
Автокорректор фар для ксенона своими руками схема
Некоторое время назад пришла посылка с линзами, лампами и блоками, но не писал, так как, с момента открытия заветной коробочки, был основательно увлечён изучением работы автокорректора. Но обо всём по порядку.Итак, в посылке меня ждал приятный сюрприз, а именно несколько моторчиков автокорректора — раздолье для экспериментов!
Целью данного поста вижу описание основных принципов работы создаваемой системы, а также способов её изготовления.
1.Готовые решения
Всегда можно пойти по пути наименьшего сопротивления и купить готовый набор, а при желании заплатить и за установку
Автокорректоры, которые мне довелось повидать в продаже:
1) ALS (Auto Leveling System)
или иное название от ноунейм-производителя, коих масса.
Представляет собой устройство, сердцем которого является "датчик положения горизонта". Подключается к имеющимся моторчикам и датчику скорости.
При движении машины — отключается.
Цена в среднем: от 3500р до 4500р
Плюс, пожалуй, у данной модели один — это простота установки. Выбрал нужное положение относительно машины и горизонта, о чём намекает стрелка на корпусе и пузырёк, закрепил, настроил с помощью пульта и готово.
Минусы:
— Тотально неверная работа в гористой местности, да и просто при движении с уклоном.
— Ненулевая вероятность, оставив машину на неровной поверхности, потом ехать и выжигать всем глаза вплоть до остановки.
Представьте ночную трассу, вы остановились на уклоне (на обочине), справили нужду, и до следующей такой остановки едите с поднятыми фарами и слепите всех или с опущенными и сами ничего не видите.
Стоит отметить, что некоторые модели делают "кивок", что, по разговорам, в первую очередь контролируют гайцы.
2) Автокорректора Hella
Самый дорогой вариант. Определение положение кузова с помощью УЗ-датчика, измеряющего расстояние между днищем машины и дорогой. Насколько понял, корректирует постоянно с задержкой 2-3 секунды. Настройка весьма интересная с помощью поднесения магнита к управляющему блоку (эдакая уличная магия).
Недостаток следующий: тяжело выбрать положение датчика так, чтобы он всегда корректно отрабатывал (да и не возможно в принципе). В связи с этим, либо при езде по колее, либо при таком движении, что датчик будет смотреть прямо в колею, а колёса будут вне колеи, будет наблюдаться неправильная работа.
Так же делает "кивок".
Цена около 7000р.
3) Автоматический корректор наклона фар "Зенит"
Отечественная разработка, корректирует наклон фар по датчику положения задней оси. Более похож на настоящий автокорректор.
Для подключения необходим ручной корректор.
Кивок есть, но не во всех версиях.
Цена комплекта с одним датчиком 2750руб,
4) Комплект заводского корректора б\у
Почему б\у? Потому что покупать по частям новый комплект — чистой воды издевательство, выльется в круглую сумму (или даже две).
Б\У комплект стоит около 9000р. хотя на каждой разборке свои правила.
Недостатков по функционалу тут вряд ли можно найти, работать он будет как надо.
Вопросы в другом:
Во-первых, естественный износ, неизвестно сколько он работал ранее, 10 или 20 лет, и возможно вскоре понадобится замена тех или иных частей, что повлечёт очередные и немалые траты.
Во-вторых, проблема настройки сего чуда. Например, если на джип поставить комплект от легковушки, до кучи ещё и с низким клиренсом, то получится полная ерунда. Надо думать, ведь у джипа гораздо выше расположены фары, соответственно и угол их утановки следует регулировать совсем иначе.
Ну и до кучи моторчики автокорректора — шаговые, несколько отличаются от стандартных (аналоговых), в том числе и корпусом. Соответственно необходимо ещё допиливать корпус фары, а если изначально моторчик располагался внутри фары ( что не редкость) то ещё и городить какие-то приспособления.
2. Что есть "кивок" и зачем он нужен.
Для понимания необходимости этого процесса в конечной системе, необходимо рассмотреть принцип действия моторчиков корректора различных типов.
Условно разделим электрические моторчики на два класса:
1)Аналоговые;
2)Шаговые.
"Аналоговые" моторчики представляют собой целую систему, предназначение которой — следить за напряжением на сигнальном проводе и выравнивать по нему своё внутренне напряжение."Внутренним" следует считать выходное напряжение на маленьком потенциометре, положение которого напрямую связано с положением штока. Соответственно приходящему напряжению ( крутим крутилку в салоне), система крутит моторчиком в одну или другую сторону для достижения требуемого напряжения.
Из-за такого принципа работы все аналоговые моторчики:
-имеют всего 3 провода: плюс, земля, сигнал;
-как правило, довольно медленные (относительно шаговых);
-имеют множество шансов для выхода из строя: от повреждений мотора до повреждений или заеданий шестерней редуктора;
-относительно низкая точность позиционирования штока корректора;
-со временем начинают рыскать из-за износа потенциометра.
"Шаговые" моторчики — уже не столь сложно устроенный механизм. В основе лежит, что очевидно из названия, шаговый двигатель. Запустить его в домашних условиях немного сложнее аналогового, но всё же вполне возможно.В имеющихся у меня моторчиках все двигатели оказались двухобмоточные биполярники, что диктует особую схему управления ими.
Использование шаговых двигателей вполне оправдано при создании автокорректора, в первую очередь, из-за отсутствия столь разнообразных мест потенциальной поломки, а в частности отсутствия потенциометра. Позиционирование в таком случае происходит за счёт совершения определённого числа шагов.
Не буду грузить теорией, вкратце про шаговые моторчики:
— значительно быстрее аналоговых;
— позволяют точно позиционировать шток;
— более износостойкие;
— для управления необходим драйвер или контроллер;
— количество управляющих проводов начинается от 4, это основное визуальное отличие. Количество проводов зависит от конструкции двигателя (количества обмоток и способа их соединения).
И всё же про "кивок".
Всё просто, в аналоговом моторчике напряжение на сигнальном проводе напрямую связано с положением штока корректора.При подаче питания на блок корректора, можно более-менее точно предполагать в какой точке своего пути окажется шток корректора. В случае с шаговыми двигателями мы лишены данной возможности.
Поэтому "мозгам" автокорректора приходится опускать фары максимально вниз, а затем поднимать на установленное при настройке число шагов, чтобы в последствии отталкиваясь от данного положения, используя данные с датчиков загруженности осей, удерживать СТГ в установленном положении.
Отмечу, что "кивок" в имеющихся в продаже корректорах не всегда выполняется так. Иногда фары просто опускаются до минимума, затем поднимаются до максимума и после этого устанавливаются в настроенное положение.
В случае с ксеноном считаю это совсем безобразием, ведь фары лупят, а пока моторчик дотолкает их вверх, а потом ещё и сверху до середины, вас проклянут уже не один раз.
Далее опишу изготовление пробной версии устройства.
Спасибо всемм, кто осилил мой полуночный труд)
Как показывает статистика, примерно половина всех ДТП происходит в темное время суток либо в условиях недостаточной видимости. По мнению специалистов, большая часть аварийных ситуаций происходит по вине осветительных приборов автомобиля. Для улучшения качества освещения разработано такое устройство, как автокорректор фар, установить которое по силам любому владельцу.

Ясно, что данная проблема не могла долгое время оставаться без внимания. Поэтому начиная с 1990 года системой автокоррекции стали оснащаться все автомобили, производимые на территории Германии. А так как с 2010 года началось массовое использование ксеноновых осветительных приборов, то на каждом автомобиле подобный прибор обязан присутствовать.
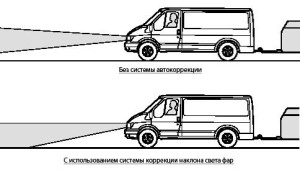
Необходимость в системе коррекции
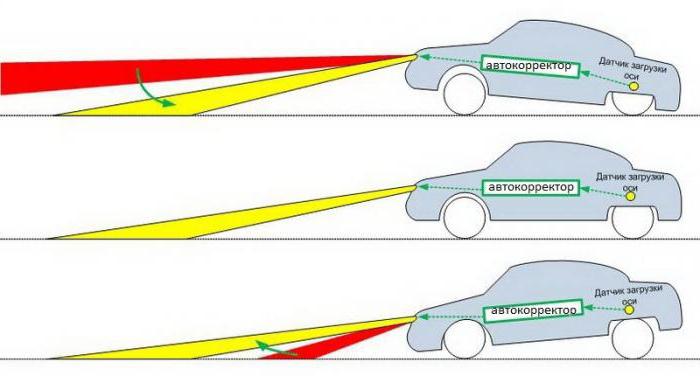
При движении автомобиля в ночное время важно, чтобы фары хорошо освещали путь. Однако правильная регулировка не во всех случаях способствует безопасному передвижению в сумерках. Это объясняется тем, что в случаях изменения подвески автомобиля из-за загрузки багажника или присутствия пассажиров, световой поток меняет свою траекторию. В результате это приводит к снижению уровня освещенности фар и ослеплению встречных водителей.
Поэтому возникает необходимость в постоянной корректировке светового потока относительно вертикальной плоскости посредством специальных устройств (не помешает узнать, как работает автокорректор фар). Есть практически аналогичные приборы – датчики автоматического включения фар. Но между ними существенная разница, поэтому не стоит их путать.
Достоинства ксенонового освещения
В настоящее время галогенные осветительные приборы теряют свою актуальность и по вполне понятным причинам заменяются ксеноновыми фарами. Своим названием они обязаны названию газа – ксенона, через который пропускается электрический разряд, что приводит к свечению. Помимо газа, находящегося под высоким давлением, стеклянная колба фары содержит менее 1 мг ртути и солей металлов. В чем заключается одно из основных преимуществ.

Но помимо этого, стоит выделить три основных ключевых момента, которые существенно выделяют ксеноновые фары среди прочих аналогов с приставкой более:
- Яркий свет.
- Безопасное освещение.
- Долгий ресурс.
Свет от ксеноновых фар существенно ярче, чем от галогенных источников. Причем неважно, дальнее это или ближнее освещение. Сам свет имеет голубоватый оттенок, что приближает его к дневному. Благодаря этому существенно улучшается видимость в ночное время.
Устанавливая автокорректор фар для ксенона, можно заметить улучшение контрастности и цветовой глубины, что ведет к снижению нагрузки на глаза. Более того, их свет не ослепляет водителей встречного транспорта и лучше отражается от специальной краски на дорожных знаках.
Но что самое главное – это срок службы, который намного выше, чем у галогенных фар (раза в 2 или даже 3). В силу отсутствия нитей накаливания, ксеноновые лампы более стойки противостоят ударам и вибрации. А благодаря использованию ионизированного газа, на 25% снижается потребление электроэнергии. Если повезет, то лампы могут прослужить на протяжении всей «жизни» автомобиля без замены.
Условия безопасного вождения
В настоящее время в связи с увеличением производства автомобилей, в городах встречается большой транспортный поток. В таких условиях важно обеспечивать оптимальную дистанцию до впереди идущего автомобиля, чего легко добиться при помощи автокорректора фар (ВАЗ и др.). В особенности при передвижении поздним вечером или ночью. Для этого необходима высокая точность регулировки осветительных приборов.

Начиная с 2010 года у автомобилей с ксеноновыми фарами в обязательном порядке должна присутствовать корректирующая система. Только в этом случае можно обезопасить себя и других участников дорожного движения. К тому же, специальные корректирующие приборы дают полную гарантию, что все дорожные знаки и разметка будут ясно видны. В то же время яркие и мощные фары не будут служить причиной ослепления других водителей.
Историческая справка
Корректорами фар оснащаются не только современные автомобили, в истории были случаи использования подобной системы несколько десятилетий назад. В далекие 1950-е годы такие приборы ставились лишь на дорогие марки автомобилей. В то время регулировка фар производилась ручным способом, за что отвечал специальный целый механический привод. Статический регулятор освещения (так ранее называлось некое подобие автокорректора фар) устанавливался непосредственно в фары, а их регулировка производилась перед каждой поездкой.
С тех пор технология постоянно совершенствовалась, и в 1970-е годы появилась возможность регулировать фары с водительского места. Это осуществлялось посредством разных приводов:
- гидравлических;
- вакуумных;
- электрических;
- пневматических и прочих.
Однако эти приспособления быстро утратили свою актуальность, поскольку водителям было сложно определить необходимое направление светового потока. В особенности трудности возникали в случае загруженности автомобиля. Со временем регулировка фар стала производиться автоматикой.
Принцип действия и разновидности корректора фар
В систему коррекции фар включен датчик наклона автомобиля, устанавливаемый в его задней части. В его обязанности входит определение высоты относительно дороги, расчет угла наклона и передача всей информации в блок управления. Основываясь на этих сведениях, контролер автокорректора фар для ксенона принимает соответствующие решения. То есть при необходимости сигнал от компьютера меняет угол светового потока в нужном направлении, за что отвечает корректор.
Практически каждый современный автомобиль оснащается системой корректировки фар. Она подразделяется на два типа:
- квазистатический;
- динамический.
Между этими системами есть существенные различия, и работа одной из них более быстра и безопасна. Стоит более подробно рассмотреть, на чем основывается их принцип работы.
Квазистатические корректоры
В состав квазистатического устройства входят следующие компоненты:
- сенсор положения кузова автомобиля (в количестве двух штук);
- приводной механизм (в каждой фаре);
- переключатель коррекции фар (для ручной настройки).
Датчики связаны с осями авто посредством специальных тяг. Также сюда можно включить блок управления. Принцип работы данной системы основывается на изменении угла наклона кузова, что происходит при загруженности или движении на высокой скорости. К сожалению, установка автокорректора фар подобного типа не совсем рациональна, так как время реагирования датчиков оставляет желать лучшего. Эффективность работы автокорректора повышается установкой переключателя на приборную панель для ручной регулировки фар.
Если задействован автоматический режим, то регулировка происходит с участием блока управления. Для этого контроллер получает и обрабатывает все сведения касательно расположения кузова и скорости автомобиля. Данные угла наклона ему направляют указанные сенсоры, а информацию о скорости он получает от датчиков АБС.
Динамические корректоры
Своим появлением динамические автокорректоры фар обязаны массовым переходом на ксеноновые источники освещения. Связано это главным образом с тем, что мощный световой поток от ксенона более опасен, чем свет от галогенных аналогов. Даже кратковременная яркая вспышка приведет к ослеплению водителя встречного автомобиля и возникновению ДТП. Поэтому жизненно необходима регулировка фар. Автокорректор справится с этим делом наилучшим образом.

Главное отличие данной системы от рассматриваемой выше заключается в том, что она намного быстрее реагирует на изменение угла наклона, скорости высоты транспорта. Времени уходит очень мало – какие-то доли секунды. То есть делает это она практически мгновенно, что очень важно при использовании ксеноновых фар.
Благодаря динамическому корректору световой поток будет всегда оставаться на заданном уровне в любой ситуации движения автомобиля:
- разгон;
- прохождение поворотов;
- торможение;
- движение по неровной дороге.
Таким образом, насколько бы яркими ни были лампы, для всех остальных водителей они полностью безопасны.
Самостоятельная установка
Для установки автокорректора можно воспользоваться услугами работников СТО или выполнить всю работу самостоятельно. Как правило, если принимается решение установить автокорректор фар своими руками, на автомобиле, возможно, уже установлено устройство. Поэтому предварительно стоит оценить его работу. И при необходимости все же заменить штатный гидрокорректор другим прибором, стоит предварительно его демонтировать.
Многие водители отдают предпочтение именно электромеханическим автокорректорам в силу относительно недорогой цены. Если стандартный прибор вышел из строя, то это будет отличная альтернатива.
Снятия штатной системы
Демонтаж штатного гидрокорректора начинается с перекусывания трубопроводов и слива из них жидкости. Обычно они располагаются недалеко от аккумуляторной батареи. После этого следует операция снятия главного рабочего цилиндра. Для этого понадобится отвертка, которой нужно прижать защелку, фиксирующую корпус цилиндра. Чтобы его вытащить, для начала корпус поворачивается против часовой стрелки до упора и потянуть на себя.

На следующем этапе установки автокорректора фар можно переходить в салон, чтобы снять ручку с блока гидрокорректора, удерживаемую гайкой. А после того как блок управления будет снят вместе с трубопроводами, можно переходить к демонтажу резиновой пробки-заглушки моторного щита.
После этого остается подготовить электропроводку, выбрав провода необходимого сечения и длины. С одного края проводки нужно припаять клеммы к колодке подключения блока управления. После этого провода прокладываются через отверстие моторного щита там, где ранее был трубопровод. Другой край проводов припаять к колодке подключения приводов. Обычно в комплектации автокорректора к колодкам предусмотрены резиновые защитные чехлы. Но в их отсутствии можно использовать герметик либо термоусадочные трубки.
Для питания предусмотрены два толстых провода и клеммы вида «мама» в количестве 4 штук (одна из них широкая, а другие три узкие). Автокорректор фар работает эффективно в случае поступления питания с включением ближнего света фар. Для этого следует подключиться к:
- клемме №10;
- выключателю №64;
- блоку питания задней противотуманки.
Массу можно соединить при помощи свободной клеммы провода, идущего к реле зажигания. После чего установить приводы на штатное месторасположение и зафиксировать прокладками.
Универсальный вариант
Существует универсальный прибор, который производит немецкая компания Hella. Устройство можно установить на любой автомобиль, причем оно может выступать в роли самостоятельной системы или быть дополнением к ручной регулировке фар.
Принцип работы основывается на показаниях новейших ультразвуковых сенсоров, которые закрепляются в нижней части кузова на расстоянии не менее 25 см от дороги. С датчиков блок управления принимает необходимые сведения касательно величины угла наклона кузова автомобиля.
Произведя необходимые вычисления, блок управления посылает управляющие сигналы электроприводам автокорректора фар Hella. Они, в свою очередь, в зависимости от ситуации меняют направление светового потока.

Начиная с 2010 года машины, оснащенные ксеноновыми фарами должны иметь в обязательном порядке автокорректор, который выравнивает установочный угол фары так, чтобы исходящий свет падал горизонтально дороге и не слепил водителей встречной полосы. Особенностью такого устройства является автоматическая корректировка направления светового луча при изменении положения автомобиля на подъеме, спуске или неравномерной загрузке.
Принцип действия автокорректора
Для правильного использования корректора в задней части транспортного средства устанавливается датчик, определяющий его угол наклона, после чего информация фиксируется в блоке управления и ток дает сигнал на поворот фар в том или ином направлении.
Пример: на заднем сидении автомобиля сидят пассажиры или багажник слишком загружен, при этом часть машины заметно проседает. В этом случае свет фар устремлен вверх, что приводит к плохому освещению в темный период времени и в непогоду. При таком положении машины датчик фиксирует изменения, а корректор выравнивает фары так, чтобы свет шел горизонтально, независимо от просадки кузова. Такие действия автокорректора происходят автоматически и совершенно незаметно.
Корректоры фар производятся по принципу конструктивной особенности и принципу работы, и подразделяются на квазистатические и динамические.
- Квазистатический корректор, принцип действия которого основан на изменении установленного угла фар при наклоне кузова, состоит из двух датчиков, фиксирующих положение рамы, исполнительных механизмов, электронного блока управления и клавиш переключения при ручной коррекции.
- Динамический корректор является аналогом квазистатического с единственным отличием: присутствие электроники как в блоке управления, так и в исполнительных регуляторах. Такое устройство обеспечивает мгновенное реагирование угла наклона фары при изменении положения кузова и производится такая корректировка даже при минимальных отклонениях.
Установка автокорректора

Цены на приобретение и установку системы коррекции фар в сервисных центрах варьируются, и при этом не всегда по карману. Поэтому есть вариант соорудить и установить конструкцию своими руками. Динамический вариант корректора в домашних условиях изготовить нельзя, но вполне реально сделать электромеханическую конструкцию.
Такой автокорректор работает на моторедукторах, установленных в каждой фаре и блоке управления, которые можно вполне свободно и недорого приобрести на любом авторынке. Дополнительно понадобятся провода и крепежи, колодки и клеммы, кембрик, паяльник и изоляция.
Выбирать комплектующие необходимо соответственно габаритам штатного корректора и устанавливать в предусмотренное для этого место заводом-изготовителем. Для этого нужно провести демонтаж сломанного устройства.
Порядок установки автокорректора фар:

Если все же автокорректор приобретается отдельно, то, как правило, бывает укомплектован датчиками, электроблоком управления, проводкой и приводными устройствами, что позволяет без особого труда установить корректор на конкретную машину. Автолюбители отмечают в основном 2 фирмы, специализирующиеся на производстве автокорректоров фар – это Hella и SmartEye.
- Автокорректоры от немецкой компании Hella можно устанавливать на любую марку машины. Есть вариант использования устройства как в дополнение к ручному корректору, так и как самостоятельный девайс с возможностью использования как ручного, так и автоматического режима. С помощью инструкции установка производится своими руками довольно просто.
- Автокорректоры от SmartEye являются дополнительной опцией при переоборудовании штатных электромеханических систем. Принцип действия заключается лишь в определении положения кузова к плоскости дороги, тем самым изменяя угол наклона фар.
Автокорректор фар является неотъемлемой и обязательной составляющей транспортного средства, особенно оснащенного ксеноновыми лампами. За счет этого модуля решается ряд важных задач водителя: безопасность движения в темное время суток и в плохую погоду, правильное освещение при неравномерной загруженности автомобиля, сглаживание негативного влияния ксенона на водителей встречного транспорта, беспрепятственное прохождение ТО. Правильный свет автомобиля – залог комфорта и безопасности на дорогах.
Не так давно в своем БЖ я размещал запись "Установка омывателя фар Hella", и упоминал, что совместил подключение омывателя фар на кнопку в салоне с еще одной полезной установкой.
Омыватель фар я тогда решил установить спонтанно, в совокупности с другими необходимыми работами, требующими снятия бампера. Так получилось, что и решение поставить автокорректор фар все-таки родилось так же — когда просто увидел подходящее для установки место :) Хотя, мысли и желание установить появились еще пару лет назад. Лень было. Руки не доходили. Времени не было))
Углубляясь в вопрос выбора автоматического корректора фар, видим на рынке следующие варианты…
— Автоматический корректор фар Hella
Этот вариант отличается своей ценой (как и у всего зарубежного и именитого, он далеко не всем по карману, мягко говоря). А также сомнения вызывают ультразвуковые датчики. Уже если датчики парктроника нуждаются в постоянном внимании, особенно весной\осенью в связи с постоянной грязью, а зимой — с наледью, то что же будет с подобными датчиками под днищем автомобиля? Думаю, этот вариант для чистых европейских дорог и толстых буржуйских кошельков :)
— Китайские варианты
Не знаю точно, продаются ли они до сих пор, припоминается несколько разновидностей — в т.ч. Smart Eye, и подобные. У них одна общая особенность, помимо хваленого и всем известного китайского качества — в роли датчика используется акселерометр. Такие же присутствуют в современных смартфонах, планшетах и прочей подобной технике. Датчик лепится на двусторонний скотч в багажнике. Ох уж и любят китайцы все свои недоделки гаджеты крепить только на него))
Тут дураку понятно, что датчик будет сходить с ума на всех горках, на спусках, задирать-опускать фары в самые неподходящие моменты, и вообще вести себя непредсказуемо. Короче говоря, этот вариант тоже не для нас)
Как я уже говорил, мысль об установке автокорректора пришла, когда я выбирал место для кнопки. Выбрав, нашел место и для автокорректора. Так как комплектация у меня самая обычная — Classic, слева от руля у меня только "крутилка" электрокорректора, а никаких регуляторов подсветки, кнопок есп и прочего нет. Вот прямо справа от ручного корректора я и решил ставить кнопку — заодно и взять питание с питания регулятора угла наклона фар.
…А раз я буду врезаться в проводку штатного корректора, почему бы не совместить это с установкой блока управления автокорректора Зенит? Правильно, надо совместить.
Пока что установил только блок управления, датчик также буду устанавливать, как появится возможность помыть днище автомобиля, доехать чистым до ямы и не замерзнуть при установке))
Изначально блок Силича представляет собой плату, размещенную в пластиковый корпус и залитую герметиком. Предполагается, что все необходимые провода будут подключаться к блоку с помощью зажимных контактов, размещенных на плате.
Но так как места для установки у меня не очень много…
Было решено внести некоторые изменения во внешний вид устройства, чтобы все влезло и не занимало много места.
Никому не рекомендую разбирать\перепаивать\ломать приобретенное устройство, так как любое самостоятельное вмешательство в целостность устройства повлечет потерю официальной гарантии.
Не буду рассказывать, что и как было сделано, расскажу и покажу лишь то, что получилось.
Плата была извлечена из корпуса, а разъемы были заменены проводами. Пришлось добавить пару перемычек между контактами разъема, поэтому еще раз повторяюсь — ни в коем случае не советую повторять) может не заработать).
Габариты устройства моментально уменьшились, появилась возможность запихнуть установить плату в подходящее место, выведя провода из платы наружу.
Изучив схему подключения с сайта производителя, видим следующее: для подключения блока нам понадобится четыре провода:
1)Питание +12в
2)Масса
3)Сигнал от ручного корректора
4)Сигнал на электромоторы в фарах
Для подключения датчика — еще три — масса датчика, сигнал датчика, питание датчика. Эти три провода я так же вывел с платы и заизолировал, так как пока поставил блок управления автокорректором, без датчика. После установки датчика, нужно будет лишь соединить эти три провода с кабелем датчика задней оси (в нем также три провода).
Проведя некоторые манипуляции дремелем, плата отлично поместилась в корпус заглушки кнопки, с уже установленной кнопкой омывателя фар.
Зафиксировал все это дело герметиком — он пластичен, выполнит как фиксирующую задачу, так и задачу сохранения платы от возможных физических повреждений при тряске.
Теперь с подключением устройства к ручному корректору фар. Смотрим на разъем и провода, подходящие в ручной крутилке в салоне. С помощью схемы определяем, какой цвет за что отвечает.
Нам понадобятся:
1)Желтый провод — подсветка (то есть питание на него приходит лишь при включении габаритов) — Здесь аккуратнее, если у вас есть регулировка яркости подсветки панели, этот вариант вам не подойдет.
2)Черный провод (полностью черный, без полоски) — масса.
3)Синий провод — сигнал на электромоторы в фарах.
С желтого провода (читай выше, подходит не для всех. Советовал бы взять питание с плюса, появляющегося при включении ближнего. Но фары у нас включаются массой, так что смотрите по своей схеме) берем питание автокорректора, я с него же взял еще питание для кнопки омывателя фар.
С черного провода берем массу, тут все просто. Можно взять с кузова, кому как удобно.
С синим проводом внимательнее: его разрезаем. получаем конец провода со стороны разъема (ручной крутилки) и конец со стороны жгута проводов. Конец со стороны разъема подключаем, как сигнал от ручного электрокорректора. Конец со стороны жгута проводов подключаем, как сигнал управления моторедукторами.
Остается еще подключение сигнала от датчика скорости (чтобы фары "не гуляли" во время движения, как у китайских аналогов — его можно подключить к OBD разъему. Я пока этот провод заизолировал, не подключая.
Подключить СиличЪ-Зенит решил через разъем, чтобы можно было при необходимости отключить\отсоединить.
К разъему ручного электрокорректора посредством скруток, был добавлен пятиконтактный разъем "мама", к блоку управления автокорректора Зенит — разъем "папа".
Красный провод с тонким разъемом — это контакт омывателя фар, а три коротких заизолированных провода — провода для будущего подключения датчика загрузки задней оси. Все остальные необходимые провода — в разъеме. Как видно, их не так уж и много. Дольше с разъемом возился — обжимал и т.д.
Когда у Вас стоит ксенон и Вы начинаете замечать, что фары светят нитуда куда надо, наприме при загрузке багажника, после каждой заправки, или если посадить сзади двух человек. То материалы ниже для Вас.
На моем виндуме предхоз поставил ксеноновые фары. Когда машину у него забирал, он дал в руки регулятор-крутилку и говорит что осталось только кинуть проводку от регулятора до фар — и все. Я обрадовался конечно.
Оказалось "кинуть проводку" проканывает только у калдин, спринтеров и других машин без автокорректора. Понятно, да? уже не все так просто. =) На кволисах, виндумах устанавливался автокооректор. Кроме проводов там есть блок управления и резистор, соединенный с задней поперечной тягой, определящий положение кузова. Поиски блока управления по каталогам, японскому сервис-мануалу (был куплен спец-диск) провалились.
Сам шаговый мотор выглядит вот так
Он "тянет" на себя отражатель — фары светят наверх, или наоборот "выталкивает" — фары светят вниз.
В самом начале поисков наткнулся на пост. Парень собрал корректор для Camry на основе PIC-контроллера… я у него выпросил ссылку на проект в Proteus и исходники прошивки. После на некоторое время забросил это дело… Когда решил начать, не было ни мужика, ни камрюхи, ни переписки, ничего…
Вырисовались задачи:
1. Девайс должен из себя представлять коробочку, могущую быть запиханной под бардачок.
2. Управление шаговыми двигателями с помощью ARDUINO
3. Подружить ARDUINO c регулятором положения фар
4. Подружить ARDUINO c шаговыми двигателями
Регулятор положения фар
Регулятор положения фар выглядил вот так
Удалось найти точку где напряжение менялось в соотвествии с измененем положения крутилки и при этом оно НЕ ЗАВИСИЛО от напряжения питания. Подпоялся к ней.
Блок-схема получилась такая
Управление шаговыми двигателями
Самый простой способ управлять шаговыми двигателями посредсвам микроконтроллера — использовать специальный драйвер. Пошел сложным путем. И вот что получилось в PROTEUS:
Cхема нарисована плохо, весьма тяжеко давалась работа в этом софте.
за основу взял вот эту
Седрцем корректора стал микроконтроллер ATMEL AVR на плате Arduino NANO. Питание на моторы подавалось мосфет транзисторами. Крутилка-регулятор и +12V подсветки салона были подключены через оптроны. После сборке ввиду наличия делителя напряжения нужно откалибровать положения регулятора и показаний АЦП контроллера в программном коде.
Плата делалась методом ЛУТ (Лазерно-утяжковая технология)
После установки компонент и накатывания прошивки проверил работу
const int ledPin = 13; // назначаем пин для светодиода, расположенного на плате Arduiono NANO//
// создаем пины для первого мотороа
const int pinD1_1=3;
const int pinD1_2=4;
const int pinD1_3=5;
const int pinD1_4=6;
// создаем пины для второго мотороа
const int pinD2_1=7;
const int pinD2_2=8;
const int pinD2_3=9;
const int pinD2_4=10;
const int pinDL=11; // пин для включения реле ДХО "Day Light"
const int pinSLOn=2; // пин для понимания включены ли фары или нет. при включении фар на этот пин будет подваться примерно 5В
const int pinReg=6; //пин для подключения регулятора. регулятор будет подключен к аналоговому входу.
long cycle=0; //счетсчик циклов функции loop (). сколько раз была повторена функция loop ()
long ncycle=0; // количество повторений функции loop () при которых мы двигали мотор
int maxncycle=4; //максимальное количество повторений функции loop () при которых мы двигаем мотор
long pr1regPos=0; //значение переменной regPos на предыдущем шаге
long pr2regPos=0; //значение переменной regPos на предыдущем предыдущего шаге
long nloopcycle=8200; //количество шагов в петле
const long steprange=480; // рабочая область шагов. максимальное количество шагов, на которое может переместится двигатель//
AccelStepper stepperD1(8, pinD1_1, pinD1_2, pinD1_3, pinD1_4); //инициализируем объект stepperD1 (класса AccelStepper), который будет первым мотором
AccelStepper stepperD2(8, pinD2_1, pinD2_2, pinD2_3, pinD2_4); //инициализируем объект stepperD2 (класса AccelStepper), который будет вторым мотором
// калибровка //
//функция необходима для установки моторов//
//в крайнее положение, которое затем приравниваем к нулевому//
void tagetToZero ()
<
digitalWrite( ledPin, HIGH);
stepperD1.enableOutputs(); //включим выводы (в этом месте они не бывают выключены.на всякий пожарный оставим эти две строки тут
stepperD2.enableOutputs();
stepperD1.moveTo (steprange); // поворачиваем первый двигатель в одну из сторон. он упрется в конечное положение, прощелкает остаток и остановится
stepperD2.moveTo (steprange); // поворачиваем второй двигатель в одну из сторон.
while ((stepperD1.distanceToGo() != 0)||(stepperD2.distanceToGo() != 0)) // ждем пока доедет до конца. а он полюбас доедет. контроллеру пофигу на на то что вал не крутится, а сигналы подаются.
<
stepperD1.run(); // поворачиваем первый двигатель в одну из сторон. он упрется в конечное положение, прощелкает остаток и остановится
stepperD2.run(); // поворачиваем второй двигатель в одну из сторон.
>
digitalWrite( ledPin, LOW);
>
// конец калибровки //
// включаем выключаем фары изходя из состояния пина pinSLOn //
void dayLight ()
<
int salLiht=LOW; // инициализируем локальную переменную (переменная видна только внутри этой функции. ее значение при этом обнуляется
salLiht=digitalRead(pinSLOn); //читаем какой уровень сигнала у нас находится на ноге pinSLOn
if (salLiht==HIGH) //если высокий, то пора выключить огни!
<
digitalWrite( pinDL, LOW); // т.е. если уровень на входной ноге pinSLOn высокий, то подаем низкий уровень на ногу pinDL, тем самым выключая реле ДХО. если оно выключено, то ничего не проихойдет.
> else digitalWrite( pinDL, HIGH); //иначе включаем ДХО подачей высокого уровня на ногу pinDL.
long readregU (int numofstep) // с помощью этой функции считываем и усредняем по времени текущее напряжение на пине pinReg
<
// numofstep — количество считываний напряжения
int crstep=0; //обнуляем счетчик шагов
long summofU=0;
long regU;
while ( crstep<numofstep) //будем считывать regU numofstep раз
<
int regU = analogRead(pinReg);
delay(1);
crstep++;
summofU=summofU+regU;
>
regU=summofU/numofstep;
return regU;
>
void setup() <
delay (8000); //нифига не делаем 8 секунд, за это время можно например успеть люк закрыть.
pinMode(pinDL, OUTPUT); //реле мы управляем по средсвам этого пина
pinMode(pinSLOn, INPUT); // по состоянию этого пина мы срашиваем включены ли фары.
stepperD1.setMaxSpeed(320); // Скорость вращения вала двигателя.
stepperD1.setAcceleration(700); // Темп разгона-торможения двигателя.
stepperD2.setMaxSpeed(250); // Скорость вращения вала двигателя.
stepperD2.setAcceleration(800); // Темп разгона-торможения двигателя
digitalWrite( pinDL, LOW); //дневные ходовые огни мы включим чуть апосля, а в момент инициализации контроллера пускай они будут выключены
tagetToZero ();//установим фары в крайнее положение
stepperD1.setCurrentPosition(0); // устанавливаем это положение первого двигателя как нулевое
stepperD2.setCurrentPosition(0); // устанавливаем это положение второго двигателя как нулевое
stepperD1.disableOutputs();
stepperD2.disableOutputs();
>
void loop()
<
if (cycle>nloopcycle) //делал интуитивно, как работает сам не понял. но оно работает! если кто-то придумает как исключить "теребоньканья" мотора при установки регулятора между дискретными позициями в неустнойчивом положении, буду благодарен.
<
cycle=0; ncycle=0;
>
else cycle++;
dayLight (); // мы можем включить ДХО если не включены фары. а если фары включены, ДХО выключится. все сделает эта функция. мы ее будем переодически вызывать.
int regPos=0;
int regU=0;
int salLiht=LOW; // инициализируем локальную переменную (видно только внутри этой функции. ее значение при этом обнуляется
salLiht=digitalRead(pinSLOn); //читаем какой уровень сигнала у нас находится на ноге pinSLOn
if (salLiht==HIGH) //если высокий, значит фары включены и необходимо установить моторы в нужное положение
<
digitalWrite( ledPin, HIGH);
regU=readregU(12); // читаем значение напряжения на ноге pinReg и записываем в переменную regU
//соотносим значение напряжения regU с положением регулятора
if ((regU<=47)&&(regU>20)) regPos=10;
if ((regU<=82)&&(regU>47)) regPos=9;
if ((regU<=126)&&(regU>82)) regPos=8;
if ((regU<=180)&&(regU>126)) regPos=7;
if ((regU<=248)&&(regU>180)) regPos=6;
if ((regU<=314)&&(regU>248)) regPos=5;
if ((regU<=437)&&(regU>314)) regPos=4;
if ((regU<=564)&&(regU>437)) regPos=3;
if ((regU<=717)&&(regU>564)) regPos=2;
if ((regU<=845)&&(regU>717)) regPos=1;
if ((regU<=950)&&(regU>845)) regPos=0;
if ((regU<=15)&&(regU>=0)) regPos=5; // на случай если выдернуть регулятор из фишки, моторы будут установлены в среднее положение
if ((regU<1024)&&(regU>950)) regPos=5;// на случай если что-то перемкнет, моторы переместим в среднее положение
long gotoposition=-(steprange/11)*regPos;
if ((pr2regPos==regPos)&&(ncycle>maxncycle))
<
>
else
<
if (gotoposition != stepperD1.currentPosition () )
<
if (pr2regPos==regPos) ncycle++; //когда мы переместились вперед-назад на один шаг, увеличивается значение этого счетчика.
pr2regPos=pr1regPos; //значение положения регулятора, которое было 2 шага назад, приравнивается к значению 1 шага назад.
pr1regPos=regPos; //а положение регулятора которое было 1 шаг назад, приравинваниется к положению регулятора в данный момент
stepperD1.enableOutputs();
stepperD2.enableOutputs();
stepperD1.moveTo(gotoposition); // поворачиваем первый двигатель в одну из сторон. он упрется в конечное положение, прощелкает остаток и остановится
stepperD2.moveTo(gotoposition); // поворачиваем второй двигатель в одну из сторон.
while (stepperD1.distanceToGo() != 0) // ждем пока доедет до конца. а он полюбас доедет. контроллеру пофигу на на то что вал не крутится, а сигналы подаются.
<
stepperD1.run();
stepperD2.run();
>
digitalWrite( ledPin, LOW );
stepperD1.disableOutputs();
stepperD2.disableOutputs();
>
==============================================================================
Две последнии строки крайне необходимы. Удерживать мотор в каждом положении нам не нужно, так как он сам прекрасно держатся на месте, рукой не сдвинешь. Жрать в холостую целый апер — это жирновато. Плюс будет существенный нагрев моторов и транзисторов…Увеличим энтропию вселенной, приблизим тепловую смерть вселенной. Поэтому выключаем выводы строками:
stepperD1.disableOutputs();
stepperD2.disableOutputs();
Исходный код и проект платы в Proteus отправлю нуждающимся на почту, пишите в личку.
Читайте также: