
Схемы управления работой исполнительных механизмов типа эбу

Электрические исполнительные механизмы с электродвигателем предназначены для перемещения различных органов запорно-регулирующей трубопроводной арматуры поворотного принципа действия (шаровые и пробковые краны, поворотные дисковые затворы, заслонки).
Основными узлами исполнительного механизма являются: электродвигатель, редуктор, ручной привод, блок сигнализации положения. В механизмах используются синхронные и асинхронные двигатели переменного тока. Понижение частоты вращения и увеличение крутящего момента осуществляются при помощи комбинированных червячно-зубчатых передач. Ручное управление производится при помощи ручного привода. Воздействие на штурвал нажатием вдоль оси вала при остановленном двигателе приводит к зацеплению ручного привода с валом электродвигателя и передаче крутящего момента на выходной вал.
Исполнительные механизмы с электродвигателем бывают однооборотные и многооборотные, позиционные и пропорциональные. Схема двухпозиционного исполнительного механизма с двухфазным конденсаторным электродвигателем приведена на рис. 1(а).
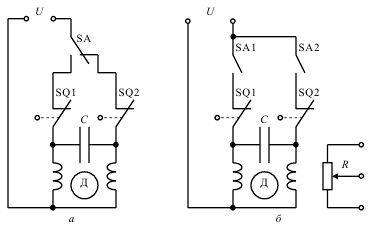
Рис. 1. Схемы исполнительных механизмов с двухфазными электродвигателями: а — схема двухпозиционного исполнительного механизма; б - схема пропорционального исполнительного механизма
Переключатель SA задает направление вращения ротора электродвигателя, подключая конденсатор С либо к одной, либо к другой обмотке электродвигателя. Если переключателем SA замкнуть цепь, содержащую SQ1, то электродвигатель включается и перемещает выходной орган исполнительного механизма до тех пор, пока он не достигнет крайнего положения и не переключит концевой выключатель SQ1. При этом контакт SQ1 разомкнётся, двигатель отключится. Чтобы перевести выходной орган в другое крайнее положение, необходимо переключить SA. Двигатель реверсируется и будет работать до размыкания контакта концевого выключателя SQ2.
Схема пропорционального исполнительного механизма представлена па рис. 1(б). Замыкание контакта SA1 вызывает перемещение выходного органа исполнительного механизма в прямом направлении, а замыкание SA2 - в обратном. Разомкнув контакт, можно остановить механизм в любом промежуточном положении выходного органа. Потенциометр R используется в качестве датчика положения. Концевые выключатели SQ1 и SQ2 отключают электродвигатель в крайних положениях, защищая механизм от поломки.
Схема исполнительного механизма с трехфазным электродвигателем представлена на рис. 3.
Такой исполнительный механизм может использоваться, например, для управления задвижкой. Схема содержит контактор КМ1, включающий механизм на открывание задвижки, с кнопкой SB1 "открыть" и контактор КМ2 с кнопкой SB2 "закрыть". Концевой выключатель SQ1 срабатывает в крайнем положении "закрыто". На схеме концевые выключатели изображены в среднем положении задвижки, ни один из них не сработал.
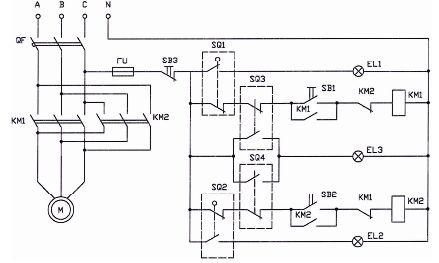
Рис. 2. Схема исполнительного механизма с трехфазным электродвигателем
При нажатии кнопки SB1 сработает КМ1 и включит электродвигатель на открывание задвижки. В крайнем открытом положении сработает SQ1 и своим размыкающим контактом отключит КМ1 и, соответственно, электродвигатель, а замыкающим контактом включит лампочку сигнализации EL1 "открыто".
Если после этого нажать кнопку SB2, то сработает КМ2 и включит электродвигатель на закрывание задвижки. Когда задвижка закроется, сработает SQ2, отключит КМ2 и включит сигнализацию "закрыто" (EL2).
Исполнительный механизм оборудован муфтой предельного крутящего момента. В случае превышения момента на валу, например, при заклинивании задвижки в процессе открывания, сработает выключатель SQ3 и отключит электродвигатель, отключив контактор КМ1. При заклинивании механизма в процессе закрывания сработает SQ4 и отключит КМ2 и электродвигатель. Оба выключателя при срабатывании включают лампу индикации EL3 "авария". Кнопкой SB3 можно остановить электродвигатель в промежуточном положении задвижки.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Так уж сложилось, что прогресс никогда не стоит на месте. И в погоне за лучшими показателями экономичности и мощности двигателей внутреннего сгорания (ДВС), автомобильным инженерам приходится придумывать новые системы, которые смогли бы оптимизировать работу двигателя до необходимых значений. Не забывая при всем при этом, укладываться в современные нормы токсичности отработавших газов.
Назначение систем управления двигателем
Если выразиться проще, то главным условием для лучшей работы двигателя, является точное дозирование топливовоздушной смеси, в зависимости от условий работы двигателя. То есть, в нужный момент времени при работе двигателя, необходимо подать точное количество топлива вместе с воздухом и в нужный момент воспламенить его, для получения хороших показателей мощности, топливной экономичности и норм токсичности. Этот момент, является основополагающим при совершенствовании систем управления двигателем.
В прошлом веке, автопроизводители в основном совершенствовали эти системы механическим путем. Пытались модернизировать систему зажигания, поплавковыми камерами карбюраторов регулировали подачу топлива, но все эти попытки оказались тщетны.
Единственно правильным путем оптимизации работы двигателя было создание электронной системы управления двигателем (ЭСУД). Эту систему сейчас используют абсолютно на всех современных автомобилях.
ЭСУД состоит из датчиков, электронного блока управления (ЭБУ), и исполнительных механизмов. То есть ЭСУД нельзя назвать просто компьютером или как его еще называют “инжектором”, так как это в первую очередь система, в которой каждый участник выполняет свою определенную роль.
ЭСУД на разных автомобилях могут отличаться друг от друга, по типу работы датчиков, либо исполнительных механизмов. Но суть всегда остается одной, ЭБУ собирает информацию со всех датчиков о текущем состоянии работы двигателя(положение коленчатого вала, положение и скорость открытия дроссельной заслонки и т.д.), в том числе о намерениях водителя, после чего на основе своего программного обеспечения создает управляющий сигнал на исполнительные механизмы (на топливные форсунки, электробензонасос (ЭБН), регулятор холостого хода (РХХ) и т.д.).
Из чего состоит система управления двигателем
Рассмотрим вкратце каждый датчик:
Датчик положения коленчатого вала (ДПКВ) – является одним из основных датчиков, ЭБУ с его помощью синхронизирует положение коленчатого вала и распределительных валов двигателя. При его неисправности автомобиль либо вообще не заводится, либо на некоторых марках автомобилей заводится, но работает в аварийном режиме и соответственно автомобиль не развивает своей полной мощности.
Датчик положения распределительного вала (ДПРВ) – используется для определения положения распределительного вала, соответственно так же как и ДПКВ, участвует в синхронизации коленчатого вала и распределительного вала. Нужен для осуществления фазированного впрыска.
Датчик положения дроссельной заслонки (ДПДЗ) - отслеживает угловое положение дроссельной заслонки и преобразует его в сигнал постоянного напряжения. Используется для стабилизации всех режимов работы двигателя, от холостого хода до полной нагрузки.
Датчик кислорода (ДК) - определяет количество кислорода в выхлопных газах, после чего ЭБУ корректирует подачу топлива пытаясь достичь стехиометрической смеси.
Датчик массового расхода воздуха (ДМРВ) - один из основных датчиков, измеряет количество воздуха которое попадает в двигатель. На основе этого параметра определяется необходимое количество топлива для соответствующего режима работы двигателя.
Датчик положения педали сцепления - его основная функция заключается в том, что он снижает рывки при переключении передач.
Датчик положения педали тормоза - используется для переключения режимов АКПП и для системы ABS.
Датчик абсолютного давления во впускном коллекторе (ДАД либо MAP) – как правило используется либо он, либо ДМРВ. Назначение у них одинаковое, отличие в принципе работы. МАР измеряет величину разрежения во впускном коллекторе, и на основе этого ЭБУ делает выводы о расходе воздуха в двигателе.
Датчик детонации – определяет в двигателе детонацию, и смещает при необходимости угол опережения зажигания в более раннюю сторону, т.е. искра на контактах свечи зажигания появляется немного раньше во избежание детонации.
Из исполнительных механизмов стоит отметить:
Регулятор холостого хода (РХХ) – здесь название говорит само за себя, регулирует холостой ход при закрытой дроссельной заслонке.
Топливные форсунки – в момент подачи электрического сигнала от ЭБУ, подают топливо в двигатель.
Катушка зажигания – также в необходимый момент принимает электрический сигнал от ЭБУ, и подает электрический разряд высокого напряжения на свечи зажигания.
Клапан фазорегулятора – на определенных режимах работы двигателя, получает сигнал на смещение шестерни распределительного вала, для получения более высоких показателей мощности двигателя.
Электронный дроссельный узел – применяется в паре с электронной педалью акселератора , в котором присутствует электрический мотор изменяющий угол открытия дроссельной заслонки, при его наличии отсутствуют такие компоненты как РХХ и ДПДЗ, так как они встроены в данный узел.
Ну и наконец, электронный блок управления (ЭБУ) – это так называемые “мозги” системы управления двигателем, именно он определяет какое количество топлива подать в цилиндры двигателя, в определенный момент времени.
Это конечно же не полный список по всем компонентам системы управления двигателем, но наличие каждой из этих деталей является важным условием правильной работы двигателя, более подробно мы их рассмотрим в отдельных статьях.
При получении сигналов от датчиков нередко одна или несколько входных величин влияют на один или несколько выходных параметров. Все эти нюансы предусматриваются программой электронного блока, и он может выбрать наиболее оптимальную команду из предлагаемого программой перечня. Таким образом, ЭБУ автомобильных систем осуществляют функции управления и регулирования для выбора наиболее рационального выходного сигнала к исполнительным устройствам.
Управление
В ЭБУ выходные параметры для исполнительных устройств рассчитываются с использованием входных величин, заданных величин, полей характеристик и алгоритмов. Само воздействие не проверяется (открытый процесс управления). Такой метод используется, например, при программном управлении работой свечей накаливания.
Регулирование
В ЭБУ фактическое значение параметра постоянно сравнивается с его заданной (оптимальной) величиной, и обеспечивается замкнутая последовательность действий (по контуру регулирования). Как только обнаруживается различие, ЭБУ корректирует работу исполнительного механизма.
Преимуществом регулирования является возможность выявления и учета вредных воздействий (помех), например, при регулировании частоты вращения коленчатого вала на режиме минимальных оборотов холостого хода.

Обработка данных
При работе системы электронный блок управления (ЭБУ) принимает сигналы датчиков (входные сигналы), оценивает их и ограничивает допустимыми уровнями напряжения. Некоторые входные сигналы в качестве диагностики проходят проверку на достоверность.
Так, например, микропроцессор ЭБУ дизельного двигателя системы Common Rail рассчитывает момент начала, и продолжительность впрыска топлива с учетом сигналов датчиков и параметров, загруженных в него полей характеристик. Рассчитанные значения преобразуются в выходные сигналы для исполнительных устройств.
Выходными сигналами управляют оконечные каскады, имеющие достаточную мощность для привода исполнительных механизмов (например, форсунок, электромагнитных клапанов высокого давления, клапана рециркуляции отработавших газов и др.).
Дополнительно через сетевой интерфейс происходит обмен сигналами с другими системами автомобиля.
Рассмотрим подробнее, как это происходит.
Датчики и исполнительные механизмы образуют периферию ЭСАУ, а ЭБУ является центром обработки данных. От датчиков на ЭБУ по кабельной разводке и разъемам передаются электрические сигналы, которые могут быть аналоговыми, цифровыми и импульсными (см. рисунок 1).
Аналоговые входные сигналы могут иметь любое (в определенных пределах) значение напряжения. Такие электрические сигналы передают большинство датчиков, где измеряемая физическая величина изменяется и фиксируется непрерывно, например, расход воздуха, давление на впуске двигателя, напряжение аккумуляторной батареи, температура охлаждающей жидкости и воздуха и др.
Импульсные входные сигналы обычно поступают от индуктивных датчиков частоты вращения и положения (например, коленчатого вала, газораспределительного вала). Такие сигналы обрабатываются в соответствующей части схемы ЭБУ, при этом мешающие импульсы (помехи) подавляются, и сами импульсные сигналы преобразуются в цифровые.
Подготовка и обработка входного сигнала
Микроконтроллер является центральным конструктивным элементом ЭБУ (рис. 1), управляет последовательностью функций. Микроконтроллер включает управляющий модуль CPU (Central Processing Unit) или микропроцессор, микрочип со встроенными входными и выходными каналами, таймер, модули ROM и RAM, серийные согласующие устройства и другие периферийные блоки.
Кварцевый тактовый генератор вырабатывает тактовые импульсы для микроконтроллера.
Память для программ и данных нужна микроконтроллеру для реализации расчетов. Программное обеспечение хранится в «памяти» – постоянном запоминающем устройстве (ПЗУ) в форме двоичных числовых значений, разделенных на наборы данных. Модуль CPU считывает эти величины, интерпретирует их как команды и выполняет эти команды по очереди.
ПЗУ включает модули памяти ROM, EPROM или Flash-EPROM. Кроме того, в ПЗУ хранятся специфические данные и параметры (отдельные значения, характеристики и поля характеристик), которые не могут изменяться в процессе эксплуатации автомобиля, но влияют на процесс управления и регулирования программы.
ПЗУ может быть интегрировано в микроконтроллер и при необходимости дополнительно расширено внешними модулями памяти EPROM или Flash-EPROM.
Модуль памяти ROM (Read Only Memory)
Основное ПЗУ выполняется в виде модуля памяти ROM и содержит информацию, предназначенную только для чтения, которая загружается при изготовлении модуля и после этого уже не может быть изменена.
Объем памяти модуля ROM, интегрированного в микроконтроллер, ограничен. Для сложных систем управления (ЭСАУ) требуются дополнительные модули памяти.

Рис. 1. Обработка сигналов в ЭБУ
Модуль памяти EPROM (Erasable Programmable Read Only Memory)
Модуль памяти EPROM это стираемое и перепрограммируемое ПЗУ, хранящее информацию, которая может стираться облучением ультрафиолетовыми лучами и с помощью устройства программирования снова записывается.
Модуль памяти EPROM обычно выполняется как отдельный конструктивный элемент. Управляющий модуль CPU обращается к модулю памяти EPROM через адресную шину и шину данных.
Модуль памяти Flash-EPROM (FEPROM)
Модуль памяти Flash-EPROM обычно сокращенно называют Flash-память. Информация в этот модуль может заноситься и стираться электрически.
ЭБУ с модулями памяти Flash-EPROM может быть перепрограммирован программатором через последовательный интерфейс на станции техобслуживания без вскрытия. Если микроконтроллер дополнительно снабжен модулями ПЗУ, то в них имеются программы для программирования Flash-памяти.
Модули памяти Flash-EPROM вместе с микроконтроллером могут быть интегрированы в микрочип.
Из-за своих преимуществ Flash-EPROM вытесняет использование упрощенных модулей EPROM.
Модуль памяти RAM (Random Access Memory)
Модуль RAM является оперативным запоминающим устройством (ОЗУ), с помощью которого производится чтение/запись всех текущих величин изменяющихся параметров (переменных), например, значений сигналов. Для многозадачного использования емкости одного модуля памяти RAM, интегрированного в микроконтроллер, недостаточно, поэтому требуется дополнительный модуль памяти RAM, который подключается к микроконтроллеру через адресную шину и шину данных.
Если питание ЭБУ отключается, то модуль памяти RAM теряет весь массив данных (это энергозависимая память).
Модуль памяти EEPROM (E2PROM)
Модуль памяти RAM теряет всю информацию, если отключается от источника питания. Данные, которые необходимо сохранить для последующего управления и диагностики системы (например, коды и параметры неисправностей), должны долговременно храниться в модулях, не зависимых от электропитания.
Модуль памяти EEPROM загружается информацией электрически, но в нем, в противоположность модулю памяти Flash-EPROM, информация может стираться и заполняться по отдельности в каждой ячейке памяти.
Модуль памяти EEPROM предназначен для многократного повторения циклов записи/стирания информации и применяется как энергонезависимое устройство чтения/записи.
Модуль ASIC (Application Specific Integrated Circuit)
Модули ASIC это адаптивные интегральные схемы, предназначенные для расширения технических возможностей ЭБУ по расчету данных, когда стандартных микроконтроллеров недостаточно.
Эти интегральные схемы проектируются и изготавливаются по заданию разработчиков ЭБУ. Они могут содержать дополнительный модуль памяти RAM, входные и выходные каналы, самостоятельно генерировать и передавать сигналы ШИМ.
Модуль контроля
Микроконтроллер и модуль контроля взаимно отслеживают действия друг друга путем постоянного обмена информацией в режиме «вопрос - ответ». Если распознана ошибка, то оба устройства независимо друг от друга могут перейти на работу в аварийном режиме.
Выходные сигналы исполнительным устройствам
Микроконтроллер с помощью выходных сигналов управляет выходными каскадами ЭБУ, которые генерируют сигналы достаточной мощности для непосредственного управления исполнительными устройствами, а в некоторых случаях и реле.
Каждый выходной каскад защищен от короткого замыкания и скачков напряжения, а также от разрушения вследствие электрической или тепловой перегрузки. Любой нештатный режим интегральные схемы оконечных каскадов распознают как ошибку, и передают об этом сигнал в микроконтроллер.
Коммутационные сигналы служат для включения и выключения исполнительных устройств (например, электрического вентилятора системы охлаждения двигателя).
Сигналы ШИМ
Цифровые выходные сигналы могут генерироваться как сигналы широтно-импульсной модуляции (ШИМ). Эти сигналы представляют собой последовательность прямоугольных импульсов с постоянной частотой f = 1/T и переменной длительностью t (рис. 2).
С помощью ШИМ-сигнала ЭБУ управляет исполнительными устройствами, приводя их в любое рабочее положение, изменяя параметр сигнала, называемый коэффициент заполнения D = t/T .

Рис. 2. Сигнал ШИМ:
T – период сигнала; t – переменная длительность сигнала
Передача данных внутри блока управления
Периферийные системы, поддерживающие работу микроконтроллера, могут обмениваться с ним сигналами через адресную шину и шину данных. Например, микроконтроллер выдает через адресную шину адрес модуля памяти RAM, по которому должно читаться содержание памяти.
В начале развития автомобильной электроники использовались 8-битные шины из восьми проводников, по которым передавались целые значения величиной до 256.
16-битные адресные шины уже могут обращаться к 65 536 адресам.
Современные электронные системы управления нуждаются в 16- или 32-битной шине данных. Для уменьшения количества электрических выводов, шину данных и адресную шину мультиплексируют, т. е. адреса и данные передают в разное время, при этом используют одни и те же проводники.
Данные, не требующие высоких скоростей передачи (например, данные памяти неисправностей), используют последовательные интерфейсы только с одной линией передачи данных.
Обмен данными между различными ЭСУ автомобиля
В процессе работы электронные системы автомобиля, управляющие различными устройствами и механизмами, взаимодействуют между собой, обмениваясь актуальными данными. Рассмотрим, как осуществляется обмен данными между электронными блоками ЭСУ автомобиля на примере взаимодействия с ЭСУД (электронной системы управления двигателем).
Микропроцессор ЭБУ дизельного двигателя системы Common Rail определяет момент начала и продолжительность впрыска топлива с учетом сигналов датчиков, и рассчитывает текущий расход топлива.
Сигнал расхода топлива передается ЭБУ двигателя 3 (рис. 3) в виде цифрового послания в шину CAN. Особенность шины CAN в том, что при передачи каким-либо ЭБУ послания в шину, оно одновременно поступает на все остальные ЭБУ автомобиля, подключенные к этой шине.
Таким образом, послание от ЭБУ двигателя прочитывается блоком управления комбинации приборов или автономным бортовым компьютером 6, которые демонстрируют водителю данные мгновенного расхода топлива и (или) запаса хода.
В старых электронных системах управления в качестве сигнала расхода топлива использовался ШИМ-сигнал (рис. 1).
Внешняя регулировка крутящего момента обеспечивается изменением подачи топлива под влиянием работы других систем автомобиля, например, антипробуксовочной системы или управления коробкой передач. Эти системы сообщают ЭБУ двигателем об изменении крутящего момента двигателя (обычно, в сторону снижения), а вместе с ним, соответственно, и величины подачи топлива.
Управление генератором 9 (рис. 3) и его диагностика может обеспечиваться через стандартный серийный интерфейс ЭБУ двигателем.
Например, при разряженной аккумуляторной батарее ЭБУ поддерживает повышенную частоту вращения коленчатого вала на режиме минимальных оборотов холостого хода.
В некоторых современных автомобилях управление генератором реализуется чрез шину LIN (Local Interconnect Network – локальная коммутируемая сеть, которая используется для управления электромеханическими компонентами автомобиля).

Рис. 3. Возможные системы для обмена данными с блоком управления работой двигателя:
1 - Блок управления системой стабилизации движения (с ABS и др. системами); 2 - Блок управления КПП; 3 - Блок управления работой двигателя; 4 - Блок управления кондиционером; 5 - Блок управления включением свечей накаливания; 6 - Комбинация приборов с автономным бортовым компьютером; 7 - Электронное противоугонное устройство; 8 - Стартер; 9 - Генератор; 10 - Компрессор кондиционера
Управление стартером 8 (рис. 3) производится ЭБУ двигателем, который обеспечивает блокировку стартера для предотвращения его включение при работающем двигателе.
Блок управления включением свечей накаливания 5 получает от ЭБУ двигателем информацию о моменте начала и продолжительности процесса накаливания свечей, управляет этим процессом и контролирует его. Для проведения диагностики в ЭБУ двигателя сообщается о нарушениях в этом процессе.
При прогреве камер сгорания блок 5 отключает контрольную лампу предварительного прогрева на панели приборов автомобиля.
Электронное блокирование движения необходимо для предотвращения несанкционированное использование автомобиля. Двигатель может запуститься только в том случае, когда электронное противоугонное устройство 7 (рис. 3) разблокирует ЭБУ двигателем.
С помощью пульта дистанционного управления или выключателя стартера и свечей накаливания водитель посылает сигнал на противоугонное устройство, подтверждающий, что он правомочен использовать этот автомобиль.
В этом случае ЭБУ двигателем подключается к остальным системам, и становятся возможными как пуск самого двигателя, так и движение автомобиля.
Кондиционер является частью климатической установки автомобиля и необходим для обеспечения комфортных условий труда водителя при высоких температурах окружающего воздуха.
Кондиционер охлаждает воздух в салоне с помощью компрессора 10, потребляемая мощность которого может составлять до 30% мощности двигателя. При различных условиях движения автомобиля, компрессор кондиционера управляется, в т. ч. ЭБУ двигателем, который может на некоторое время его отключить при резком увеличении оборотов. Так как это отключение кратковременно, оно не произведет заметного влияния на температуру в салоне автомобиля.

Исполнительные механизмы с электродвигателем используются для передвижения органов запорно-регулирующей трубопроводной арматуры с действием поворотного типа. Такая арматура часто встречается на заслонках, дисковых затворах поворотного типа, кранах как шаровых, так и пробковых.
Главные узлы исполнительного механизма представлены электродвигателем, блоком сигнализации положения, ручным приводом и редуктором. Двигатели переменного тока, используемые в механизмах, могут быть синхронными и асинхронными.
Благодаря комбинированным червячно-зубчатым передачам достигается увеличение крутящего момента и понижение частоты вращения.
Ручной привод позволяет осуществлять ручное управление исполнительным механизмом.
Нажатие на штурвал вдоль оси вала, когда двигатель остановлен, повлечет за собой зацепление вала электродвигателя и ручного привода. Таким образом, на выходной вал передастся крутящий момент. По классификации можно разделить исполнительные механизмы на позиционные и пропорциональные, многооборотные и однооборотные. На рис. 1(а) изображен двухпозиционный исполнительный механизм с двухфазным конденсаторным электродвигателем.

Рис. 1. Схемы исполнительных механизмов с двухфазными электродвигателями: а — схема двухпозиционного исполнительного механизма; б - схема пропорционального исполнительного механизма
Схема содержит переключатель SA, два концевых выключателя SQ1 и SQ2, двигатель Д, две обмотки электродвигателя, конденсатор С. Переключением SA в то или иное положение задается направление вращения ротора электродвигателя, поскольку к одной из обмоток подключается конденсатор С. Замкнем переключатель SA в таком положении, чтобы образовалась замкнутая цепь, содержащая концевой выключатель SQ1. Электродвигатель включится и начнет перемещать выходной орган исполнительного механизма, пока тот не окажется в крайнем положении. Тогда концевой выключатель SQ1 переключится, контакт SQ1 разомкнется, и двигатель остановится.
Если теперь переключатель SA перевести в другое положение, то двигатель включится в реверсивном режиме. Двигатель остановится только после размыкания концевого выключателя SQ2. Такой режим работы исполнительного механизма позволит переместить выходной орган в противоположное крайнее положение.
Схема пропорционального исполнительного механизма несколько отличается (изображена на рис. 1 (б)). Она содержит два переключателя SA1 и SA2, два концевых выключателя SQ1 и SQ2, двигатель Д, две обмотки электродвигателя, конденсатор С и потенциометр R.
Здесь за направление перемещения выходного органа отвечают переключатели SA1 и SA2. Чтобы осуществить перемещение в прямом направлении, нужно замкнуть переключатель SA1. Чтобы осуществить перемещение в обратном направлении, нужно замкнуть переключатель SA2.
При необходимости можно остановить механизм, разомкнув переключатели. Тогда выходной орган будет находиться между двумя крайними положениями.
В качестве датчика положения используется потенциометр R. Концевые выключатели SQ1 и SQ2 предназначены для защиты механизма от повреждений. Они отключают двигатель в соответствующем крайнем положении.

Рис. 2. Схема исполнительного механизма с трехфазным электродвигателем
На рис. 2 изображена схема исполнительного механизма с трехфазным электродвигателем. Одна из целей использования такого механизма – это управление задвижкой. На схеме изображены: контакторы КМ1 и КМ2, кнопки SB1 "открыть" и SB2 "закрыть", концевые выключатели SQ1, SQ2, SQ3 и SQ4, лампочки сигнализации EL1, EL2 и EL3. На данной схеме все концевые выключатели находятся в среднем положении задвижки.
Работа схемы осуществляется следующим образом: контактор КМ1 включает механизм на открывание задвижки после нажатия кнопки SB1. Когда задвижка окажется в крайнем положении "открыто", сработает концевой переключатель SQ1, отключив контактор КМ1 и электродвигатель своим разомкнутым контактом. Лампочка сигнализации EL1 включится, так как окажется на замкнутом контакте концевого переключателя SQ1. Эта лампочка является индикатором положения задвижки "открыто".
Чтобы закрыть задвижку, необходимо нажать на кнопку SB2. Тогда сработает контактор КМ2, а механизм включится на закрывание задвижки. При достижении крайнего положения задвижки "закрыто" сработает концевой переключатель SQ2. Он остановит электродвигатель и отключит контактор КМ2. Аналогично первому случаю, включится лампочка EL2, которая является индикатором положения задвижки "закрыто".
В данной схеме используется также муфта предельного крутящего момента. Она работает в паре с концевыми переключателями SQ3 и SQ4 и предназначена для отключения электродвигателя при превышении момента на валу. Это может произойти, например, если задвижку заклинит в процессе перемещения.
Если при этом задвижка будет открываться, то сработает выключатель SQ3 и отключит контактор КМ1. Если задвижка будет закрываться, то сработает выключатель SQ4, отключив контактор КМ2. Лампочка EL3 является индикатором ситуации "авария" и включится в любом из этих двух случаев.
Чтобы остановить электродвигатель в промежуточном положении задвижки, необходимо нажать на кнопку SB3.

Поскольку работа всех систем управления впрыском топлива, которые будут рассматриваться ниже, так или иначе определяется работой ЭБУ, есть смысл сначала, объяснить работу всей системы электронного управления двигателя, а потом рассмотреть отличия и методы диагностики различных систем впрыска. Структурная схема типовой системы управления двигателем изображена на рисунке.
В электронную систему управления двигателя, кроме самого ЭБУ, входят датчики, которые подразделяются на аналоговые и цифровые. Расположение датчиков на двигателе показано на рисунке ниже.

Аналоговые датчики – это датчики, выходным параметром которых является величина напряжения. К ним относятся:
- датчик положения дроссельной заслонки ДПДЗ (поз. 2). Представляет собой потенциометр, движок которого механически соединен с дроссельной заслонкой. При повороте дроссельной заслонки меняется положение движка потенциометра, а следовательно, и выходное напряжение. По величине и скорости изменения этого напряжения ЭБУ определяет степень нажатия на педаль газа;
- датчик абсолютного давления в трубопроводе (датчик МАР) (поз. 21) – это кремниевый кристалл, на поверхности которого сформирован мостик сопротивлений. Ток через мостик изменяется под действием деформаций (пьезорезистивный эффект), вызванных изменением давления. Этот ток усиливается и вводится температурная компенсация. Датчик измеряет изменение давления во впускном трубопроводе, которое зависит от изменения нагрузки двигателя и скорости автомобиля, и преобразует его в напряжение на выходе.
Датчик МАР также используется для измерения барометрического давления при запуске двигателя и других определенных условиях, что позволяет ЭБУ автоматически регулировать качество горючей смеси. ЭБУ подает на вход датчика МАР напряжение 5 В и отслеживает напряжение на линии сигнала. Датчик связан с «массой» через переменный резистор. Сигнал с датчика МАР влияет на подачу топлива и опережение зажигания, определяемые ЭБУ.
- датчик температуры поступающего воздуха (поз. 19) сделан на базе терморезистора с отрицательным коэффициентом сопротивления. По его показаниям ЭБУ корректирует объем впрыска топлива, так как воздух меняет вес в зависимости от температуры.
- датчик температуры охлаждающей жидкости расположен на рубашке охлаждения двигателя (поз. 7) и аналогичен датчику температуры воздуха. По его сигналу ЭБУ оценивает температуру двигателя и обеспечивает обогащение топливной смеси при запуске холодного двигателя.
К цифровым датчикам относятся датчики, выходной сигнал которых имеет форму импульсов. Это следующие датчики:
- датчик скорости и положения коленчатого вала (поз. 3). Работа датчика основана на эффекте Холла. По частоте и фазе выходных импульсов ЭБУ определяет скорость вращения и положения коленвала в конкретной точке. Также при поступлении импульсов с датчика ЭБУ получает информацию о прокрутке двигателя. Если сигнала нет, то подачи бензина не происходит и двигатель не заведется. Тоже происходит, когда частота вращения коленатого вала превышает допустимую.
- датчик положения распределительного вала (поз. 1) определяет верхнюю мертвую точку в первом цилиндре на такте сжатия, и, получив сигнал с этого датчика ЭБУ определяет последовательность впрыска топлива.
- датчик скорости автомобиля представляет собой язычковое реле. Оно встроено в спидометр и на выходе имеет последовательность импульсов, частота которых пропорциональна скорости вращения привода прибора.
- датчик детонации (поз. 20) подсоединен к блоку цилиндров и отслеживает возникновение детонации в двигателе. Детонационные вибрации фиксируются чувствительным пьезоэлементом.
При возникновении детонации время опережения зажигания будет корректироваться системой, чтобы предотвратить детонацию.
- датчик кислорода – λ-зонд устанавливается в выпускной системе. Он выдает данные о концентрации кислорода в отработанных газах. В датчике используется сильная зависимость ЭДС твердотелого гальванического элемента из двуокиси циркония или титана от концентрации кислорода. Такая электрохимическая ячейка, реагируя на атомы кислорода, создает на полюсах разность потенциалов до 1 В. Это напряжение является управляющим. Оно поступает в ЭБУ, которое корректирует состав ДВС до тех пор, пока в отработанных газах не останется свободного, не вступившего в реакцию кислорода, т.е. добивается стехиометрического состава смеси.
Описание работы электронного блока управления
Так как сигналы, поступающие с датчиков, не годятся для непосредственной обработки в центральном процессоре, который понимает, как правило, только последовательность прямоугольных TTL импульсов, информация датчиков проходит дополнительную обработку. При этом сигналы аналоговых датчиков преобразуются в цифровой вид с помощью аналого-цифрового преобразователя (АЦП). Сигналы цифровых датчиков тоже нуждаются в обработке, поскольку форма и амплитуда сигнала, получаемая с них, тоже отличается от нужного вида. Поэтому информация от этих устройств проходит через систему обработки входных сигналов, где импульсы, генерируемые датчиками приводятся к виду TTL импульсов.
Сигнал с датчика детонации проходит отдельную обработку и поступает на специальный восьмиразрядный контроллер. После чего обработанный цифровой сигнал подается на центральный процессор, который получив эти данные, а также проанализировав показания датчиков положения коленатого вала, распредвала, определяет цилиндр в котором происходит детонация и производит изменения количества впрыска в конкретных форсунках или увеличивает угол опережения зажигания.
Структурная схема центральной ЭВМ стандартна для подобных устройств. Она состоит из:
- центрального процессора,
- оперативного запоминающего устройства (ОЗУ), в котором содержится информация, необходимая для текущей работы двигателя,
- постоянного запоминающего устройства (энергонезависимое ПЗУ). В нем содержится вся информация о параметрах автомобиля – тип двигателя, его параметры, установочный угол опережения зажигания, параметры системы питания, тип используемого топлива, нормальные показания датчиков, коды противоугонного устройства и многое другое.
Обрабатывая показания датчиков и сравнивая их значения с данными, хранящимися в ОЗУ и ПЗУ, процессор осуществляет необходимую коррекцию работы систем двигателя. Воздействовать непосредственно на исполнительные механизмы центральный контроллер не может, поскольку токи переключателей достаточно велики и могут вывести из строя микросхему, поэтому используется система обработки выходных сигналов. Она состоит из цифрово-аналогового преобразователя (ЦАП), предназначенного для перевода цифровых сигналов центральной ЭВМ в сигналы, пригодные для работы микросхем-драйверов. Эти микросхемы в соответствии с полученной информацией воздействуют на мощные электронные транзисторные ключи, которые и запускают исполнительные внешние устройства.
Для связи и синхронизации работы ЭБУ с внешними электронными устройствами – контроллерами автоматической коробки передач, автоблокировочной системы, климат контроля, устройств диагностики, используется особый протокол передачи данных, поддерживаемый специальным контроллером.
Питание ЭБУ производится от бортовой электрической сети. Напряжение 12 поступающее на вход преобразуется в стабилизированное напряжение 5 В внутренним источником питания. К исполнительным устройствам относятся:
- Схема зажигания, в которой замыкание и размыкание катушек зажигания происходит ключами ЭБУ в зависимости от сигналов, поступающих на них с центрального контроллера.
- Механизмы управления частотой вращения холостого хода (Механизм ISC) имеет две катушки, управляемые раздельно с помощью инверсных сигналов, поступающих с ЭБУ и обеспечивающих взаимодействие электромагнитных сил на катушках. Результатом такого взаимодействия будут различные углы поворота шагового электродвигателя. При наличии механизма управления частотой вращения холостого хода организуется перепускной шланг, подключенный параллельно дроссельной заслонке.
- Клапаны (соленоиды) инжекторов (поз. 18). Инжекторы впрыскивают топливо по сигналам, поступающим с ЭБУ. Количество топлива, впрыскиваемого инжектором, определяется временем, в течении которого подается напряжение на электромагнитный клапан. Меняя время открытия инжекторов, ЭБУ регулирует количество и качество смеси, добиваясь максимальной мощности работы двигателя во всех режимах.
- Для уменьшения количества вредных импульсов в современных автомобилях применяются различные экологические системы. Они воздействуют на двигатель путем дожигания паров бензина, рециркуляцией отработанных газов, подачей дополнительного воздуха. Подробно о них я расскажу в следующих статьях.
Во всех современных двигателях предусмотрено подключение диагностического сканера, работающего по протоколу OBD-2. Для этого в салоне автомобиля предусмотрен специальный диагностический разъем, к которому подключается сканер С его помощью можно произвести полную диагностику автомобиля, считать ошибки, просмотреть в графическом виде основные параметры.

Функционирование ЭБУ в различных режимах работы двигателя.
Работа ЭБУ будет описана для распределенной импульсной системы впрыска, применяемой в четырехцилиндровом двигателе. Она наиболее часто используется в современных автомобилях среднего класса. В этой системе количество топлива, подаваемое форсунками, регулируется импульсным сигналам на соленоиды инжекторов. ЭБУ отслеживает данные о состоянии двигателя, рассчитывает потребность в бензине и определяет необходимое время открытия форсунок. Для увеличения подачи топлива длительность импульса увеличивается, а для уменьшения сокращается.
Контроллер ЭБУ оценивает результаты своих действий с помощью датчиков, запоминает ошибки и вводит коррективы в свою работу. Самообучение процессора является непрерывным и действует в течении всего срока службы автомобиля.
Подача топлива происходит по разным методам:
- Синхронному, когда впрыск топлива происходит при определенном положении коленчатого вала.
- Асинхронному, т.е. без синхронизации с вращение коленчатого вала.
Наиболее часто применяется синхронный способ подачи топлива. Асинхронный используется в основном при пуске двигателя и режиме ускорения.
Форсунки включаются попарно и поочередно: сначала форсунки 14 цилиндров, а после поворота коленчатого вала на 180º форсунки 2 и 3 цилиндра. Таким образом каждая форсунка включается один раз за полный оборот коленчатого вала два раза за полный цикл работы двигателя.
Количество впрыснутого топлива определяет ЭБУ в зависимости от состояния двигателя и следующих режим работы:
1.Первоначальный впрыск топлива происходит, когда коленчатый вал начинает прокручивается стартером. При этом на ЭБУ происходит первых импульс от датчика вращения коленчатого вала. Получив этот сигнал, ЭБУ дает команду на включение сразу всех форсунок, чем ускоряется пуск двигателя. Такая команда следует каждый раз при пуске двигателя. Причем время открытия форсунок зависит от температуры: на холодном двигателя импульс длиннее, на горячем короче. После первоначального впрыска ЭБУ переходит в синхронный режим управления форсунками.
2.Пуск двигателя. При включении зажигания контроллер дает команду на включение реле бензонасоса для создания давления в магистрали подачи топлива к топливной рампе. Соотношение воздух/топливо при пуске ЭБУ определяет к зависимости от показания датчиков температуры охлаждающей жидкости и входящего воздуха. После начала вращения коленвала ЭБУ работает в пусковом режиме, пока скорость не превысит 400 об/мин, или не наступит режим продувки «залитого» двигателя.
3.Режим продувки двигателя. Если двигатель «залит» топливом (т.е. топливо намочило свечи зажигания), он может быть очищен путем полного открытия дроссельной заслонки при одновременном проворачивании коленчатого вала. При этом ЭБУ не подает импульсы впрыска на форсунки и свечи должны очиститься. Процессор поддерживает этот режим до тех пор, пока обороты коленчатого вала ниже 400 об/мин, и датчик положения дроссельной заслонки показывает, что она полностью открыта. Если Дроссельная заслонка удерживается почти полностью открытой при пуске двигателя, то он не запуститься, т. к. при полностью открытой дроссельной заслонке импульсы вспрыска на форсунку на подаются.
4.Рабочий режим управления топливоподачей. После пуска двигателя (обороты превышают 400 об/мин) ЭБУ переходит в рабочий режим. При этом контроллер рассчитывает длительность импульса на форсунки по сигналам датчика положения коленчатого вала, массового расхода воздуха, датчика температуры охлаждающей жидкости и положения дроссельной заслонки. При холодном двигателе (менее 50º С) система работает без обратной связи (датчик кислорода отключен). Это необходимо в связи с тем, что при прогреве двигателя требуется более богатая смесь и соотношение воздух/топливо будет отличаться от стехиометрического. Этот же режим включается при резком ускорении и в мощностном режиме.
5.Рабочий режим для систем вспрыска с обратной связью. В этом режиме на работу ЭБУ влияют показания датчика кислорода. От его показаний зависит длительность импульсов вспрыска. При этом если сигнал имеет низкое напряжение (обедненная смесь) или высокое напряжение (обогащенный состав смеси), то корректировка продолжается до достижения напряжения сигнала, соответствующему стехиометрическому составу смеси (режим постоянных переключений, свидетельствующих о работе датчика в нормальных условиях). Считается нормальным диапазоном регулировки топливоподачи по замкнутому контуру в пределах 20% коррекции топливной смеси. Значения выходящие за этот диапазон являются признаками неисправности компонентов системы. Если корректировка топливоподачи в режиме замкнутого контура вышла за пределы регулирования, то через какое-то время ЭБУ определит, что работа системы подачи топлива нарушилась и контроллер дает команду на включение лампы «проверь двигатель» и внесет в память соответствующий код ошибки, например, «обогащенная смесь». При этом система программно переключается в режим разомкнутого контура. В этом случае коррекцию топливной смеси ЭБУ осуществляет в соответствии показания датчиков расхода воздуха и частоты вращения коленвала, пользуясь с заложенными в ОЗУ ЭБУ данными.
6.Режим обогащения при ускорении. ЭБУ контролирует не только положение дроссельной заслонки, но и скорость ее перемещения. При резком изменении показания датчика процессор выдает команду о переходе в кратковременный режим резкого обогащения смеси. При этом длительность импульсов на форсунках увеличивается, что обеспечивает автомобилю быстрое ускорение. Датчик кислорода при этом отключается.
7.Режим мощностного обогащения. Для достижения максимальной мощности требуется обогащенная горючая смесь, и ЭБУ изменяет соотношение воздух/топливо приблизительно 12/1. Система в этом случае работает в режиме разомкнутого контура.
8.Режим обеднения при торможении. При торможении автомобиля с закрытой дроссельной заслонкой может увеличиться выброс в атмосферу токсичных веществ. Для предотвращения этого ЭБУ уменьшает подачу топлива в уменьшении угла открытия дроссельной заслонки и количества расхода воздуха.
9.Режим отключения подачи топлива при торможении двигателем. При торможении двигателем, т.е. при движении со включенной передачей и закрытой дроссельной заслонкой, ЭБУ может на короткое время полностью отключать импульсы впрыска. Условиями отключения импульсов вспрыска при торможении являются:
- Закрытая дроссельная заслонка.
- Скорость автомобиля выше 30 км/ч.
- Частота вращения коленчатого вала выше 1800 об/мин.
- Температура охлаждающей жидкости не ниже 20ºC.
ЭБУ отменяет режим отключения подачи топлива при торможении, если изменились следующие параметры.
- Дроссельная заслонка открылась на 2% и более.
- Скорость автомобиля ниже 30 км/час.
- Частота вращения коленчатого вала ниже 1800 об/мин.
- Выключение сцепление (резкое падение частоты вращения коленчатого вала).
10.Компенсация падение напряжения питания в бортовой сети. При падении напряжения схема зажигания может давать слабую искру, а время срабатывания клапанов форсунки увеличивается. ЭБУ компенсирует это увеличением длительности открытия форсунок и времени замкнутого состояния первичных обмоток катушек зажигания.
11.Режим аварийного отключения подачи топлива. При включенном зажигании топливо форсункой не подается, во избежание самовоспламенении смеси при перегретом двигателе. Кроме того импульсы вспрыска не подаются, если ЭБУ не получает сигналов с датчика положения коленчатого вала, что воспринимается как остановка ДВС. Отключение питания также происходит при превышении предельно допустимой частоты вращения коленчатого вала двигателя, равной примерно 6500 об/мин, для защиты двигателя от перегрузки.
12.Управление электровентилятором системы охлаждения. Электровентилятор включается и выключается ЭБУ в зависимости от температуры двигателя, частоты вращения коленчатого вала, работы кондиционера и других факторов. Электровентилятор включается с помощью вспомогательного реле в том случае, если температура охлаждающей жидкости превысит 101ºC или будет дан запрос на включение кондиционера. Выключение происходит после падения температуры охлаждающей жидкости ниже 97ºC, отключения кондиционера, или выключения двигателя. (Температура включения и выключения вентилятора зависит от программы в ЭБУ двигателя.)
13.Обнаружение и регистрация неисправностей. ЭБУ постоянно выполняет самодиагностику по некоторым функциям управления. При обнаружении неисправности ЭБУ заносит код ошибки в память, и включатся контрольная лампочка «CHECK ENGINE». О том, как правильно диагностировать неисправности в этих системах будет подробно рассказано в следующих статьях.
Как провести диагностику двигателя автомобиля своими силами? Читайте в следующем материале:
Читайте также: