
Кинематическая схема мальтийского креста
Описание кинематической схемы и определение основных размеров мальтийского механизма с внешним зацеплением и прямолинейными пазами креста. Расчет коэффициента времени работы механизма и проведение силового расчета. Расчет контактных напряжений креста.
| Рубрика | Производство и технологии |
| Предмет | Расчет и конструирование механических узлов автоматизированных систем |
| Вид | практическая работа |
| Язык | русский |
| Прислал(а) | Барсуков И.В. |
| Дата добавления | 03.10.2019 |
| Размер файла | 560,8 K |
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
Подобные документы
Кинематический анализ мальтийского механизма. Определение угловой скорости и ускорения креста. Кинематический анализ планетарной передачи, кривошипно-ползунного механизма. Приведение моментов инерции звеньев и определение момента инерции маховика.
контрольная работа [368,7 K], добавлен 10.10.2011
Постановка задач проекта. Синтез кинематической схемы механизма. Синтез рычажного механизма. Синтез кулачкового механизма. Синтез зубчатого механизма. Кинематический анализ механизма. Динамический анализ механизма. Оптимизация параметров механизма.
курсовая работа [142,8 K], добавлен 01.09.2010
Расчет мощностей, передаточного отношения и крутящих моментов. Выбор материала зубчатых колес и определение допускаемых напряжений. Геометрический расчет зубчатых передач с внешним зацеплением. Расчет валов на выносливость. Проверка прочности шпонок.
курсовая работа [375,4 K], добавлен 16.12.2013
Расчет вала на изгиб и сечения балки. Разработка конструкции узла механизма. Выбор кинематической схемы аппарата. Описание предлагаемой конструкции. Расчет геометрических параметров пружины. Расчет погрешности механизма датчика для второго положения.
курсовая работа [2,0 M], добавлен 24.12.2011
Структурное и кинематическое исследование рычажного механизма. Построение кинематической схемы, планов скоростей и ускорений. Силовой расчет рычажного механизма. Определение сил, действующих на звенья механизма. Замена сил инерции и моментов сил.
Механизмы рассматриваемого типа чаще всего используются в машинах-автоматах I класса для осуществления транспортного периодического перемещения ОО. В тех случаях, когда перемещение происходит по дуге окружности, т.е. в машинах револьверного типа, механизмы прерывистого вращательного движения (механизмы поворота) применяются непосредственно; при необходимости осуществлять линейное перемещение с остановками эти механизмы включаются в кинематическую цепь соответствующего привода, например, ленточного конвейера.
В машинах-автоматах указанного выше типа объект обработки должен точно фиксироваться в определенном положении во время выполнения технологической операции. Поэтому механизмы поворота используются в совокупности с механизмами фиксации, если они сами не выполняют эту функцию.
Наиболее часто в машинах-автоматах химических производств для получения прерывистого одностороннего вращения используются мальтийские механизмы, рычажно-храповые механизмы в различных модификациях, а также механизмы неполных зубчатых колес.
Мальтийские механизмы различают: по виду зацепления – с внешним и с внутренним зацеплением; по числу водил (кривошипов) – с одним или несколькими водилами; по виду паза – с прямолинейным или криволинейным пазом; симметричные и асимметричные.
Наибольшее распространение получили мальтийские механизмы с внешним зацеплением, одним водилом, прямолинейным пазом, симметричные.
Мальтийский механизм с внешним зацеплением позволяет осуществлять прерывистое вращательное движение ведомого звена в сторону, обратную направлению вращения ведущего звена, и фиксацию ведомого звена в период его выстоя. Механизм (см. рис.10, а) состоит из двух подвижных звеньев – кривошипа (водила) 2 и креста (шайбы) 3, соединенных вращательными парами со стойкой 1. На конце кривошипа установлен ролик (палец, цевка), который в определенные моменты времени входит в пазы креста и поворачивает последний. В том случае, если при входе ролика в паз окружная скорость центра ролика направлена по оси паза, т.е. угол между осями кривошипа и паза равен 90 о , жесткого удара не будет. Однако, как показывает опыт эксплуатации этих механизмов, при большой угловой скорости кривошипа (400 об/мин и более) появляются значительные динамические нагрузки, которые вызывают быстрый износ пазов креста. Точность фиксации положения ведомого звена невысока.
При вращении кривошипа с постоянной угловой скоростью w2 крест вращается с переменной угловой скоростью w3. После поворота кривошипа на угол j1 ролик выходит из паза, и крест, повернувшись за время зацепления с кривошипом на угол y1, останавливается, пока ролик вновь не войдет в зацепление со следующим пазом. Заодно с кривошипом вращается фиксирующий сектор, который в период выстоя креста входит в соответствующее дугообразное углубление креста и, таким образом, предотвращает его поворот под действием сил, приложенных к кресту или к деталям, соединенным с ним.
В период поворота креста его кинематический эквивалент – кривошипно-кулисный механизм (рис. 10, б), в котором сохраняется длина кривошипа r, а расстояние между осями вращения кривошипа и кулисы L равно межосевому расстоянию мальтийского механизма. Таким образом, угловое перемещение креста, его угловую скорость и ускорение следует рассчитывать по формулам для кривошипно-кулисного механизма с качающейся кулисой
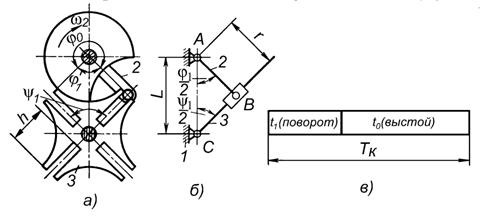
Рис. 10. Мальтийский механизм с внешним зацеплением:
а – схема механизма; б – эквивалентный кривошипно-кулисный механизм; в – циклограмма (1 - стойка; 2 – кривошип; 3 – крест)
Если крест симметричный (имеет постоянный угловой шаг ), то при z пазах
Из прямоугольного треугольника АВС (рис. 8. 1, б), который соответствует начальному положению звеньев мальтийского механизма, т.е. входу пальца кривошипа в паз креста,
Из последнего уравнения следует, что в мальтийском механизме число пазов z ³ 3. Обычно используются мальтийские механизмы с z = 4…12.
Угол поворота кривошипа за время выстоя креста
При постоянной угловой скорости кривошипа отношение времени выстоя t0 креста ко времени его движения t1 пропорционально отношению соответствующих углов j0 и j1:
Принимая во внимание, что в машинах-автоматах револьверного типа основные технологические операции выполняются во время остановки креста, т.е. когда транспортное движение отсутствует, и полагая, что t0 известно, кинематический цикл TКМ мальтийского механизма будет соответствовать рабочему циклу TР автомата и его можно рассчитать по формуле
Циклограмма мальтийского механизма с z = 4 показана на рис. , в.
Из формулы (8. 1) следует, что при заданном tо меньшую длительность рабочего цикла автомата обеспечивает использование мальтийского механизма с небольшим z; с увеличением z время TР возрастает и в пределе при z ® ¥ получим TР = 2 tо.
В некоторых случаях для уменьшения времени поворота между мальтийским механизмом с небольшим числом пазов и поворотным столом вводят зубчатую передачу, что ухудшает условия позиционирования последнего, и требует установки специального устройства, фиксирующего положение стола. Помимо того, использование мальтийского механизма с малым z при большой угловой скорости кривошипа нежелательно из-за значительных инерционных сил, которые будут нагружать не только элементы кинематических пар мальтийского механизма, но и передачу, соединяющую его с поворотным столом.
Размеры звеньев мальтийского механизма с внешним зацеплением связаны соотношениями
r = L sin (p/z) ,
где r – радиус кривошипа;
L – межосевое расстояние.
Радиус описанной окружности креста
R = L cos (p/z).
Глубина паза из условия проворачивания креста
H = L – r – d/2 + D,
где d – диаметр пальца, ролика или цевки;
D - минимальный зазор между пальцем и дном паза.
Если кривошип (водило) и крест (шайба) устанавливаются на валах не консольно, то на их размеры накладываются ограничения, обусловленные размещением валов кривошипа и креста (соответствующие диаметры dв , dш ):
Крест мальтийского механизма при малых его размерах выполняется цельным, а при больших – составным.
Детали креста и оси роликов изготовляются из стали 40Х (ГОСТ 1050-74 * ), закаленной до твердости HRC 50 – 58. Ролики изготовляют из стали ШХ 15 (ГОСТ 801-78) с закалкой до твердости HRC 58 – 62 или из стали 20Х (цементованной и закаленной до HRC 56 – 62).
Посадка ролика (пальца, цевки) в паз креста – H8/f9…H9/e9.


Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰).

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого.
Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим.
© cyberpedia.su 2017-2020 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!
Механизмы мальтийского креста (рис. 6.12) являются, по существу, разновидностью кулисных механизмов (см. рис. 6.10, в). Роль кулисы выполняют по очереди пазы 1 мальтийского креста 2, а роль ползуна – цевка 4.

Рис. 6.12. Механизм мальтийского креста:
1 – паз; 2 – крест; 3 – кривошип; 4 – цевка
Таким образом, крест и приводимые им в движение детали совершают периодические (шаговые) повороты. Времена поворота и выстоя креста определяются скоростью вращения кривошипа и числом пазов креста. Движение креста, как кулисы, является неравномерным – с разгоном и торможением.
Передаточное отношение механизма мальтийского креста u ¹ const. Также и КПД механизма h ¹ const. Примерный вид графиков j = f1(a), = f2(a),, = f3(a), где j – угол поворота креста, a – угол поворота кривошипа, приведен на рис. 6.13.
Максимальная угловая скорость креста равна

, (6.22)
где w1 – скорость вращения кривошипа;

(см. рис. 6.12).

Рис. 6.13. Перемещение, скорость и ускорение мальтийского креста
Максимальное угловое ускорение креста

(6.23)

(6.24)
Длины кривошипа R = O1A и стойки L = О1О2 связаны зависимостью R = Lsin(p/z). Истинные размеры звеньев механизма выбираются исходя из: соображений компоновки, нагрузок в звеньях и шарнирах механизма, жесткости и точности механизма и др.
Механизм мальтийского креста широко применяется в транспортирующих устройствах технологических машин и линий, обеспечивая шаговое перемещение с плавным разгоном и торможением. На рис. 6.14, а изображена схема привода цепного линейного транспортера, а на рис. 6.14, б – схема привода кругового транспортирующего устройства – карусели.

Рис. 6.14. Привод транспортирующего устройства:
а – линейного, б – кругового;
1 – цепной транспортер; 2 – мальтийский крест; 3 – кривошип; 4 – карусель;
5, 6 – зубчатая передача
Кривошип 3 мальтийского механизма закреплен на выходном валу редуктора P. Мальтийский крест в схеме а поворачивает звездочки цепного транспортера, а в схеме б поворачивает шестерню 6 зубчатой передачи. Передача позволяет изменить шаг поворота карусели по сравнению с шагом, определяемым числом пазов креста. Шаг поворота карусели, в этом случае, будет

(6.25)
где u – передаточное отношение зубчатой передачи.
В технологических машинах время выстоя транспортера используется для выполнения какой-либо операции – это рабочее время tp, а время движения – это потери времени, холостое время tx, поэтому стремятся увеличить tp и уменьшить tx.
Если кривошип мальтийского механизма, вращается с постоянной скоростью w1 = const, то угол поворота кривошипа aп (см. рис. 6.12), соответствующий повороту креста на один шаг

(6.26)
Угол поворота кривошипа aв, когда крест стоит

(6.27)
Время поворота креста

(6.28)
Время выстоя креста

(6.29)
Отношение времени поворота и выстоя

(6.30)
Храповые механизмы
Храповый механизм передает движение только в одну сторону и, соответственно, позволяет превратить колебательные движения какого-либо звена механизма в однонаправленные шаговые перемещения. Например, толкатель 1 кулачкового механизма (рис. 6.15) совершает возвратно-качательное движение.

Рис. 6.15. Храповый механизм с приводом от кулачка:
1 – толкатель; 2 – рычаг; 3, 6 – собачка; 4 – пружина; 5 – храповое колесо
На рычаге 2, жестко связанном с толкателем, закреплена шарнирно собачка 3. Собачка поджимается пружиной 4 к храповому колесу 5 и входит в зацепление с зубьями этого колеса. При повороте рычага 2 против часовой стрелки, собачка поворачивает храповик 5, при движении рычага 2 в обратную сторону собачка выходит из зацепления с зубом храповика и храповик остается на месте. Угол поворота храповика на один шаг определяется числом z его зубьев (впадин) Dj = 2p/z.
Для гарантированного попадания собачки в следующую впадину при обратном ходе рычага, угол качания рычага должен быть немного больше угла Dj. Фиксация храпового колеса после завершения его поворота осуществляется различного рода тормозами и фиксаторами. Например, для исключения обратного хода храповика и связанных с ним деталей вводят вторую собачку 6, сидящую на неподвижной оси.
Качательное движение рычага 2 может быть реализовано не только кулачковым механизмом, но и другими механизмами, например, показанными на рис. 6.10. а, в или рис. 6.11.
Довольно часто в машинах применяются линейные храповые механизмы (рис. 6.16). Здесь, храповую рейку 1 толкает подпружиненная собачка 2. Собачку возвратно-поступательно перемещает цилиндр 3. Собачка 4 препятствует обратному ходу храповой рейки.

Рис. 6.16. Линейный храповый механизм:
1 – храповая рейка; 2, 4 – подпружиненная собачка; 3 – цилиндр
Храповой механизм не изменяет закон движения исполнительного звена, который задан кулачком или рычажным механизмом. Передаточное отношение храпового механизма u = 1.
Силовой расчет храпового механизма сводится к определению контактных напряжений в паре зуб-собачка и определению давлений в шарнирах. Передача сил от собачки на зуб храповика наиболее благоприятна при малых углах g между нормалью к грани зуба и линией, соединяющей середину зуба с центром шарнира собачки (рис. 6.16). Но при слишком малых углах g есть опасность выхода собачки из зацепления. Поэтому, рекомендуется выбирать g = 15. 20°. Как и в других, ранее рассмотренных механизмах, выбор размеров храповика, собачки и других деталей храпового механизма определяется множеством факторов, главный из них – компоновка.
Редукторы и мультипликаторы
Редукторы и мультипликаторы предназначены для преобразования движения по скорости (угловой или линейной) и по усилию (моменту или силе). Редукторы и мультипликаторы могут быть вращательные — входное и выходное звено (вал) вращаются, поступательные — входное и выходное звено движутся поступательно и с различным движением звеньев. В последнем случае редуктор дополнительно выполняет функцию преобразования вида движения.
Редукторы
Вращательные редукторы чаще всего выполняются на основе зубчатых передач. Их и различают по виду передач: цилиндрические, конические, червячные, планетарные, волновые. Каждый вид редукторов имеет свои особенности: цилиндрический редуктор имеет высокий КПД, входной и выходной валы у него параллельны; конический редуктор также имеет высокий КПД, и позволяет передать движение через скрещивающиеся валы; червячный редуктор обеспечивает высокую плавность движения, имеет малые габариты, валы у него взаимно перпендикулярны; планетарный редуктор, как и червячный, компактен, входной и выходной валы у него, как правило, соосны; волновой редуктор имеет большое передаточное отношение при малых габаритах, отличается отсутствием геометрического люфта в зацеплении, валы у него соосны. Конечно, каждый тип редуктора имеет свои недостатки, ограничивающие его применение. Например, червячный редуктор. У него пониженный КПД, он требует хорошей смазки и охлаждения, у него ограничена скорость вращения входного вала. При однозаходном червяке, редуктор обладает свойством самоторможения, поэтому, его нельзя применять, если, в процессе движения, момент на выходном валу меняет свой знак (например, при торможении) и может оказаться больше допустимого по условию прочности деталей редуктора. У всех редукторов передаточное отношение

(6.31)
где wвх, jвх– скорость и угол поворота входного вала редуктора;
wвых, jвых – скорость и угол поворота выходного вала редуктора.
Соответственно, скорость выходного вала

(6.32)
Угол поворота выходного вала

(6.33)
Момент на выходном валу

(6.34)
где Мвх – момент на входном валу;
h – КПД редуктора.
КПД редуктора зависит от его типа и величины нагрузки. С уменьшением нагрузки КПД падает. У редукторов с низким КПД и большим передаточным отношением наблюдается самоторможение, приводящее к ударам при реверсе крутящего момента на выходном валу редуктора.
При выборе редуктора по каталогу надо знать номинальную мощность и частоту вращения приводного двигателя, частоту вращения выходного вала редуктора, вращающий момент на выходном валу и эксплуатационный коэффициент нагрузки. Эксплуатационный коэффициент зависит от времени работы редуктора в течение суток, количества включений в сутки и инерции приводимых редуктором механизмов. При большом, приведенном к валу редуктора, моменте инерции возможна значительная ударная нагрузка на редуктор и, соответственно высокий эксплуатационный коэффициент. С помощью эксплуатационного коэффициента учитывают также тепловое состояние редуктора − температуру окружающей среды и относительную продолжительность включения редуктора. Полученный эксплуатационный коэффициент должен быть меньше приведенного в каталоге для каждого конкретного редуктора. В управляемом приводе, при обеспечении плавных пусков и торможений, эксплуатационный коэффициент может быть значительно снижен.
Редукция в поступательном движении может быть обеспечена самыми разными механизмами: клиновыми, рычажными, цепными, на основе зубчатых реек и шестерен и т.п. Простейшим редуктором может служить обыкновенный полиспаст (рис. 6.17).

Рис. 6.17. Полиспаст
Передаточное отношение полиспаста u = vвх/vвых = sвх/sвых равно числу ветвей полиспаста n. В изображенном на рис. 6.17 полиспасте
u = n = 4. Другой часто используемый редуктор − клиновой механизм изображен на рис. 6.18. При малых углах a передаточное отношение может быть очень большим. Здесь u = sвх/sвых = ctg a.

Рис. 6.18. Клиновой механизм
Редукторы с преобразованием вида движения, как и поступательные редукторы, строятся на основе различных механизмов. Часто используется редуктор на основе пары винт-гайка (рис. 6.19). Его передаточное отношение u = wвх/vвых = jвх/sвых = 2p/t, где t – шаг винта.

Рис. 6.19. Редуктор на основе пары винт-гайка
При однозаходном винте с малым шагом, передаточное отношение такого редуктора может быть достаточно большим. Винт, в этом случае можно соединить напрямую с двигателем. А если в качестве винтовой пары использовать ШВП или РВП, получим редуктор без люфтов, высокой точности и жесткости и с высоким КПД.
Мультипликаторы
Поступательные мультипликаторы часто используются в телескопических подъемных механизмах (рис. 6.20).

Рис. 6.20. Телескопический подъемный механизм:
1 – рабочий орган (например, вилы погрузчика); 2 – телескопические рамы; 3 – цепи или тросы; 4 – направляющая; 5 – гидроцилиндр
Передаточное отношение такого механизма

(6.35)
где n – число ветвей цепных или тросовых передач.
В механизме, показанном на рис. 6.20, n = 4, 1/n = 0,25.
Перемещение на выходе

Сила на выходе без учета трения в механизме

Мультипликатор с преобразованием вида движения изображен на рис. 6.21. Он построен на зубчатых передачах рейка-шестерня. Применяются такие мультипликаторы, например, в телескопических платформах.

Рис. 6.21. Мультипликатор с преобразованием вида движения:
1 – ведущая шестерня, 2 – промежуточная рейка, 3 – неподвижная рейка,
4 – промежуточная шестерня, 5 – выходная рейка
Передаточное отношение этого механизма

(6.36)
где u1-2 – передаточное отношение передачи шестерня-рейка (шестерня – 1, рейка – 2),
u2-5 – передаточное отношение передачи рейка-рейка (рейка – 2,
рейка – 5),

Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций.

Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни.
Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим.
© cyberpedia.su 2017-2020 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!
За длительный период развития промышленности было создано довольно большое количество различных конструкций, которые предназначены для перераспределения и передачи усилия. Довольно необычным вариантом исполнения можно назвать мальтийский механизм. Он предназначен для обеспечения прерывистого вращательного движения. Рассмотрим все его подробности, область применения и многие другие моменты.

Принцип действия
В некоторых случаях нужно преобразовывать постоянное вращение в прерывистое. Для этого применяется мальтийский механизм, который сегодня получил весьма широкое распространение. Ключевыми особенностями назовем следующие моменты:
- Устройство представлено двумя элементами, который находятся в непосредственном взаимодействии.
- Основная часть представлена диском со специальными отверстиями. Мальтийский крест выступает в качестве ведомого элемента, которому передается усилие.
- Ведущая часть представлена диском со стержнем, а также специальным элементом, за счет которого обеспечивается крест находится в неподвижном состоянии.
Мальтийский механизм характеризуется тем, что имеет большие размеры в сравнении со многими другими. При этом высокий КПД совместим с равномерной работой.
Ключевыми моментами этого привода можно назвать следующее:
- Оба элемента должны быть расположены точно относительно друг друга, так как в противном случае есть вероятность повышенного износа.
- При производстве изделий должны применяться материалы, характеризующие высокой износостойкостью и прочностью. При этом отметим, что на момент работы не возникает сильного трения, другими словами изделия не нагреваются.
- Несмотря на достаточно простую конструкцию, при изготовлении креста и барабана могут возникать серьезные трудности. Даже незначительное отклонение формы станет причиной потери КПД и возникновения других проблем.
- На момент передачи вращения осевая нагрузка распространяется неравномерно. Именно поэтому есть вероятность быстрого износа подшипника, на котором происходит фиксация креста и барабана.


В целом можно сказать, что принцип работы устройства позволяет его устанавливать в качестве привода самого различного оборудования.
При этом встречаются и модификации, которые также подгоняются под определенные условия эксплуатации.
Структурный анализ механизма
Сегодня в интернете можно встретить чертеж мальтийского механизма, который может применяться изготовления конструкции своими руками. Ключевыми особенностями назовем:
- Рабочий угол.
- Количество лопастей.
- Тип применяемого материала.
- Расположение относительно друг друга.
- Диаметр окружности, описывающий крест и барабан.
Простейший вариант исполнения представлен двумя подвижными звеньями и тремя кинематическими парами. За счет этого обеспечивается равномерность движения. При проектировании приходится проводить достаточно сложно расчеты, которые под силу исключительно профессиональному инженеру.

Кинематика мальтийского механизма
Прежде чем проводить расчеты следует уделить внимание кинематическим особенностям устройства. В качестве основы применяется треугольник с несколькими вершинами, а также цевки, которая формируется при входе в паз и выходе из него. Используя кинематику можно провести следующие расчеты:
- Найти углы поворота на первой и второй фазе.
- Углы и стороны треугольника также считаются важной информацией.
- Угловую скорость и угловое ускорение.

При анализе вращения диска уделяется внимание теореме сложения скоростей и ускорения центра цевки при вращении с равномерной скоростью. Алгоритм расчетов предусматривает применение специальных таблиц.
Как рассчитать самостоятельно?
Самостоятельно провести расчет мальтийского механизма можно после подробного изучения геометрических параметров устройства. Алгоритм проводимых действий выглядит следующим образом:
- Для начала проводится внесение исходных данных в таблицу. Она может быть составлена в произвольной форме.
- Проводится расчет сходных данных к единице времен в применяемой системе СИ.
- Следующий шаг заключается в определении коэффициента движения.
- Применяя табличные данные проводится определение число пазов креста и требуемое число цевок на диске.
- Также нужно определить смещение паза при применении специального равенства.
- Проводится вычисление угловой скорости диска, которая зависит от различных параметров.
- Определяется углы поворота на момент фазы сближения двух элементов конструкции.
- Вычисляется расстояние от центральной части диска до размещения цевки.
- Рассчитывается угол поворота креста на фазе сближения и удаления.
- Определяется коэффициент полезного действия. Этот показатель требуется для вычисления того, насколько эффективным будет в применении устройство.
После получения всей требуемой информации можно провести создание графика зависимости. Он требуется для определения того, насколько проведенные расчеты были правильными. Только после этого можно приступать к непосредственному созданию мальтийского механизма.
Провести рассматриваемые расчеты достаточно сложно, так как они позволяют точно расположить все элементы относительно друг друга.
Если цевка будет смещена от требуемого места всего на несколько долей миллиметра, то может возникнуть биение и другие проблемы.
Область применения
Несмотря в высокой потребности устройства, которое предназначено для преобразования постоянного вращения в прерывистое, применение мальтийского механизма не столь обширно. Это можно связать прежде всего с относительно низкой точностью. Это определяет следующее:
- Как и ранее, сегодня не применяют механизмы для создания киносъемочного оборудования. Исключением можно назвать производство оборудования, которое отвечает за смены положения осветительного оборудования.
- Довольно часто мальтийский крест применяется в случае производства различного станочного оборудования. Он требуется для поворота стала под определенным углом, за счет чего повышается функциональность устройства.
- Больше распространение механизм получил в сфере производства оборудования, где имеются радиальные пазы.
Не стоит забывать о том, что при ускорении вращения барабана есть вероятность износа пальца. Именно поэтому нужно проводить периодическое обслуживание для продления срока службы.


В заключение отметим, что проще приобрести уже готовый вариант исполнения мальтийского механизма. Это связано со сложностями проведения расчетов и непосредственного производства. Стоимость подобного продукта относительно невысокая, интеграция может проводится самым различным образом.
Читайте также: