
Адаптация регулятора холостого хода ваз
В течении 3х летней эксплуатации каждый раз при наступлении зимы я бился над одним вопросом, как заставить свою машину заводиться в мороз без применения различных средств. К тому времени я уже и заменил ДМРВ и поставил новую БОШевскую катушку зажигания, заменил датчик положения дросселя, заменил датчик температуры, промывал форсунки, мерил давление в рампе, менял фильтра, сменил прокладки на коллекторах и устранил все подсосы воздуха, протирал фары до дыр и перекачивал колёса, но каждый раз при падении температуры ниже -25 и длительной стоянки, мотор не заводился и не даже схватывал, несмотря на то что стартер (редукторный) крутил очень бодро и даже при помощи прогретого (65 Ач) аккумулятора мотор не делал ни одной схватки, а просто тупо заливал свечи. Эфир при запуске так же не помогал заливало свечи и им. Диагностика ничего не показывала.
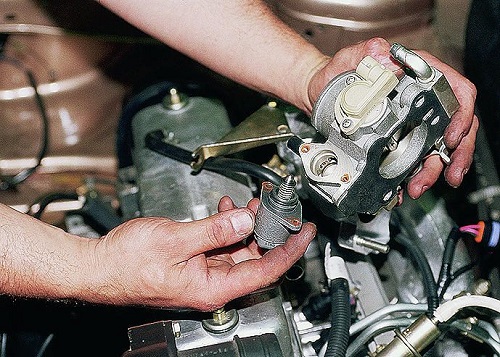
Но однажды как то я стал замечать такую картину: холостые обороты стали реже держаться в пределах 800 — 900 оборотов и чаще от 1000 до 1100 а иногда и 1300. Подрубал комп тот показывал мне что отсутствует признак холостого хода, заменил датчик дросселя ничего не помогло, решил в кое то веки снять дроссельный узел и его почистить. Процедура оказалась не нужной поскольку там было всё кристально чисто лишь немного было капелек воды от конденсата что идёт от вентиляции картера, но зато привлёк внимание регулятор холостого хода…
Фото конечно не очень хорошего качества но на нём можно разглядеть измененную форму клапана холостого хода, причём коррозии поддался определенный участок неравномерно но по кругу, в последствии чего клапан изменил свою форму далеко от нормальной. А значит дозировал воздух такой клапан неправильно! Что особенно важно при запуске холодного двигателя где пропорции бензина к воздуху идёт к увеличению бензина и уменьшению воздуха.
К коррозии скорее всего привело то что до кап ремонта двигателя через сапун поступало много масла и эмульсии, которая скорее всего и покоробила пластмассовый клапан.
После рассуждений мною был приобретен РХХ 2112-1148300-04 КЗТА Калуга
Что примечательно конечные цифры у номеров РХХ отличались. (об этом чуть позже) Главное результат Сегодня 8.01.2015 в 8:30 когда на улице было -30 град. Автомобиль без каких либо колебаний завелся на ура! Радости моей не было предела! Я можно сказать побил свой рекорд!
А теперь конкретно о работе РХХ. У меня появлялись проблемы с управлением холостых обортов и меня это вынудило окончательно разобраться в строении РХХ и принципе его работы.
Начну сначала. Несмотря на свой внушительный вид и название данный регулятор простой и тупой, потому как состоит он грубо говоря из 2х моторчиков с общим якорем-шнеком и иглы с направляющей а на конце которой выполнен клапан определенной формы. 4ре контакта, имеющихся у регулятора, позволяют управлять иглой, координировать её относительно калибровочного гнезда а так же задавать нужную скорость перемещения. В регуляторе отсутствует какое либо устройство позволяющее отслеживать положение иглы относительно гнезда, и поэтому существует определенная методика калибрования регулятора, заложеная в программе ЭБУ.
В интернете частенько встречал рекомендации о взаимозаменяемости РХХ и о подборе их аналогов а именно то что при подборе важно смотреть на последние цифры к примеру датчик с номером 2112-1148300 — 01 лучше заменить таким же или 2112-1148300 — 03 а датчик с номером 2112-1148300 — 02 заменить таким же или на 2112-1148300 — 04.
В данных случаях циферные обозначения на конце кода говорят лишь об изготовителе и об обновлённых моделях этих регуляторов, к примеру датчики 2112-1148300 — 01 и 03 изготовлены одним и тем же предприятием "Пегас" просто в 03 видоизменен клапан он имеет расширеную юбку и защиту иглы от загрязнений, тоже самое и с калужскими регуляторами 2112-1148300 — 02 и 04
Посему я сделал вывод что подобные суеверия связаны лишь с тем что при замене производителя регулятора, (как в принципе я считаю при любой замене) необходима калибровка датчика или как говорят "обучение", то есть настройка иглы относительно гнезда.
Здесь как я вижу есть 2 выхода из положения, лично я пробовал оба.
1 Если имеется возможность управлять регулятором вручную (к примеру диагностическое оборудование или при помощи некоторых моделей бортовых компьютеров) достаточно завести двигатель, держать педалью газа обороты около 3000 и задать положение регулятора холостого хода равное 0 (делалось на блоке январь 7.2 для других, значение может быть иное) Вообщем клапан нужно закрыть. Клапан закроется обороты упадут но двигатель будет работать так как держим холостые педалью газа, затем глушим мотор и повторяем процедуру ещё 2 раза. После этих попыток клапан регулятора хоть раз но полностью упрётся в калибровочное гнездо, а значит перед следующим запуском клапан будет обучен.
2 Система может откалибровать регулятор самостоятельно, мало того она делает это каждый раз после выключения двигателя. После того когда мы поворачиваем ключ замка зажигания к 0 и мотор глушится, система доводит клапан в сторону закрытия калибровочного гнезда, клапан упирается, то есть шаги обнуляются, а затем система приоткрывает его на определенное количество шагов. Тем самым ЭБУ уверен в том что игла находится именно в том положении в котором она записана в памяти.
Импульс на закрытие клапана длиннее чем на открытие, а значит если вы устанавливаете новый клапан открытый на предельно максимальное количество шагов, то значит чтобы перед первым запуском двигателя его откалибровать достаточно выполнить цикл: "Включение зажигания — выключение зажигания — задержка на 5 секунд" N-количество раз, (допустим 8 раз) и регулятор окончательно откалибруется и система будет работать без перебоев.
При покупке нового регулятора важно не напороться на подделку, тогда суеверия могут воплотиться в жизнь, тем самым окончательно навредив здравому смыслу и испортив удовольствие от новой приобретенной вещи. О том как отличить оригинал от подделки есть множество статей и видео в интернете, посему желаю удачи в поисках.
Всё вышесказаное основывалось на собственных наблюдениях и размышлениях и может быть здраво оспорено и обосновано. :)
Проверка и чистка РХХ (делаем все на полностью остывшем двигател):
1. Снимаем патрубок, идущий от воздушного фильтра к дросселю, под ним стоит РХХ, снимаем с РХХ разъем, выкручиваем три болта, вынимаем из корпуса дросселя РХХ, подключаем обратно разъем, держим РХХ в раскрытой ладони.
2. Второй человек садится за руль и включает-выключает зажигание (но не заводит двигатель), без пауз, повторяя серию "включил-выключил" раз 50-60 (чем больше повторений — тем точнее тест).
3. Каждый раз РХХ должен своим носиком отработать "туда-сюда" в осевом направлении, амплитуда около 1мм. Если его хоть раз подклинит или что-то будет не так визуально — РХХ уже "болеет".
4. Если РХХ разогреется так, что его невозможно будет держать в руке — обычно это говорит о межвитковом замыкании, в его наличии или отсутствии можно убедиться, проверив обмотки РХХ тестером:
---------------------------------------------------------------------------------------------------------------
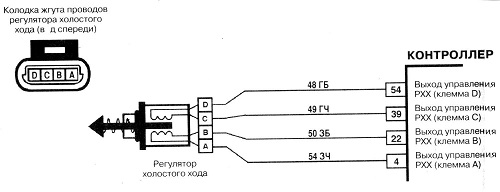
Измерьте тестером в режиме омметра сопротивление между двумя крайними выводами нижнего ряда в колодке регулятора:
Затем поочередно между средним и каждым из двух боковых выводов:
Повторите указанную проверку для выводов верхнего ряда колодки.
Сопротивление должно быть в пределах 0,030-0,060 кОм.
Если при каком-либо измерении сопротивление отличается от указанного, регулятор неисправен и его следует заменить.
---------------------------------------------------------------------------------------------------------------
5. Чистка РХХ — промыть карб-клинером, продуть сжатым воздухом, обильно смазать жидкой универсальной силиконовой смазкой (аэрозоль), повторить тест из пп.2-4, если РХХ не начал нормально работать — стоит искать новый или с разборки, если сопротивление обмоток в норме — можно установить Ремкомплект РХХ Amadeus.
При возможности — полная разборка РХХ и смазка трущихся пластиковых частей (оригинальных или из нашего ремкомплекта) консистентной термостойкой смазкой (в нашем ремкомплекте уже нанесена).
Ремкомплект РХХ на Mitsubishi Lancer IX, 1.6 (4G18) от Amadeus Productions
6. После тестирования и смазки-мойки РХХ желательно сделать адаптацию ХХ.
Адаптация ХХ (можно делать на остывшем или на прогретом двигатале):
1. Снимаем клемму с аккумулятора на 15 минут (плюс или минус — неважно).
2. Одеваем клемму обратно.
3. Заводим машину, даёте поработать ей ровно 10 минут на холостом ходу, все нагрузки выключены.
4. Глушим машину, пауза 10 секунд, заведите опять.
5. Ждем прогрева двигателя до рабочей температуры и смотрим обороты — если встали на 750-800 — все окей.
6. В последующие 100-150км пробега всё должно нормализоваться.

Методика настройки Холостого Хода
При построении относительно нестандартных двигателей (то есть там, где оставлено регулирование с помощью РХХ) довольна частая ситуация – полное или частичное отсутствие холостого хода, когда заставить работать его можно только постоянно подгазовывая, то есть выводя из режима ХХ, т.к система регулирования ХХ напрочь отказывается стабилизироваться. Иногда для получения более менее стабильных оборотов приходится прогревать двигатель почти до рабочей температуры.
Что же делать? Браться за инженерный блок J 5 (J 7 ) Оnline Tuner. Но сначала немного теоретической информации:
П‑Регулирование.
П‑регулятор который управляет углом зажигания и предназначен для точного регулирования, те регулирования при небольших отклонениях оборотов от желаемых. Если разность желаемых оборотов и текущих больше переменной «Зона нечувствительности», происходит изменение угла зажигания на ХХ:
UOZ = UOZXX + KUOZ * EFREQ, где:
UOZXX – УОЗ на ХХ минус Коррекция УОЗ на ХХ;
EFREQ – Текущая ошибка оборотов при регулировании.
MINEFR – Зона нечувствительности.
KUOZ – Коэффициент коррекции УОЗ, принимается равным «Пропорциональному коэффициенту регулятора УОЗ_ 1 (высокие обороты)», если ошибка положительна (EFREQ > 0 ) или «Пропорциональному коэффициенту регулятора УОЗ_ 2 (низкие обороты)», если ошибка отрицательная (EFREQ < 0 ).
Величина приращения УОЗ (KUOZ * FREQ) ограничивается величинами UDMIN и UDMAX взятыми из соответствующих таблиц «Минимальное и Максимальное смещение УОЗ».
Физически данное регулирование регулирование служит для обеспечения возврата фактических оборотов к желаемым: чем больше отличие оборотов от желаемых оборотов, тем больше изменится УОЗ в сторону для обеспечения возврата к ним, «Пропорциональный коэффициенту регулятора УОЗ 1 » увеличивает обороты, если они меньше желаемых, а «Пропорциональный коэффициент регулятора УОЗ 2 » снижает их.
ПИ-Регулирование.
Второй «регулятор» отвечает за работу РХХ. Механизм его регулирования немного сложнее П‑регулятора, т.к. у РХХ нет четко заданной уставки для ХХ, РХХ приходится регулировать от того положения в котором он находится в момент наступления ХХ. Поэтому очень важно чтобы когда этот момент наступает, РХХ находился как можно ближе к тому положению в котором будет осуществляться регулирование. Для этого необходимо правильно настроить возврат оборотов их режима ПХХ.
Работа ПИ-регулятора определяется формулой:
SSM = SSM + TMFR * (KFRI * EFREQ + KFR * (EFREQ – EFRET)),
SSM – положение РХХ, шаг.
TMFR – Жесткость регулятора частоты вращения – коэффициент, задающий скорость изменения положения РХХ в зависимости от разницы оборотов от заданных.
KFR – Пропорциональный коэффициент РХХ – как и в случае с УОЗ регулированием, определяет отклонение РХХ в зависимости от разницы оборотов. Чем больше разница, тем больше будет смещение РХХ от текущего.
KFRI – Интегральный коэффициент РХХ – временной коэффициент, изменяет шаги РХХ, в зависимости от времени непопадания в заданные обороты. Чем дольше по времени обороты не были равны заданным, тем больше будет отклонение РХХ.
EFREQ – Текущая ошибка оборотов при регулировании.
EFRET – Ошибка оборотов на предыдущем цикле регулирования.
Если разница оборотов заданных и текущих превысила «Ограничение оборотов для интегратора», то она принимается равной этой величине.
Физический смысл регулятора сводится к тому, что чем больше отклонились обороты от заданных и чем больше по времени они были отклонены, тем больше будет разница в положении РХХ между текущим и следующим, то есть, в отличие от П‑регулятора УОЗ, регулирование осуществляется ступеньками, РХХ будет приближаться к положению регулирования не мгновенно, а значит возможно перерегулирование – срыв ХХ в синусоидальные колебания оборотов со значительной амплитудой.
Практика.
Очевидно, что мы никак не можем напрямую повлиять на текущее положение УОЗ или РХХ на ХХ. Единственное чем мы можем оперировать, это коэффициентами, причем во время настройки РХХ нужно чтобы нам не мешал УОЗ и наоборот.
Для начала нужно выбрать желаемые обороты ХХ. Рекомендуется выбирать обороты чуть выше гарантированных, для того, что бы избежать проблем при движении на ПХХ и при значительном изменении нагрузки.
Настройка проводится в три этапа:
Этап 1 . Предварительная настройка ПИ-регулятора РХХ.
Выставляем смещение РХХ при включении вентилятора в 0 (По окончании настройки его нужно вернуть обратно). Выставляем «Ограничение оборотов для интегратора» примерно на две трети значения разности между желаемыми оборотами ХХ и «вторым переходным режимом».
Пример: ХХ = 1100 , обороты второго режима = 1400 , тогда «Ограничение оборотов для интегратора» будет ( 1400 – 1100 ) * 2 / 3 = 200 .
Это необходимо, чтобы «подхватывалось» регулирование в момент входа в ХХ и при этом не было бы перерегулирования и резкого провала по оборотам. 2 / 3 – относительный параметр, полученный практически, придерживаться его необязательно, но, в любом случае, делать «Ограничение оборотов для интегратора» больше разницы ХХ и ХХ 2 нет смысла.
Далее, открываем «Окно диагностики» в J 5 OLT, «Прямое управление ИМ» – фиксируем УОЗ, например, на 16 градусах. Далее, устанавливаем интегральный коэффициент в 0 и настраиваем только «Пропорциональный коэффициент». Нужно установить такой пропорциональный коэффициент, чтобы РХХ вставал навстречу изменяющимся оборотам. Это хорошо видно на графиках. Обороты должны перестать быть волнообразными, если они будут рваными, но удерживаться рядом с заданными, переходим к настройке П‑регулятора УОЗ.
Этап 2 . Настройка П‑регулятора УОЗ.
После того как мы добились желаемого ХХ, который не плавает волнами, надо настроить точное регулирование УОЗ-ом. Для этого нужно иметь представление, в каких пределах мы можем с помощью УОЗ влиять на обороты. Открываем «Окно диагностики» в J 5 OLT, «Прямое управление ИМ» – фиксируем РХХ на среднем положении, в котором он пребывает и начинаем двигать углом, так же через прямое управление. При увеличении угла обороты должны расти, а при уменьшении – падать. Причем, если при увеличении УОЗ, они растут, то при дальнейшем увеличении они начинают опять падать. Увеличиваем, запоминаем угол, при котором обороты еще растут, но скоро будут падать, например, 27 град. (при 30 , например уже начинается спад). Дальше снижаем до порога, при котором работа двигателя еще устойчива и обороты реагируют на уменьшение УОЗ и запоминаем его, например это 5 градусов (при 3 , уже начинается неустойчивая работа или УОЗ перестает влиять).
Рассчитываем средний угол, который и будет углом зажигания. УОЗХХ = ( 27 + 5 ) / 2 = 16 .
Рассчитываем максимальную величину смещения: UDMAX = – UDMIN = 27 – 16 = 11
Выставляем в прошивке УОЗ на ХХ 16 градусов, «коррекция УОЗ на ХХ» поднимаем/опускаем так, чтобы оно было равно 0 при рабочих температурах. Смотрим, какое наполнение мотора на ХХ, и в калибровках Максимального и Минимального смещения УОЗ выше этого наполнения ставим 1 и ‑ 1 градус соответственно, а ниже и при нем, 11 и ‑ 11 соответственно, тем самым не давая вывалиться углу за рабочие пределы регулирования.
Зона нечувствительности выставляем 10 оборотов, т.к П‑регулирование это все-таки точная настройка на малых отклонениях.
На этом настройка П‑регулятора закончена и опять переходим к ПИ-регулированию с помощью РХХ, не забыв зафиксировать УОЗ на наших вычисленных 16 градусах.
Внимательно следим за изменением оборотов и на то как УОЗ этому противостоит. Необходимо, используя коэффициенты, добиться чтобы УОЗ двигался «навстречу» скачку оборотов даже несколько больше чем это нужно, как бы упреждая раскачку оборотов, то есть, УОЗ должен резко реагировать на изменение оборотов и не должен быть плавным и волнообразным.
Сначала настраиваем Высокие обороты выставляя в ноль коэфф_ 2 , и меняя коэфф_ 1 от 0 и вверх. Затем начинаем повышать коэфф_ 2 от 0 так же вверх, следя за изменением реагирования УОЗ на изменение оборотов. Если взять большие коэффициенты, то работа мотора будет резкой, жесткой на слух, произойдет перерегулирование и обороты опять начнут плясать. В идеале получаем скачущий УОЗ навстречу изменениям в оборотах.
Этап 3 . Окончательная настройка ПИ-регулятора РХХ.
Теперь нам фактически надо повторить первый этап настройки, то есть добиться ровного ХХ, меняя П‑коэффициент регулятора, не трогая И‑коэффициент, который равен 0 . Разница в том, что мы теперь делаем это при правильном угле и в будущем нам будет помогать УОЗ регулятор, но для начала нам надо правильно настроить Жесткость регулятора РХХ, чтобы она соответствовала условиям работы. Раньше ее настраивать не имело смысла, рабочее наполнение было бы другим.
Смотрим обороты ХХ/наполнение, открываем «Жесткость регулятора РХХ» и делаем так, чтобы при ХХ и наполнении на ХХ, в таблице стоял коэффициент 1 , а при отклонении от режимной точки ХХ, коэффициент увеличивался.
Получится как бы трехмерная чашка, у которой на дне область режимных точек ХХ с коэффициентами 1 и по мере отдаления от ней коэффициент растет. Тем самым обеспечивается быстрое изменение числа шагов РХХ при удалении оборотов от заданных.

Рис. 1 Примерный вид настроенной жесткости регулятора ХХ
Далее, окончательно настраиваем П‑коэффициент, к этому времени, обороты уже должны быть достаточно устойчивыми и РХХ будет колебаться несильно, отзываясь на достаточно сильные изменения оборотов. Теперь дошла очередь до И‑коэффициента. Увеличиваем его, плавно с 0 , по одному шагу, смотрим что происходит с РХХ и оборотами. Увеличиваем до тех пор, пока РХХ и за ним обороты не начнут скачком, неожиданно изменяться верх/вниз от устойчивого состояния, делаем пару-тройку шагов назад и считаем настройку оконченной.
Как показала практика, численные значения И‑коэффициента колеблется от 1 / 5 до 1 / 10 от значения П‑коэффициента.
Напоследок отметим некоторые моменты при калибровки системы по дросселю.
Если вы используете прошивки, не поддерживающие коррекцию расчетного наполнения по положению РХХ, то использовать ПИ-регулятор РХХ в стандартном виде нецелесообразно, так как при изменении положения РХХ фактически будет меняться количество воздуха, поступающее в двигатель, что никак не будет учитываться и приведет к изменению состава смеси на ХХ. В совокупности с включенным лямбда – регулированием это может вызвать раскачку оборотов и выход состава смеси за допустимые пределы.
В таких случаях сам по себе РХХ оставить в системе можно и нужно, но критерии выбора П‑коэффициента будут другими. В таких системах регулирование оборотов ХХ целесообразно возложить почти полностью на регулятор УОЗ, а регулирование количества воздуха через РХХ свести к минимуму. Для того, чтобы при включении нагрузки (например, фары) регулятор УОЗ не входил в насыщение (то есть, УОЗ не упирался в верхний предел), в качестве базового УОЗ на ХХ необходимо выбирать меньшие значения, чем описано выше. В этом случае, диапазон регулирования вверх будет шире, чем вниз. Из практики можно сказать, что средний УОЗ на ХХ необходимо опустить относительно расчетного на 3 .. 6 гр. Дополнительной мерой борьбы с провалами оборотов при включении мощных электрических нагрузок может служить увеличение значений желаемого УОЗ на ХХ в зоне оборотов ниже желаемых оборотов ХХ на прогретом двигателе.

Рис. 2 Примерный вид таблицы желаемого УОЗ на ХХ с коррекцией УОЗ на оборотах ниже ХХ
В этом случае, при резком падении оборотов отклик регулятора УОЗ будет более резким, так как коррекция УОЗ будет состоять из двух частей: прибавка, расчитанная П‑регулятором по степени ошибки оборотов плюс табличная прибавка желаемого УОЗ.
Теперь рассмотрим особенности настройки регулятора РХХ. Как уже писалось выше, нам необходимо минимизировать движение РХХ, чтобы количество воздуха через РХХ оставалось практически неизменным при регулировании. Для этого необходимо исключить И‑составляющую, путем выставления интегрального коэффициента в 0 и минимизировать пропорциональную составляющую так, чтобы РХХ в процессе регулирования РХХ не двигался (или двигался не более, чем на 1 шаг). Для настройки П‑коэффициента надо временно отключить регулятор УОЗ путем выставления его коэффициентов регулирования в 0 и убрать коррекцию желаемого УОЗ (тоже временно) на оборотах ниже ХХ (см. Рис. 2 ). Выставьте пропорциональный коэффициент РХХ в минимальное значение (но не в ноль!). Попробуйте включить фары и обогрев стекла, при этом обороты ХХ упадут ниже желаемых (двигатель при этом глохнуть не должен). Увеличивая П‑коэффициент, добейтесь того, чтобы РХХ открылся на 2 – 3 шага, при этом обороты ХХ могут и не подняться до желаемых, но повыситься. Сильнее открывать РХХ за счет пропорционального коэффициента нет необходимости, окончательную стабилизацию оборотов сделает регулятор УОЗ после его включения. Главное, чтобы РХХ компенсировал некоторую часть падения оборотов, чтобы регулятор УОЗ не «задирал» угол в верхний предел. После этого включите регулятор УОЗ и проверьте работу ХХ в том числе и при включении мощных нагрузок. В нормальном режиме регулирования (без включения нагрузок) положение РХХ должно либо оставаться неизменным, либо изменяться не более, чем на 1 шаг.
Вот, собственно и все. Этой методики вполне достаточно для того что бы настроить ХХ практически на любом авто с алгоритмическими системами впрыска, даже неисправном.
Каждый автолюбитель с большим опытом вождения помнит о том, когда российские дороги был заполнены Жигулями и Москвичами. Эти автомобили отличались тем, что отремонтировать их мог практически каждый автолюбитель самостоятельно.
Как поднять обороты холостого хода на инжекторе ВАЗ 2114
Низкие обороты ваз 2114 можно отрегулировать при помощи специального датчика для холостого хода, хотя в современном ВАЗе уже не так просто отрегулировать холостой ход, как это было раньше. Для того, чтобы разобраться во всех нюансах, следует изучить строение некоторых элементов автомобиля.

Из чего состоит инжектор
Инжектор на этом автомобиле состоит не из одной части, а представляет собой сложную конструкцию, включающую:
- датчики;
- ЭБУ;
- форсунки.

Датчики
Сегодня используются различные технологии и методы для того, чтобы подавать топливо в ВАЗ 2114. Контроль за этим процессом осуществляется при помощи датчиков. Кроме того, автомобиль оборудован дополнительными системами слежения, позволяющими определить косвенные причины его перерасхода.
Самыми популярными из них можно назвать следующие:
- Датчики кислорода.
- Датчики коленвала.
- Датчики ПДЗ.
- Датчики детонации и некоторые другие.
Как отрегулировать холостой ход на ваз 2114 инжектор
В некоторых случаях происходит повышение оборотов в то время, когда двигатель полностью прогрет. Всё это свидетельствует о проблемах, связанных с работой регулятора холостого хода. Также причина может заключаться и в бедной смеси.

Причина неисправности часто заключается в слишком большой подаче воздуха.
Для того, чтобы провести регулировку, потребуется компьютер, способный собрать данные от самых разнообразных датчиков, установленных на автомобиле. Сделать это вручную невозможно. Это означает, что обойтись своими силами не получится. Для ремонта в обязательном порядке требуется наличие специального оборудования.
Дополнительная информация.Как можно сэкономить на ремонте? Для того, чтобы регулировка не обошлась в слишком большую сумму, можно поискать частного механика, который обладает необходимым оборудованием для ремонта.
С помощью компьютера можно открыть тот либо иной клапан. Сделать это иначе практически невозможно. Ни в коем случае не стоит пытаться открыть клапан вручную, ведь это может быть опасно не только для вашего здоровья, но и для автомобиля, который окончательно выйдет из строя в случае неправильного ремонта.
Открывать клапан с помощью компьютера необходимо только с определённой величиной. Если не соблюдать данный показатель, то провести регулировку также не получится.

Правила ремонта
Регулятор холостого хода представляет собой специальный орган исполнительного назначения, который необходим для функционирования двигателя в нормальном режиме. Если он окажется неисправен, то не будет гореть индикатор, который указывается на эту неисправность. Это означает, что определить проблему может быть достаточно просто. Остаётся только устранить её как можно скорее.
Уровень потока задаётся электроникой автомобиля. Столь сложная система позволяет работать мотору работать максимально равномерно и стабильно. Также электронная система машины выполняет функцию по защите от внешних факторов, ведь двигатель функционирует в штатном режиме практически при любых обстоятельствах.
У ВАЗ 2114 низкие обороты на холостом ходу
Что же необходимо сделать, чтобы отрегулировать работу столь важной части автомобиля?


Регулятор холостого хода
Датчик холостого хода ВАЗ 2110 (сокращенно ДХХ) является исполнительным приспособлением, а попросту клапаном состоящим из электродвигателя, пружины, штока на котором установлена запорная игла (можно посмотреть на фото). Именно посредством которой дозируется объем воздуха. То есть, когда дроссель ВАЗ 2110, 2112 полностью закрыт, а контроллер определяет, что нужно повысить обороты холостого хода, то РХХ формирует команду на изменение положения иглы. Она перемещается, приоткрывая частично или полностью впускное отверстие, через которое воздух идет в обход дросселя, а затем смешивается с топливом. В результате двигатель не глохнет.
Признаки неисправности РХХ
Как снять РХХ
Если обнаружены признаки неисправности свойственные РХХ, то его нужно будет снять (сначала для проверки). На ВАЗ 2110 данный датчик, имеющий небольшие размеры (легко помещается на ладони) расположен в посадочном месте на корпусе дроссельного узла (можно посмотреть на фото).
Демонтаж регулятора холостого хода
Выполняется демонтаж в следующей последовательности:
- ВАЗ 2110 ставится на ручной тормоз;
- Отсоединяется минусовая клемма АКБ;
- Отсоединяется жгут проводов подведенных к РХХ;
- Обязательно зачищается место соединения датчика с корпусом дросселя, чтобы предотвратить попадание грязи, ржавчины в отверстие;
- Выкрутить винты крепления удерживающие датчик холостого хода ВАЗ 2110.
Как проверить датчик?
При наличии тестера проверку выполнить несложно:
Когда в результате указанных проверок датчика обнаружено несоответствие показаний, то его следует заменить. Также нерабочее состояние данных датчиков двигателя ВАЗ 2110, 2112, в открученном положении, можно проверить, присоединив к ним колодку, затем необходимо включить зажигание.
Спасибо за подписку!
Чистка РХХ
Любой нерабочий датчик холостого хода ВАЗ 2110 рекомендуется помыть, почистить, чтобы точно убедиться в его неисправности. Процесс очень простой, много времени не отнимет. Для выполнения работы необходим: очиститель карбюратора, WD-40. Выполняются следующие действия:
Когда РХХ ВАЗ десятого семейства не заработал в штатном режиме, то износились направляющие иглы, оборвался провод внутри корпуса. В данных случаях регулятор холостого хода подлежит обязательной замене.
На ВАЗ 2110 датчик холостого хода монтируется в порядке обратном демонтажу.
Читайте также: