
Как включается полный привод на субару
Механические коробки нас, по традиции, интересуют мало. Тем более с ними все довольно прозрачно - со второй половины 90-х все субару на механике имеют честный полный привод с тремя дифференциалами (межосевой блокируется закрытой вискомуфтой). Из отрицательных сторон стоит упомянуть слишком усложненную конструкцию, полученную совмещением продольно установленного двигателя и исходно-переднего привода. А также отказ субаровцев от дальнейшего массового использования такой несомненно полезной вещи, как понижающая передача. На единичных "спортивных" версиях Impreza STi встречается и продвинутая МКПП с "электронноуправляемым" межосевым дифференциалом (DCCD), где водитель может на ходу изменять степень его блокировки.
Но не будем отвлекаться. В автоматических трансмиссиях ныне эксплуатируемых Subaru используется два основных типа 4WD.
Постоянный передний привод, без межосевого дифференциала, подключение задних колес гидромеханической муфтой с электронным управлением
Э тот вариант издавна устанавливается на подавляющее большинство Subaru (с АКПП типа TZ1) и широко известен еще по Legacy образца 89 года. По сути, этот полный привод такой же "честный", как и свежий тойотовский Active Torque Control - те же самые подключаемые задние колеса и тот же самый принцип TOD (Torque on Demand). Межосевого дифференциала нет, а задний привод включается гидромеханической муфтой (пакет фрикционов) в раздаточной коробке.
Субаровская схема имеет некоторые преимущества в рабочем алгоритме перед другими типами подключаемого 4WD (особенно простейшими, вроде примитивного V-Flex). Пусть и небольшой, но момент при работе A-AWD передается назад постоянно (если только система не отключена принудительно), а не только при пробуксовке передних колес - это полезнее и эффективнее. Благодаря гидромеханике перераспределять усилие можно немного точнее, нежели в электромеханическом ATC. Кроме того, A-AWD конструктивно долговечнее. У машин с вискомуфтой подключения задних колес существует опасность резкого самопроизвольного "появления" заднего привода в повороте с последующим неуправляемым "полетом", но у A-AWD такая вероятность хоть и не исключена полностью, но значительно снижена. Однако с возрастом, по мере износа, предсказуемость и плавность подключения задних колес существенно уменьшается.
Алгоритм работы системы сохраняется прежним в течение всего времени выпуска, лишь немного корректируясь.
1) В нормальных условиях, при полностью отпущенной педали акселератора распределение момента между передними и задними колесами составляет 95/5..90/10.
2) По мере нажатия на газ, подводимое к пакету фрикционов давление начинает увеличиваться, диски постепенно поджимаются и распределение момента начинает смещаться в сторону 80/20. 70/30. и т.д. Зависимость между газом и давлением в магистрали отнюдь не линейная, а выглядит скорее как парабола - чтобы значительное перераспределение происходило только при сильном нажатии педали. При полностью утопленной педали фрикционы поджимаются максимальным усилием и распределение доходит до 60/40. 55/45. Буквально "50/50" в данной схеме не достигается - это не жесткая блокировка.
3) Кроме того, установленные на коробке датчики частоты вращения переднего и заднего выходных валов позволяют определить пробуксовку передних колес, после чего максимальная часть момента отбирается назад независимо от степени дачи газа (кроме случая полностью отпущенного акселератора). Эта функция действует на малых скоростях, примерно до 60 км/ч.
4) При принудительном включении 1-й передачи (селектором), фрикционы сразу поджимаются максимально возможным давлением - таким образом как бы определяются "сложные вседорожные условия" и привод сохраняется самым "постоянно полным".
5) При воткнутом в разъем предохранителе "FWD" повышенное давление к муфте не подводится и привод постоянно осуществляется только на передние колеса (распределение "100/0").
6) По мере развития автомобильной электроники пробуксовки стало удобнее контролировать по штатным датчикам ABS и уменьшать степень блокировки муфты при прохождении поворотов или срабатывании ABS.
Следует обратить внимание, что все паспортные распределения моментов даются только в статике - при ускорениях/замедлениях развесовка по осям меняется, поэтому реальные моменты на осях получаются другими (иногда "очень другими"), точно также как и при разном коэффициенте сцепления колес с дорогой.
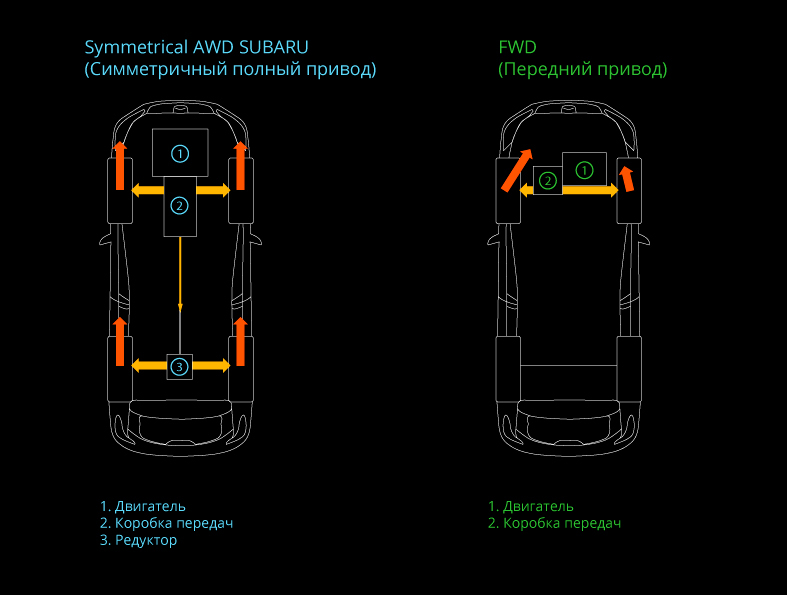
В настоящее время на обычных автомобилях используются три типа привода: привод на передние колеса (FWD), привод на задние колеса (RWD) и привод на все колеса (4WD).
Уже в начале своей истории компания Subaru сделала ставку на полный привод, который в те времена применяли только для специальных автомобилей. В этой главе мы расскажем о преимуществах фирменной системы полного привода Subaru. Для лучшего понимания рассмотрим влияние каждого типа привода на динамические качества автомобиля. Поскольку эти качества во многом зависят от свойств шин, отвечающих за связь между автомобилем и поверхностью дороги, вначале следует ознакомиться с характеристиками шин.
Помимо обеспечения ездового комфорта при движении за счет поглощения толчков от неровностей дороги шины выполняют еще три важные функции:
- Передача крутящего момента двигателя на поверхность дороги для движения автомобиля вперед (ускорение).
- замедление автомобиля вплоть до полной остановки (торможение).
- изменение направления движения автомобиля (управление).
- Центробежная сила
- Боковая реакция шины
- Максимальная сила сцепления
- Сила тяги
- Заданная траектория
Поскольку тяговое и тормозное усилия не могут возникнуть одновременно, на приведенной справа иллюстрации сила, действующая на шину, представлена двумя составляющими. Это две элементарные силы, величина которых ограничена общими свойствами шины, что означает отсутствие возможности управления, если шина исчерпала запас свойств для ускорения.
Представим себе автомобиль, движущийся по дуге. В этой ситуации на все четыре шины действует боковая сила, уравновешивающая центробежную силу, которая возникает в процессе поворота автомобиля. И хотя управляемыми являются только передние колеса, на все четыре колеса автомобиля действуют силы, стремящиеся вытолкнуть его наружу, за пределы траектории поворота. Если скорость автомобиля продолжает увеличиваться, сила, действующая на шины и обеспечивающая заданную траекторию движения, достигнет своего предела, после чего автомобиль отклонится от заданной траектории. В таком случае, если одна из шин нагружена положительным или отрицательным (тормозным) крутящим моментом, она достигнет своего предела по сцеплению раньше остальных шин. В зависимости от типа привода (FWD/RWD/4WD) такое явление может так или иначе влиять на поведение автомобиля. *
Характеристики шин в большой степени зависят от их материала и конструкции, а также от состояния дороги. Кроме того, на них влияет приложенная вертикальная нагрузка (чем больше нагрузка на шину, тем большую силу в контакте с дорогой она может реализовать). Шина способна поддерживать заданную траекторию только во время вращения. Если колесо полностью заблокировано, автомобиль становится неуправляемым.
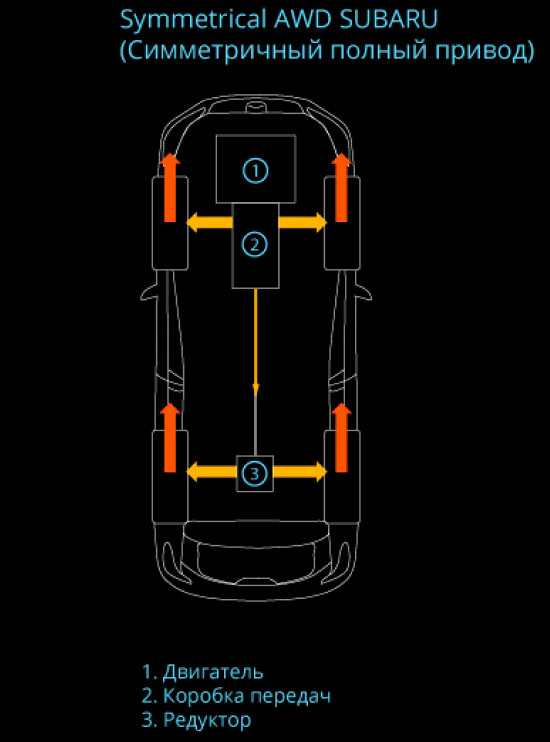
Постоянный полный привод Subaru – Symmetrical AWD
- Высокая устойчивость: крутящий момент распределяется на все четыре колеса, благодаря чему безопасное поведение сохраняется даже на неоднородном покрытии.
- Высокая проходимость: прекрасные тяговые возможности в любых условиях обеспечиваются подачей крутящего момента на все четыре колеса.
- Легкость в управлении: склонность к недостаточной или избыточной поворачиваемости преодолена даже в предельных режимах.
- Хорошая динамика разгона: крутящий момент подводится ко всем четырем колесам, благодаря чему эта схема отлично сочетается с двигателями большой мощности.
- Большая масса, повышенный расход топлива. Компоненты полного привода могут быть простыми и легкими благодаря продольному расположению двигателя и коробки передач.
- Посредственная управляемость. Благодаря конструктивным преимуществам полный привод не мешает моделям Subaru демонстрировать отточенную управляемость.

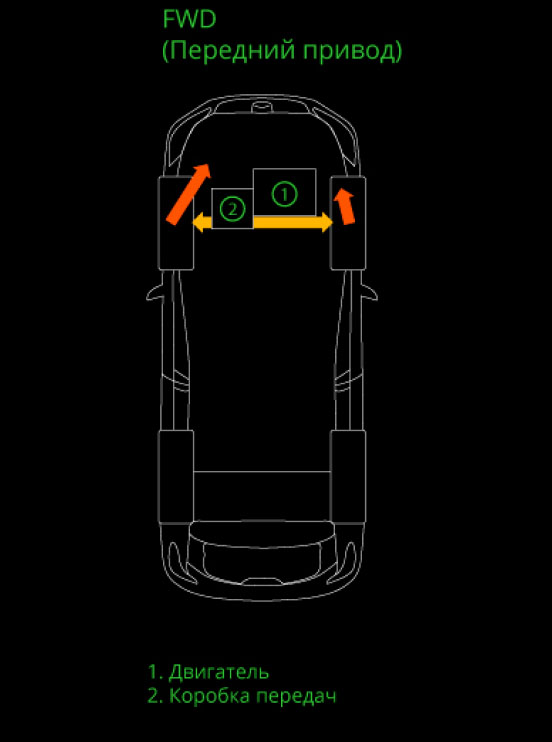
Передний привод FWD
- Возможность получить более просторный салон, поскольку под днищем нет карданного вала. (Но необходимо обеспечить достаточную жесткость кузова, поэтому у многих переднеприводных моделей имеется напольный тоннель).
- Высокая курсовая устойчивость: поскольку передние колеса тянут автомобиль, постоянно действующие силы тяги передних колес повышают его устойчивость при движении с большими скоростями.
- Легкость в управлении: переднеприводный автомобиль в предельных режимах проявляет склонность к недостаточной поворачиваемости. При отпускании педали акселератора и уменьшении силы тяги происходит восстановление чувствительности к управлению с возвращением на заданную траекторию.
- Прекрасная топливная экономичность: переднеприводная схема обеспечивает короткий путь передачи крутящего момента и высокую эффективность работы.
- Хуже реакция на управление: поскольку и тяга, и управление автомобилем осуществляются только передними колесами, в предельных режимах движения проявляется менее четкая реакция на управление и склонность к недостаточной поворачиваемости.
- При интенсивном разгоне автомобиля с мощным двигателем нагрузка перераспределяется на задние колеса, из-за чего передние шины не могут полностью реализовать свои возможности. Привод на передние колеса не оправдывает себя на автомобилях с мощным двигателем.


Недостаточная поворачиваемость
- Центробежная сила
- Боковая реакция шины
- Максимальная сила сцепления
- Сила тяги
- Заданная траектория
Задний привод RWD
- Острая управляемость: передние колеса выполняют только функцию управления. Переднее расположение двигателя и задний привод обеспечивают автомобилю хорошее распределение массы по колесам.
- Меньший радиус разворота: отсутствие привода передних колес позволяет увеличить угол их поворота.
- Хороший разгон на сухих дорогах: при разгоне масса перераспределяется на задние колеса, способствуя реализации ими большей силы тяги.
- Меньше вместимость пассажирского салона и багажника: громоздкий привод задних колес (карданный вал, главная передача) размещается под днищем кузова.
- Больше снаряженная масса: у автомобилей с приводом на задние колеса больше узлов и агрегатов по сравнению с переднеприводными автомобилями.
- В предельных режимах эти автомобили проявляют склонность к избыточной управляемости, что делает их сложнее переднеприводных в управлении.


Избыточная поворачиваемость
- Центробежная сила
- Боковая реакция шины
- Максимальная сила сцепления
- Сила тяги
- Заданная траектория
Полный привод 4WD
- Высокая устойчивость: крутящий момент подается на все четыре колеса, благодаря чему безопасное поведение сохраняется даже на неоднородном покрытии.
- Высокая проходимость: возможности реализации тяги гораздо шире, чем при моноприводной схеме.
- Легкость в управлении: поворачиваемость полноприводных автомобилей ближе к нейтральной.
- Хорошая динамика разгона: крутящий момент подводится ко всем четырем колесам, поэтому полный привод очень хорошо сочетается с двигателями большой мощности.
- Меньше вместимость пассажирского салона и багажника: громоздкий привод передних и задних колес (карданный вал, главная передача размещены под днищем кузова).
- Большая снаряженная масса вследствие большего количества деталей, узлов и агрегатов.
- Повышенный расход топлива, связанный с большей массой и наличием дополнительных вращающихся деталей.
- Хуже реакция на управление вследствие циркуляции мощности, а также из-за того, что управляемые колеса нагружены крутящим моментом как ведущие.


Поворачиваемость, близкая к нейтральной
- Центробежная сила
- Боковая реакция шины
- Максимальная сила сцепления
- Сила тяги
- Заданная траектория
Безопасность
Переднеприводные автомобили с полуосями неодинаковой длины из-за поперечного расположения двигателя имеют склонность к уводу с прямолинейной траектории движения при интенсивном разгоне. Увод происходит в сторону полуоси большей длины. Происходит это из-за того, что при передаче крутящего момента через шарниры равных угловых скоростей (ШРУС) происходит разделение крутящего момента на две составляющие: одна – по вращению колеса – создает силу тяги, другая – стремится повернуть колесо в сторону (при разгоне – внутрь). Поскольку шарнир короткой полуоси (левой на а/м с левым рулем) работает с большими углами перекоса, чем шарнир длинной полуоси (правой), левое колесо стремится повернуться направо с большей силой, чем правое налево, в итоге автомобиль тянет вправо.
При резком разгоне на низких передачах передняя часть автомобиля может приподняться, еще больше увеличивая разность углов наклона полуосей. Чем интенсивнее разгон – тем сильнее автомобиль тянет вправо. При торможении двигателем – эффект обратный, но он незаметен, т.к. и разность углов наклона полуосей, и момент на полуосях в этом случае меньше.
Основное отличие симметричного привода Subaru – одинаковая длина правой и левой полуосей, что позволяет избежать увод автомобиля с прямолинейной траектории движения и обеспечить достаточные ходы подвески с четким отслеживанием профиля дороги. В результате автомобиль надежно «держит» дорогу, колеса словно липнут к поверхности.
Удовольствие от вождения
Как правило, полноприводные автомобили отличаются большей массой и худшей управляемостью, что в итоге приводит к повышенному расходу топлива. Симметричный полный привод благодаря своим конструктивным преимуществам не требует лишних компонентов. У некоторых моделей Subaru расход топлива сопоставим с показателями моноприводных моделей того же класса других изготовителей.
Благодаря продольно установленному оппозитному двигателю и симметричному приводу автомобили Subaru обладают отточенной управляемостью. Они наделены проходимостью полноприводных моделей, а по быстроте реакций превосходят обычные моноприводные модели.
Устойчивость и тяговое усилие
Эффективность полного привода зависит от концепции автомобиля. Чем активнее происходит распределение крутящего момента по колесам, тем выше проходимость, правда, чаще всего в ущерб управляемости.
У моделей Subaru при быстроте реакции и высокой эффективности полного привода крутящий момент может активно распределяться по колесам, сохраняя хорошую устойчивость и высокую проходимость на разных типах дорог без ущерба для топливной экономичности и управляемости.
Нетрудно понять разницу между полноприводными автомобилями на базе моноприводных моделей и автомобилями Subaru с их идеальной компоновкой, созданной с нуля.
Полноприводный автомобиль со свободным межосевым дифференциалом при пробуксовке одного из колес останавливается. Чтобы избежать этого, применяют механизм блокировки.
Однако работа такого механизма может негативно сказываться на управлении автомобилем. Так, при движении по сухому асфальту с заблокированным дифференциалом возникает циркуляция мощности, вызывающая рывки и затрудняющая выполнение поворота. Поэтому на сухой дороге дифференциал нужно разблокировать, а на сложных участках с низким сцеплением – заблокировать. Система постоянного полного привода может автоматически блокировать и разблокировать дифференциал в зависимости от условий движения.
Такое решение необходимо для предотвращения рывков при включении блокировки. Кроме того, более совершенное управление требуется в условиях резкого изменения дорожных условий. Вот когда опыт и технические знания в области управления системой полного привода действительно имеют значение!
- Потенциальная сила тяги, передаваемая колесом
- Сила тяги, расходуемая на внутренние потери
- Фактическая сила тяги, передаваемая колесом
Управляемость
Многоступенчатый режим ручного и три автоматических режима управления системы DCCD предоставляют возможность выбора одного из двух типов блокировки межосевого дифференциала. Это обеспечивает идеальный баланс великолепных показателей сцепления с дорогой и маневренности на любых дорожных покрытиях. Базовая пропорция распределения крутящего момента между передними и задними колесами — 41% / 59%. Перераспределение крутящего момента обеспечивается за счет управления многодисковой электромагнитной муфтой передачи крутящего момента и механического самоблокирующегося дифференциала.
Система динамической стабилизации VDC
Система активного управления вектором тяги ATV

Функция автоматического удержания автомобиля AVH
Функция автоматического удержания автомобиля обеспечивает неподвижность автомобиля даже после снятия стопы водителя с педали тормоза при остановке автомобиля.
Это означает, что водителю больше не требуется удерживать педаль тормоза в нажатом положении в таких ситуациях как заторы (пробки), ожидание смены сигнала светофора или при остановке на склоне.
Когда функция автоматического удержания автомобиля находится в режиме готовности, нажатие педали тормоза для остановки автомобиля инициирует включение системы динамической стабилизации. Это поддерживает давление тормозной жидкости в контуре, удерживая автомобиль на месте. Таким образом автомобиль остается неподвижным даже после отпускания педали тормоза.
Для прекращения удержания автомобиля необходимо выполнить одно из действий: выжать педаль акселератора, повторно выжать педаль тормоза, перевести рычаг селектора в положение «P» при выжатой педали тормоза.
Электрический стояночный тормоз включается автоматически, если:
- машина не двигается около 10 минут при включенном AVH,
- не пристегнут ремень безопасности сидения водителя,
- при регистрации ошибки в этой системе.
При выполнении поворотов или маневров при объезде внезапных препятствий система динамической стабилизации сравнивает намерения водителя с фактическим поведением автомобиля. Это сравнение осуществляется на основе сигналов датчика угла поворота рулевого колеса, датчика нажатия педали тормоза, а также датчика бокового ускорения и угловой скорости рыскания.
После этого система обеспечивает корректировку выходной мощности двигателя и режимов работы тормоза каждого колеса, необходимую для удержания автомобиля на заданной траектории.
Системы симметричного полного привода Subaru
Система полного привода VTD *1 :
Спортивная версия полного привода с электронным управлением, улучшающая характеристики поворачиваемости. Компактная система полного привода включает в себя межосевой планетарный дифференциал и многодисковую гидравлическую муфту блокировки *2 с электронным управлением. Распределение крутящего момента между передними и задними колесами в соотношении 45:55 непрерывно корректируется блокировкой дифференциала с помощью многодисковой муфты. Распределение крутящего момента контролируется автоматически, с учетом состояния дорожного покрытия. Это обеспечивает великолепную устойчивость, а за счет распределения крутящего момента с акцентом на задние колеса улучшаются характеристики поворачиваемости.
Система полного привода с активным распределением крутящего момента (ACT):
Актуальные модели (российская спецификация)
На российском рынке Subaru Outback, Subaru Forester * , Subaru XV.
* Для модификаций c трансмиссией Lineartronic.
Система полного привода с межосевым самоблокирующимся дифференциалом с вискомуфтой (CDG):
Механическая система полного привода для механических трансмиссий. Система представляет собой сочетание межосевого дифференциала с коническими шестернями и блокировки на основе вискомуфты. В обычных условиях крутящий момент между передними и задними колесами распределяется в соотношении 50:50. Система обеспечивает безопасное спортивное вождение, всегда максимально используя доступную тягу.
Актуальные модели (российская спецификация)
Subaru WRX и Subaru Forester - с механической трансмиссией.
Система полного привода с электронноуправляемым активным межосевым дифференциалом повышенного трения (DCCD *3 ):
Система полного привода, ориентированная на обеспечение максимальных ходовых характеристик, для серьезных спортивных состязаний. Система полного привода с электронноуправляемым активным межосевым дифференциалом повышенного трения использует сочетание механической и электронной блокировок дифференциала при изменении крутящего момента. Крутящий момент между передними и задними колесами распределяется в соотношении 41:59, с акцентом на максимальные ходовые характеристики и оптимальное управление динамической стабилизацией автомобиля. Механическая блокировка отличается более быстрым откликом и срабатывает до электронной. Работая с большим крутящим моментом, система демонстрирует наилучший баланс между остротой управления и устойчивостью. Имеются предустановленные режимы управления блокировкой дифференциала, а также режим ручного управления, которыми водитель может пользоваться в соответствии с дорожной ситуацией.
Актуальные модели (российская спецификация)
Subaru WRX STI с механической трансмиссией.
Мы уже рассказывали о том, что под брендом Quattro могут скрываться принципиально разные схемы полного привода . Вот и "плеяды" туда же! Несмотря на общее фирменное обозначение Symmetrical AWD, на автомобилях марки Subaru в зависимости от модели, года выпуска и рынка сбыта применяются совершенно разные полноприводные трансмиссии. Какие именно? Будем разбираться!
Немного истории
В вопросе производства массовых полноприводных легковушек Subaru опередила Audi на доброе десятилетие: предварительно "обкатав" технологию на компактной модели FF-1 1300, в 1972-м компания предложила покупателям полноприводный универсал Leone Station Wagon. Постепенно приставка AWD появилась на большинстве моделей Subaru 1970-1980-х, хотя вплоть до конца 1990-х даже крупные модели (Impreza, Legacy) могли иметь привод лишь на передние колеса.
Но что представлял собой AWD на Leone 1980-х? Задняя ось подключалась прямо на ходу (Shift on the Fly), причем на машинах с механической коробкой водитель это делал принудительно, а у автоматических трансмиссий процессом заведовала электроника, подключавшая многодисковую муфту.
В крошечном однообъемнике Libero/Domingo полный привод также появлялся по велению водителя, нажимавшего на кнопку. Но при этом подключалась передняя ось, так как основной привод был на задние колеса, постоянно загруженные мотором (да-да, такая вот любопытная компоновка!). Причем подключением заведовала вакуумная система.
К слову, позже Libero получил обычную вискомуфту. Таким же образом полный привод обрел и Justy второго поколения (по сути, "клон" Suzuki Swift II): нехитрый узел обеспечивал передачу тяги к задним колесам при пробуксовке передних.
То есть независимо от варианта конструкции полный привод у Subaru вовсе не был постоянным, и так продолжалось вплоть до конца 1980-х. А затем появились новые модели - и новые трансмиссии.
Действительно постоянный
"Классика" полного привода на Subaru 1990-2000-х (Impreza, Legacy, Forester) - система CDG с симметричным межосевым дифференциалом, блокирующимся при помощи вискомуфты, что позволяет перебрасывать на ось, имеющую лучшее сцепление с дорогой, до 80% тяги. Считайте, чистая механика, дополненная гидравликой, без какого-либо электронного управления. Но данный тип трансмиссии применялся лишь на автомобилях с механической коробкой передач.
При этом до недавнего времени некоторые универсалы (в частности, для европейского рынка с "атмосферными" моторами) имели еще и понижающую передачу. Правда, следует учитывать, что относительно небольшое соотношение (1:1,45) было предназначено не столько для покорения бездорожья, сколько для того, чтобы не спалить сцепление при маневрировании под нагрузкой (например, с прицепом) на слабонесущем покрытии. Также на некоторые модели (в частности, на отдельные модификации Forester) устанавливают задний межколесный дифференциал, блокируемый при помощи вискомуфты.
Но "заряженные" WRX STi оснащаются несимметричным дифференциалом, который обеспечивает перераспределение крутящего момента в пользу задних колес. Соотношение зависит от поколения "стихи", но находится на уровне 41:59 - 35:65. При этом "центр" имеет изменяемую (принудительно или автоматически) степень блокировки при помощи электромагнитной муфты. Данная система известна под названием DCCD (Driver Controlled Center Differential). На задней оси, кроме того, установлен "самоблок".
Последнее поколение WRX STi получило систему управления вектором тяги torque vectoring: в поворотах по команде блока управления внутреннее колесо подтормаживается, позволяя "вкручивать" автомобиль в вираж. Однако система работает только в связке с VDC и при ее отключении также дезактивируется.
Считается, что "честный" постоянный полный привод имеют лишь Subaru с механической коробкой передач, но это не так. Ведь для "заряженных" версий Subaru с автоматической трансмиссией (та же Impreza WRX STi, а также Forester S-Edition и Legacy GT) в свое время была предложена схема, получившая название Variable torque distribution AWD (VTD). В ней используется несимметричный планетарный дифференциал (45:55 в пользу задних колес), блокируемый с помощью электронно-управляемой многодисковой муфты. В качестве опции в заднем межколесном дифференциале также может быть установлена вискомуфта.
И все же большая часть моделей Subaru с автоматическими трансмиссиями и вариаторами Lineatronic оснащалась и оснащается системой полного привода с активным распределением крутящего момента Active torque split AWD (ACT). В зависимости от поколения и года выпуска имеются определенные конструктивные отличия, но принцип действия ACT остается неизменным.
В отличие от всех вышеназванных схем межосевого дифференциала здесь нет, за передачу крутящего момента к задним колесам отвечает электронно-управляемая муфта. Ну а главное - такие Subaru имеют более "переднеприводный" характер на скользких покрытиях, поскольку соотношение в нормальных условиях здесь 60:40 в пользу передних колес!
При этом перераспределение тяги зависит от целого ряда параметров (выбранный режим коробки, скорость вращения передних и задних колес, положение педали "газа" и т.д.), на основании которых блок управления "решает", насколько жестко зажать фрикционы и сколько момента перебросить на заднюю ось. Поэтому соотношение меняется в режиме реального времени и может варьироваться от 90:10 до 60:40 в пользу передней оси. Кстати, задний межколесный дифференциал на ряде моделей также может быть оснащен вискомуфтой в качестве автоматической блокировки.
Сказать, что Subaru с ACT имеют "ненастоящий" полный привод, нельзя: в отличие от многих моделей других марок с подключаемой задней осью здесь тяга к задним колесам поступает всегда. Но до "равноправного" соотношения 50:50 дело все же не доходит, в целом на скользких покрытиях такие автомобили управляются несколько иначе, нежели версии с механическим дифференциалом. Впрочем, все эти особенности раскрываются в далеко не стандартных режимах движения, а в "гражданских" даже опытный водитель вряд ли определит, какая из вариаций Symmetrical AWD использована.
С точки зрения эксплуатации
"Механика" вполне надежна, однако со временем начинают шуметь подшипники валов. Ресурс сцепления средний, но значительно снижается при буксировке прицепов и внедорожных вылазках. Чтобы уберечь детали межосевого дифференциала и вискомуфты от износа и повреждений (а у машин начала 2000-х там могла быть "слабина"), размерность шин на передней и задней осях не должна различаться. Еще одна проблема, также связанная с режимом эксплуатации, - выход из строя полуосей. Редко, но у особо "настойчивых" владельцев это случается.
В автоматических трансмиссиях крутящий момент на заднюю ось передается через пакет фрикционов, который срабатывает при поступлении масла, - за это отвечает соленоид. Если он зависает в открытом положении, это приводит к постоянному срабатыванию полного привода и, как следствие, повышенной нагрузке на передний дифференциал, а там и до поломки последнего недалеко. На старых машинах проблема решалась заменой соленоида, на современных, возможно, придется менять гидроблок, что обойдется на порядок дороже.
Постоянный полный привод с межосевым дифференциалом - за малым исключением удел машин с механической коробкой передач, что для нынешнего модельного ряда Subaru, считайте, исключение из правил. Современные "плеяды", как правило, оснащены вариатором Lineatronic и "автоматическим" полным приводом ACT.
Но стоит ли об этом сожалеть? За счет конструктивных особенностей (в частности, вместо ремня используется цепь, вместо пакета сцеплений - гидротрансформатор, как на классических АКП) на фоне других СVT-трансмиссий Lineatronic выглядит весьма достойно с точки зрения стойкости к нагрузкам. Да и трансмиссия АСТ, дополненная электронными "помощниками", оказывается весьма эффективной в большинстве дорожных ситуаций, а разница с "дифференциальным" полным приводом CDG хотя и есть, но для большинства владельцев вовсе не критична, если они вообще ее замечают.
Радует, что независимо от конструкции полный привод у Subaru достаточно надежен и вынослив, хотя не лишен уязвимых мест. По поводу их природы можно спорить, конструкторское это упущение или же следствие тех высоких нагрузок, которые "плеяды" традиционно получают от своих преданных владельцев, но факт остается фактом: "трансмиссионные" проблемы хоть и редко, но случаются. Однако, как правило, уже на хорошо поездивших машинах, а к тому моменту бюджетные решения уже имеются.

Хорошо, что автор вопроса указал соотношение (60/40), хотя было бы лучше, если бы он уточнил еще и модель, а также годы ее выпуска. Ведь, несмотря на общее фирменное обозначение Symmetrical AWD, на автомобилях марки Subaru в зависимости от модели, года выпуска и рынка сбыта применяются совершенно разные полноприводные трансмиссии!

Дабы не запутывать читателей и не перегружать ответ перечислением и описанием всех возможных вариаций, кратко пробежимся по принципиальным схемам полного привода, применяемым на современных Subaru, и чуть подробнее остановимся на той, которая, как нам кажется, интересует автора вопроса.


Версии с механической коробкой передач имеют "честный" постоянный полный привод. Как правило, это схема CDG с симметричным межосевым дифференциалом, блокирующимся при помощи вискомуфты. Считайте, чистая механика, дополненная гидравликой, без какого-либо электронного управления. На некоторые модели, в частности Forester, также устанавливают задний межколесный дифференциал, блокируемый при помощи вискомуфты. Кроме того, на ряде моделей используется понижающая передача.

Но "заряженные" WRX STi оснащаются несимметричным дифференциалом, который обеспечивает перераспределение крутящего момента в пользу задних колес. Соотношение зависит от поколения "стихи", но находится на уровне 41:59 – 35:65. При этом "центр" имеет изменяемую (принудительно или автоматически) степень блокировки при помощи электромагнитной муфты. Данная система известна под названием Driver Controlled Center Differential (DCCD). На задней оси, кроме того, установлен "самоблок".

Для "заряженных" версий Subaru с автоматической трансмиссией (та же Impreza WRX STi, а также Forester S-Edition и Legacy GT) в свое время была предложена схема, получившая название Variable torque distribution AWD (VTD). В ней используется несимметричный планетарный дифференциал (45:55 в пользу задних колес), блокируемый с помощью электронно-управляемой многодисковой муфты. В качестве опции в заднем межколесном дифференциале также может быть установлена вискомуфта.

Наконец, Subaru с автоматическими трансмиссиями и вариаторами Lineatronic оснащаются системой полного привода с активным распределением крутящего момента Active torque split AWD (ACT). Судя по всему, именно про нее и спрашивает наш читатель. В зависимости от поколения и года выпуска имеются определенные конструктивные отличия, но принцип действия ACT остается неизменным.
В отличие от вышеназванных схем межосевого дифференциала здесь нет, за передачу крутящего момента к задним колесам отвечает электронно-управляемая муфта. Ну а главное - такие Subaru имеют более "переднеприводный" характер на скольких покрытиях, поскольку соотношение в нормальных условиях здесь 60:40 в пользу передних колес!

При этом перераспределение тяги зависит от целого ряда параметров (выбранный режим коробки, скорость вращения передних и задних колес, положение педали "газа" и т.д.), на основании которых блок управления и "решает", насколько жестко зажать фрикционы и сколько момента перебросить на заднюю ось. Поэтому соотношение меняется в режиме реального времени и может варьироваться в пределах 90:10 – 60:40 в пользу передней оси. Кстати, задний межколесный дифференциал на ряде моделей также может быть оснащен вискомуфтой в качестве автоматической блокировки.

Сказать, что Subaru с ACT имеют "ненастоящий" полный привод нельзя: в отличие от многих моделей других марок с подключаемой задней осью здесь тяга к задним колесам поступает всегда. Но до "равноправного" соотношения 50:50 дело все же не доходит, в целом на скользких покрытиях такие автомобили управляются несколько иначе, нежели версии с механическим дифференциалом. Впрочем, все эти особенности раскрываются в далеко не стандартных режимах движения, а в "гражданских" даже опытный водитель вряд ли определит, какая из вариаций Symmetrical AWD использована.
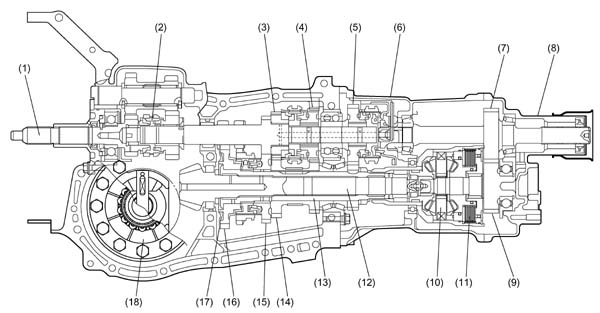
Со второй половины 90-х все автомобили Subaru на механике имеют честный полный привод с тремя дифференциалами (Дифференциал межосевой блокируется закрытой вискомуфтой).
Из отрицательных сторон стоит упомянуть слишком усложненную конструкцию, полученную совмещением продольно установленного двигателя и исходно-переднего привода. А также отказ FHI от дальнейшего массового использования такой, несомненно, полезной вещи, как понижающая передача. На единичных спортивных версиях Impreza WRX STi встречается и продвинутая МКПП с электронноуправляемым межосевым дифференциалом (DCCD), где водитель может на ходу изменять степень его блокировки.
- 1 - входной вал,
- 2 - механизм понижающей передачи,
- 3 - ведущая шестерня 3-й передачи,
- 4- ведущая шестерня 4-й передачи,
- 5 - ведущая шестерня 5-й передачи,
- 6 - корпус раздаточной коробки,
- 7 - ведомая шестерня раздаточной коробки,
- 8 - хвостовик,
- 9 - ведущая шестерня раздаточной коробки,
- 10 - межосевой дифференциал,
- 11 - вязкостная муфта,
- 12 - передний выходной вал,
- 13 - вторичный вал коробки передач,
- 14 - ведомая шестерня 3-й передачи,
- 15 - ведомая шестерня 2-й передачи,
- 16 - ведомая шестерня 1-й передачи,
- 17 - вспомогательная шестерня 1-й передачи,
- 18 - передний межколесный дифференциал.
В автоматических трансмиссиях ныне эксплуатируемых Subaru используется два основных типа 4WD.
Содержание
Постоянный передний привод, без межосевого дифференциала, подключение задних колёс гидромеханической муфтой с электронным управлением.

- 1 - демпфер блокировки гидротрансформатора,
- 2 - муфта гидротрансформатора,
- 3 - входной вал,
- 4 - вал привода масляного насоса,
- 5 - корпус муфты гидротрансформатора,
- 6 - масляный насос,
- 7 - корпус масляного насоса,
- 8 - корпус КПП,
- 9 - датчик частоты вращения турбинного колеса,
- 10 - муфта 4-й передачи,
- 11 - муфта заднего хода,
- 12 - тормоз 2-4,
- 13 - передний планетарный ряд,
- 14 - муфта 1-й передачи,
- 15 - задний планетарный ряд,
- 16 - тормоз 1-й передачи и заднего хода,
- 17 - выходной вал КПП,
- 18 - шестерня режима "P",
- 19 - ведущая шестерня переднего привода,
- 20 - датчик частоты вращения заднего выходного вала,
- 21 - задний выходной вал,
- 22 - хвостовик,
- 23 - муфта A-AWD,
- 24 - ведомая шестерня переднего привода,
- 25 - обгонная муфта,
- 26 - блок клапанов,
- 27 - поддон,
- 28 - передний выходной вал,
- 29 - гипоидная передача,
- 30 - насосное колесо,
- 31 - статор,
- 32 - турбина.
Этот вариант издавна устанавливается на подавляющее большинство Subaru (с АКПП типа TZ1) и широко известен еще по Legacy образца 89 года. По сути, этот полный привод такой же честный, как и свежий тойотовский Active Torque Control - те же самые подключаемые задние колеса и тот же самый принцип TOD (Torque on Demand). Межосевого дифференциала нет, а задний привод включается гидромеханической муфтой (пакет фрикционов) в раздаточной коробке.
Субаровская схема имеет некоторые преимущества в рабочем алгоритме перед другими типами подключаемого 4WD (особенно простейшими, вроде примитивного V-Flex). Пусть и небольшой, но момент при работе A-AWD передается назад постоянно (если только система не отключена принудительно), а не только при пробуксовке передних колес - это полезнее и эффективнее.
Благодаря гидромеханике перераспределять усилие можно немного точнее, нежели в электромеханическом ATC. Кроме того, A-AWD конструктивно долговечнее. У машин с вискомуфтой подключения задних колес существует опасность резкого самопроизвольного появления заднего привода в повороте с последующим неуправляемым полетом, но у A-AWD такая вероятность хоть и не исключена полностью, но значительно снижена. Однако с возрастом, по мере износа, предсказуемость и плавность подключения задних колес существенно уменьшается (см. Восстановление полного привода на Subaru Legacy (Замена фрикционов в автоматической коробке)).
Алгоритм работы системы сохраняется прежним в течение всего времени выпуска, лишь немного корректируясь.
- В нормальных условиях, при полностью отпущенной педали акселератора распределение момента между передними и задними колесами составляет 95/5 -- 90/10.
- По мере нажатия на газ, подводимое к пакету фрикционов давление начинает увеличиваться, диски постепенно поджимаются и распределение момента начинает смещаться в сторону 80/20. 70/30. и т.д. Зависимость между газом и давлением в магистрали отнюдь не линейная, а выглядит скорее как парабола - чтобы значительное перераспределение происходило только при сильном нажатии педали. При полностью утопленной педали фрикционы поджимаются максимальным усилием и распределение доходит до 60/40 -- 55/45. Буквально 50/50 в данной схеме не достигается - это не жесткая блокировка.
- Кроме того, установленные на коробке датчики частоты вращения переднего и заднего выходных валов позволяют определить пробуксовку передних колес, после чего максимальная часть момента отбирается назад независимо от степени дачи газа (кроме случая полностью отпущенного акселератора). Эта функция действует на малых скоростях, примерно до 60 км/ч.
- При принудительном включении 1-й передачи селектором (см. Селектор АКПП Субару и режимы работы автомата), фрикционы сразу поджимаются максимально возможным давлением - таким образом как бы определяются сложные вседорожные условия и привод сохраняется самым постоянно полным.
- При воткнутом в разъем предохранителе FWD повышенное давление к муфте не подводится и привод постоянно осуществляется только на передние колеса (распределение 100/0).
- По мере развития автомобильной электроники пробуксовки стало удобнее контролировать по штатным датчикам ABS и уменьшать степень блокировки муфты при прохождении поворотов или срабатывании ABS.
SF5A56 2.0, SF5B56..57 2.0, SF5C56..57 2.0, SF5A55 2.0T (T/tb до 09.98), SF9B58 2.5, SF9C58 2.5
Постоянный полный привод, с межосевым дифференциалом, блокировка гидромеханической муфтой с электронным управлением.

- 1 - демпфер блокировки гидротрансформатора,
- 2 - муфта гидротрансформатора,
- 3 - входной вал,
- 4 - вал привода масляного насоса,
- 5 - корпус муфты гидротрансформатора,
- 6 - масляный насос,
- 7 - корпус масляного насоса,
- 8 - корпус КПП,
- 9 - датчик частоты вращения турбинного колеса,
- 10 - муфта 4-й передачи,
- 11 - муфта заднего хода,
- 12 - тормоз 2-4,
- 13 - передний планетарный ряд,
- 14 - муфта 1-й передачи,
- 15 - задний планетарный ряд,
- 16 - тормоз 1-й передачи и заднего хода,
- 17 - промежуточный вал,
- 18 - шестерня режима "P",
- 19 - ведущая шестерня переднего привода,
- 20 - датчик частоты вращения заднего выходного вала,
- 21 - задний выходной вал,
- 22 - хвостовик,
- 23 - межосевой дифференциал,
- 24 - муфта блокировки межосевого дифференциала,
- 25 - ведомая шестерня переднего привода,
- 26 - обгонная муфта,
- 27 - блок клапанов,
- 28 - поддон,
- 29 - передний выходной вал,
- 30 - гипоидная передача,
- 31 - насосное колесо,
- 32 - статор,
- 33 - турбина.
Схема VTD (Variable Torque Distribution) применяется на менее массовых версиях с автоматическими коробками типа TV1 (и TZ102Y, в случае Impreza WRX GF8) - как правило, наиболее мощных в гамме. Здесь с честностью все в порядке - полный привод действительно постоянный, с несимметричным межосевым дифференциалом (45:55), блокирующимся гидромеханической муфтой с электронным управлением.
Кстати, по такому же принципу работал еще с середины 80-х годов тойотовский 4WD на коробках A241H и A540H, но сейчас, увы, он остался только на исходно-заднеприводных моделях (полный привод типа FullTime-H или i-Four).
К VTD Subaru обычно прилагает достаточно продвинутую систему VDC (Vehicle Dynamic Control), по-нашему - систему курсовой устойчивости или стабилизации. При старте ее составная часть, TCS (Traction Control System), подтормаживает буксующее колесо и слегка придушивает двигатель (во-первых, углом опережения зажигания, во-вторых, даже отключением части форсунок). На ходу работает классическая динамическая стабилизация. Ну и благодаря возможности произвольно тормозить любое из колес, VDC эмулирует (имитирует) блокировку межколесного дифференциала.
Конечно, это здорово, но не стоит серьезно полагаться на возможности такой системы - пока что ни у одного из автопроизводителей не получилось даже приблизить электронную блокировку к традиционной механике по надежности и, главное, эффективности.
Постоянный передний привод, без межосевого дифференциала, подключение задних колес вискомуфтой.
Вероятно, стоит упомянуть и про 4WD, применяемый на малых моделях с вариаторными коробками (вроде Vivio и Pleo). Здесь схема еще проще - постоянный передний привод и подключаемый вискомуфтой при пробуксовке передних колес задний мост.
Читайте также: