
Тахометр вентилятора принцип работы
Тахометр – это прибор, который предназначен для отображения числа оборотов двигателя (частоты вращения коленчатого вала).
В основе работы любого двигателя лежит преобразование поступательного движения во вращательное. Это происходит за счет расширения газов в камере сгорания и приведения в действие специальных поршней, которые раскручивают шатунами коленчатый вал двигателя. Обороты коленвала, как раз, и будут считаться оборотами двигателя, которые показывает тахометр.
При нажатии на педаль газа, количество топлива, подаваемое в камеру сгорания двигателя, увеличивается и давление, оказываемое на поршни, повышается. Соответственно, увеличивается частота вращения коленвала и показания тахометра становятся выше.
Для чего нужен тахометр в автомобиле
Данные параметры нужны водителю, когда он переключает передачи на КПП. Если разгонять мотор именно до таких оборотов и сразу же включать следующую передачу, то можно получить самый эффективный разгон.
Вот так тахометр помогает осуществлять грамотное переключение передач и сохранить ресурс двигателя на более долгий срок.
Виды тахометров
Все можно выделить 3 основных вида тахометров. Это – механические, аналоговые и цифровые. Рассмотрим каждый вариант по отдельности.
Является самым первым видом тахометра, который применялся еще на первых автомобилях.
Конструкция такого устройства была предельно проста: прибор с помощью троса присоединялся к коленчатому валу напрямую.
Крутящий момент передавался на шестерню и через трос выходил на подвижную катушку прибора.
Сам прибор представляет собой электромагнит, в котором повышение число оборотов способствовало созданию наибольшей магнитной индукции.
Таким образом, чем выше магнитное поле, тем сильнее отклоняется стрелка на шкале.
Не смотря на простую и надежную конструкцию, такой прибор имеет серьезный недостаток. Дело в том, что точно рассчитать передаточное число шестерней, момент скручивания троса и магнитное поле прибора было невозможным. Поэтому, такой тахометр имел серьезные погрешности до 500 оборотов в минуту.
Аналоговый тахометр представляет собой более усовершенствованный вид механического прибора.
Вместо троса и подключения привода прибора к коленчатому валу стала использоваться катушка зажигания двигателя.
Импульсное напряжение, образованное на катушке зажигания, помимо свечей, поступает в схему измерительного прибора. Тем большее число импульсов окажется в схеме, тем сильнее будет образуемая магнитная индукция. Соответственно, с ростом числа оборотов, растут и показания прибора.
Недостатки аналоговый тахометр перенял от своего предшественника – низкая точность измерений, несмотря на более экономичную и рациональную конструкцию.
Цифровой тахометр также подключается к катушке зажигания, но вместо импульсов, он принимает количество и интервал сигналов с катушки зажигания.
Помимо значений, снимаемых с катушки зажигания, он получает сигналы от датчика холостого хода и датчика коленчатого вала. Такие данные используются для получения более высокой точности измерений. Все они суммируются и исходя из средних значений, получается величина, отображаемая на специальном табло.
Принцип работы
Принцип работы автомобильного электронного тахометра прост. Система зажигания запускает импульс напряжения электромеханической части тахометра, которая реагирует на среднее напряжение импульсов пропорционально частоте вращения двигателя. Сигнал передаётся двойным экранированным кабелем к индикатору. Тахометры имеют температурную компенсацию для обработки измерений в диапазоне -20 до + 70 C окружающей среды.
Он позволяет водителю выбирать подходящие настройки дроссельной заслонки и шестерни во время движения, поскольку длительное использование на высоких скоростях вызывает недостаточную смазку, влияющую на двигатель, создаёт перегрев и приводит к ненужному износу трущихся деталей и к отказу машины.

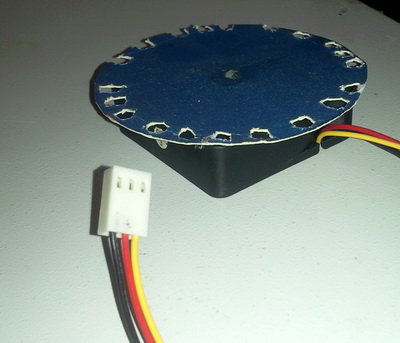
Распиновка проводов кулера Сегодня о том, как считывать обороты компьютерного кулера с помощью его встроенного тахометра.
На фото обыкновенный компьютерный вентилятор с трехпроводным подключением. Два провода красный и черный это питание с массой, и желтый, по которому комп определяет с какой скоростью крутится пропеллер.
Работает этот выход довольно просто, выход соединяется с массой, когда крыльчатка находится в определенном положении, можно даже подключить тестер и посмотреть, как это происходит. Только без питания ничего работать не будет, поэтому я его подключил к 5 вольтам от пальчиковых батареек. Конкретно этот кулер замыкает выход 2 раза на 1 оборот, соответственно к нему можно подключить оттягивающий резистор и снимать показания как с энкодера.



Схема подключения кулера к Arduino

+12 вольт подключается только к кулеру, к его красному проводу и никуда больше. Выход тахометра, желтый провод, подключается к нулевому прерыванию Arduino на UNO это второй вход и он же подтягивается резистором к ардуиновским 5 вольтам. Ну и, конечно же, у нас общая масса с кулером и его питанием. Теперь можно подавать питание.
Описание кода.
В коде заводим переменную
и функцию обработчика прерываний, которая будет плюсовать к переменной единицу.
В setup конфигурируем прерывания, оно у нас CHANGE,
то есть будет выполняться когда состояние на входе изменится и когда будет изменяться состояние на входе будет прибавляться единица к переменной val.
В цикле сбрасываем переменную на 0 и ждем пол секунды пока набежит значение, ждем пол секунды а не секунду потому что прерывание срабатывает 2 раза за 1 импульс от чего можно считывать в 2 раза чаще.
После рассчитываем обороты в минуту и отправляем в serial, то есть количество импульсов в секунду множим на 60 и делим на 2, так как у нас 2 импульса за оборот. И еще отправляем значения из переменной val.
Так же можете посмотреть видео как подключить куллер к Arduino и определить его обороты.
Добрый день.
Выношу на Ваше рассмотрение схему простенького цифрового тахометра на AVR ATtiny2313, КР514ИД2, и оптопаре спроектированного мною.
Сразу оговорюсь: аналогичных схем в интернете много. У каждой реализации свои плюсы и минусы. Возможно, кому-то мой вариант подойдет больше.
Начну, пожалуй, с тех. задания.
Задача: нужно сделать цифровой тахометр для контроля оборотов электрического двигателя станка.
Вводные условия: Есть готовый реперный диск на 20 отверстий от лазерного принтера. В наличии много оптопар от сломанных принтеров. Средние (рабочие) обороты 4 000-5 000 оборотов/минуту. Погрешность отображаемых результатов не должна превышать ± 100 оборотов.
Ограничение: питание для блока управление составляет 36В (тахометр будет установлен в один корпус с блоком управления – об этом ниже).
Маленькое лирическое отступление. Это станок моего друга. На станке установлен электромотор PIK-8, обороты которого контролируются согласно найденной в интернете и модифицированной схеме. По просьбе друга и был разработан простенький тахометр для станка.
Изначально в схеме планировалось применить ATMega16, но рассмотрев условия, решено было ограничиться ATtiny2313, работающего от внутреннего (RC) генератора на частоте 4 Мгц.
Общая схема выглядит следующим образом:

При необходимости внесения изменений в прошивку тахометра на плате предусмотрен разъем ISP.
На схеме подтягивающий резистор R12, номиналом 30 кОм, подобран опытным путём для конкретной оптопары. Как показывает практика – для разных оптопар он может отличаться, но среднее значение в 30 кОм должно обеспечить устойчивую работу для большинства принтерных оптопар. Согласно документации к ATtiny2313, величина внутреннего подтягивающего резистора составляет от 20 до 50 кОм в зависимости от реализации конкретной партии микроконтроллеров, (стр. 177 паспорта к ATtiny2313), что не совсем подходит. Если кто захочет повторить схему, может для начала включать внутренний подтягивающий резистор, возможно у Вас, для Вашей оптопары и вашего МК работать будет. У меня, для моего набора не заработало.

Так выглядит типичная оптопара от принтера.
Светодиод оптопары запитан через ограничивающий резистор на 1К, который я разместил непосредственно на плате с оптопарой.
Для фильтрации пульсаций напряжения на схеме два конденсатора, электролитический на 220 мкФ х 25В (что было под рукой) и керамический на 0,1 мкФ, (общая схема включения микроконтроллера взята из паспорта ATtiny2313).
Для защиты от пыли и грязи плата тахометра покрыта толстым слоем автомобильного лака.
Замена компонентов.
Можно применить любой светодиодный индикатор на четыре цифры, либо два сдвоенных, либо четыре поодиночных. На худой конец, собрать индикатор на отдельных светодиодах.
Вместо КР514ИД2 можно применить КР514ИД1 (которая содержит внутри токоограничивающие резисторы), либо 564ИД5, К155ПП5, К155ИД9 (при параллельном соединении между собой ножек одного сегмента), или любой другой преобразователь двоичного в семисегментный (при соответствующих изменениях подключения выводов микросхем).
Транзисторы VT1-VT4 – любые слаботочные, работающие в режиме ключа.
Принцип работы основан на подсчете количества импульсов полученных от оптопары за одну секунду и пересчет их для отображения количества оборотов в минуту. Для этого использован внутренний счетчик Timer/Counter1 работающий в режиме подсчета импульсов поступающих на вход Т1 (вывод PD5 ножка 9 МК). Для обеспечения стабильности работы, включен режим программного подавления дребезга. Отсчет секунд выполняет Timer/Counter0 плюс одна переменная.
Расчет оборотов, на чем хотелось бы остановиться, происходит по следующей формуле:
M = (N / 20) *60,
где M – расчетные обороты в минуту (60 секунд), N – количество импульсов от оптопары за одну секунду, 20 – число отверстий в реперном диске.
Итого, упростив формулу получаем:
M = N*3.
Но! В микроконтроллере ATtiny2313 отсутствует функция аппаратного умножения. Поэтому, было применено суммирование со смещением.
Для тех, кто не знает суть метода:
Число 3 можно разложить как
3 = 2+1 = 2 1 + 2 0 .
Если мы возьмем наше число N сдвинем его влево на 1 байт и приплюсуем еще одно N сдвинутое влево на 0 байт – получим наше число N умноженное на 3.
В прошивке код на AVR ASM для двухбайтной операции умножения выглядит следующим образом:
Mul2bytes3:
CLR LoCalcByte //очищаем рабочие регистры
CLR HiCalcByte
mov LoCalcByte,LoInByte //грузим значения полученные из Timer/Counter1
mov HiCalcByte,HiInByte
CLC //чистим быт переноса
ROL LoCalcByte //сдвигаем через бит переноса
ROL HiCalcByte
CLC
ADD LoCalcByte,LoInByte //суммируем с учетом бита переноса
ADC HiCalcByte,HiInByte
ret
Проверка работоспособности и замер точности проводился следующим образом. К вентилятору компьютерного куллера был приклеен картонный диск с двадцатью отверстиями. Обороты куллера мониторились через BIOS материнской платы и сравнивались с показателями тахометра. Отклонение составило порядка 20 оборотов на частоте 3200 оборотов/минуту, что составляет 0,6%.
Вполне возможно, что реальное расхождение составляет меньше 20 оборотов, т.к. измерения материнской платы округляются в пределах 5 оборотов (по личным наблюдениям для одной конкретной платы).
Верхний предел измерения 9 999 оборотов в минуту. Нижний предел измерения, теоретически от ±10 оборотов, но на практике не замерялся (один импульс от оптопары в секунду дает 3 оборота в минуту, что, учитывая погрешность, теоретически должно правильно измерять скорость от 4 оборотов в минуту и выше, но на практике данный показатель необходимо завысить как минимум вдвое).
Отдельно остановлюсь на вопросе питания.
Вся схема питается от источника 5В, расчетное потребление всего устройства не превышает 300 мА. Но, по условиям ТЗ, тахометр конструктивно должен находится внутри блока управления оборотами двигателя, а к блоку от ЛАТРа поступает постоянное напряжение 36В., чтобы не тянуть отдельный провод питания, внутри блока установлена LM317 в паспортном включении, в режиме понижения питания до 5В (с ограничивающим резистором и стабилитроном для защиты от случайного перенапряжения). Логичнее было бы использовать ШИМ-контроллер в режиме step-down конвертера, на подобии МС34063, но у нас в городе купить такие вещи проблематично, поэтому, применяли то, что смогли найти.

Фотографии платы тахометра и готового устройства.


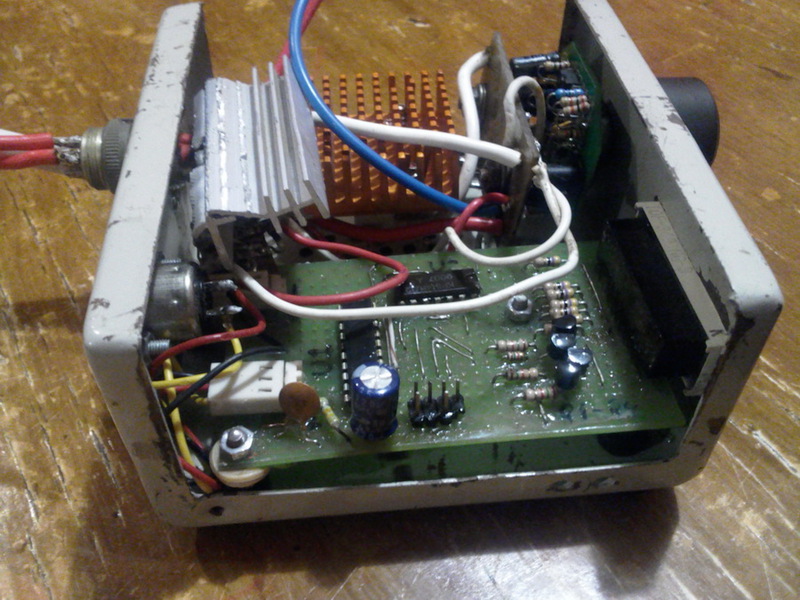
К сожалению, сейчас нет возможности сфотографировать на станке.
После компоновки плат и первой пробной сборки, коробка с устройством отправилась на покраску.
В случае, если у Вас тахометр не заработал сразу после включения, при заведомо верном монтаже:
1) Проверить работу микроконтроллера, убедится, что он работает от внутреннего генератора. Если схема собранна правильно – на циферблате должно отображаться четыре нуля.
2) Проверить уровень импульсов от оптопары, при необходимости подобрать номинал резистора R12 или заменить схему подключения оптопары. Возможен вариант обратного подключения оптотранзистора с подтяжкой к минусу, с включенным или нет внутренним подтягивающим резистором МК. Также возможно применить транзистор в ключевом (инвертирующем) режиме работы.


Делаем тахометр из комп. кулера. Измерения получаются достаточно точными.
- Вы не можете создать новую тему
- Вы не можете ответить в тему
Берем кулер и опиливаем у него лопасти. Далее лепим из пластилина шарик и прилепливаем на кулер(который мы обработали) и делаем чтучку в виде конуса. Далее берем то на чем будем мерять обороты, в моем случае электромотор на который я надел шестерню. И шестерней приделываем к пластилину на кулере. Делаем так чтобы все стояло ровно и не было вибрации при вращении, если у вас руки ровные все отлично получится, а тобы это сделать надо какую-нибудь подставку или даже мотораму для мотора.
Самое главное:
Кулер нужен с 3-МЯ(. ) проводками Один из которых ЖЕЛТЫЙ, ВСЕ ПРОВОДА КРОМЕ ЖЕЛТОГО отрезаем, и подсоединяем в разьем на материнке под кулер.
Включаем комп, качаем програмку спидфан
Устанавливаем ее, запускаем, включаем мотор и смотрим на экран. Если показыввает на каком-нибудь кулере более 5000 значит это оно! Значит вы все сделали правильно. Ну 5000 я показал к примеру, на самом деле обороты показывает гораздо большие!
На торрент то зачем ссылка?

не рискну открывать свой системник , но идея хорошая. Небольшой кусочек велосипедного ниппеля в качестве переходника скорее всего решит вопрос вибрации
Те кто HE делал такой вещицы просьба, очень большая- не писать чушь! Все вопросы не качающиеся темы в ЛС! Причем это указано в правилах. А не читающие их обычно школота и т.д.
Читайте также: