отметкам на самом приводе. Во время работы проверить состояние подшипников на шум и нагрев. Необходимо также проверить действие предусмотренных видов сигнализации, наличие и исправность сигнальных ламп. Особое внимание при осмотре оборудования во
всех случаях нужно обращать на состояние контактов, особенно для часто коммутируемых цепей. В случае каких-либо неисправностей, требующих для устранения значительных затрат времени или разборки, вывода оборудования из действии, необходимо немедленно доложить об этом вахтенному штурману.
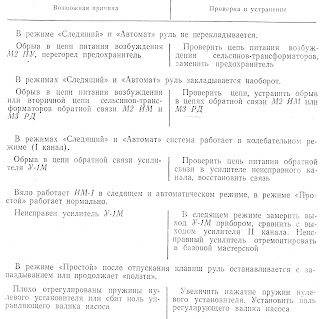
Таблица 1. Неисправности авторулевого
В процессе эксплуатации на ходу судна необходимо ежедневно осматривать оборудование, периодически проверять плотность контактных соединений и выводов, особенно в румпельном отделении, подверженном значительным вибрациям. Кроме общего контроля изоляции, проводят периодические проверки ее уровня для резервных, неработающих агрегатов и элементов схемы управления.
Читайте также: