
Тахометр lcd 50 9999 rpm инструкция
Тахометр состоит из двух частей — основной платы и датчика оборотов. Электрическая схема контроллера показана на рисунке ниже. Работой тахометра управляет микроконтроллер ATmega8 , работающий от внутреннего генератора с частотой 1 МГц. Это настройка ATmega8 по умолчанию, поэтому нет необходимости изменять фьюзы.
Питание схемы осуществляется от источника питания с постоянным напряжением 8…12 В. Стабилизатор напряжение DA1 (78l05) обеспечивает 5 В, а конденсаторы C2…C5 фильтруют линию питания.
Сигнал от датчика, возникающий в результате реакции фототранзистора на отраженный свет светодиода, подается на вход внешнего прерывания INT0 микроконтроллера (вывод 4).
Программное обеспечение использует TIMER1 для генерации прерываний каждую секунду. Число оборотов подсчитывается с помощью прерывания INT0 между каждым прерыванием TIMER1. Таким образом, на дисплее (16×2) отображается результат измерения в оборотах в секунду (RPS), а результат в оборотах в минуту (RPM) вычисляется путем умножения показаний RPS на 60.

На вращающемся объекте следует наклеить белую наклейку или нарисовать белую точку, чтобы световой луч светодиода легче отражался и мог быть легко обнаружен фототранзистором. Чувствительность и, следовательно, расстояние от измеряемого объекта может быть установлено с помощью потенциометра.
Тахометр представляет собой устройство, которое используется для измерения количества оборотов объекта в заданном интервале времени. Обычно значение выражается в оборотах в минуту или об/мин. Ранее тахометры были чисто механическими устройствами, в которых вращение передавалось в тахометр через механическое соединение (трос или вал), количество оборотов в минуту определялось с помощью зубчатой передачи и отображалось на круговой шкале. После прихода современной электроники тахометры очень сильно изменились. Данная статья описывает бесконтактный цифровой тахометр на базе Arduino. Скорость двигателя также может контролироваться с помощью аналогичной схемы. Количество оборотов в минуту и другая информация отображается на жидкокристаллическом дисплее размером 16×2. Электрическая схема цифрового тахометра на базе Arduino показана ниже.
Электрическая схема
Датчик оборотов в минуту
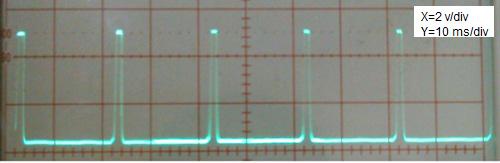
Инфракрасный фототранзистор и инфракрасный светодиод образуют датчик. Инфракрасный фототранзистор – это тип фототранзистора, который реагирует только на инфракрасные волны. Использование инфракрасного фототранзистора позволяет избежать влияния других интерференций света из окружающей среды. Фототранзистор и инфракрасный светодиод расположены параллельно. Резистор R2 ограничивает ток через инфракрасный диод. Отражательная направляющая лента приклеена на вращающийся объект (вал, диск или вентилятор) на одной линии с датчиком. Я использовал охлаждающий вентилятор с напряжением питания 9В/100мА. Зазор между датчиком и отражательной направляющей лентой должен не превышать 1см. Когда отражательная направляющая лента проходит перед датчиком, инфракрасные волны отражаются назад к фототранзистору. Фототранзистор проводит больше в данный момент и в результате напряжение через R3(68K резистор) стремительно поднимается. Результатом будет сигнал, форма которого показана ниже на эмиттере фототранзистора. Количество оборотов в минуту может быть определено путем вычисления количества восходящих импульсов в заданный интервал времени.
Вычисление количества оборотов в минуту
Arduino используется для вычисления величины оборотов в минуту и отображения этой величины на жидкокристаллическом дисплее. Эмиттер фототранзистора соединен с выводом Interrupt 0 (цифровой вывод 2) Arduino. Прерывание Arduino конфигурируется по инициируемому нарастающему фронту. В результате обрабатывается прерывание для каждого восходящего импульса в форме сигнала эмиттера. Количество полученных прерываний в заданное время вычисляется по приращению переменной, посредством программы обслуживания прерываний. Время, прошедшее в течение вычислительного цикла, определяется с помощью функции millis(). Функция millis() возвращает количество мили секунд, прошедших после включения платы Arduino. Вызов функции millis() до и после вычислительного цикла и вычисление их разницы дает время, прошедшее в течение вычислительного цикла. Величина (количество прерываний/раз в миллисекунду)*60000 определит количество оборотов в минуту (об/мин).
Контроль скорости двигателя
Устройство для контроля скорости двигателя с помощью потенциометра также включено в схему. Транзистор Q1 используется для управления двигателем. Его база подсоединена к ШИМ выводу 9 Arduino через токоограничивающий резистор R1. Движок потенциометра контроля скорости R4 подсоединен к аналоговому выводу A0 Arduino. Напряжение на этом выводе преобразуется в значение между 0 и 1023 посредством функции anlogRead. Затем это значение делится на четыре, чтобы попасть в диапазон от 0 до 255. После этого данное значение записывается в ШИМ вывод 9 с помощью функции anlogWrite. В результате на выводе 9 будет прямоугольная волна, чей коэффициент заполнения пропорционален величине, записанной с помощью функции analogWrite. Например, если величина равна 255, коэффициент заполнения будет 100%, а если величина равна 127, коэффициент заполнения будет около 50%. D1 – это обратный диод, а C1 – это шумоподавляющий конденсатор (декаплер). Количество оборотов в минуту и коэффициент заполнения отображаются на экране жидкокристаллического дисплея с помощью стандартной библиотеки LiquidCrystal. Прочтите вот эту статью: Интерфейсный жидкокристаллический дисплей для Arduino. Полный программный код для цифрового тахометра на базе Arduino показан ниже.
Программный код
Примечания
• На плату Arduino можно подать напряжение питания 9В через внешнее гнездо питания.
• Напряжение 5В, необходимое для некоторых компонентов схемы, может быть подано от 5В источника на плате Arduino.
• Используемый вентилятор использует напряжение 9В/100мА. Транзистор 2N2222 может выдержать ток только до 800мА. Помните об этом при выборе нагрузки.
• Используемый жидкокристаллический дисплей — JHD162A.
• Потенциометр R5 может использоваться для регулировки контрастности жидкокристаллического дисплея. При его подсоединении на дисплее не будет ничего отображаться. Выполните регулировку R5, пока на дисплее не появится изображение. Оптимальное напряжение на движке потенциометра R5 находится в пределах от 0.4 до 1В.
• Инфракрасный фототранзистор и инфракрасный диод были вынуты из фото прерывающего модуля LTH-1550.
• Боковую поверхность фототранзистора необходимо закрыть с помощью изоленты.
• Положение датчика показано на рисунке ниже.
Если дома есть Arduino, в гараже машина или мотоцикл, а то и хоть мотособака, в голове туманные представления о программировании — возникает желание измерить скорость движения или обороты двигателя, посчитать пробег и моточасы.
В данной статье я хочу поделиться своим опытом по изготовлению подобных поделок.

Немного физики
Для измерения частоты вращения нам понадобится датчик положения колеса/вала/круга/итп. Датчик ставится как правило один. Возможно, что он будет срабатывать не один раз на каждый оборот. Например, у вас датчик Холла и 4 магнита на колесе. Таким образом, для правильного вычисления частоты нужно знать:
- количество срабатываний датчика на один оборот К;
- минимальная ожидаемая частота Мин.
- максимальная ожидаемая частота Макс.
То есть, если частота меньше разумного минимума, то считаем, что она равна нулю, если больше максимума — игнорируем показания.
С количеством срабатываний понятно, но зачем ещё эти мины и максы? Давайте рассмотрим сначала варианты расчёта частоты.
Со скоростью всё проще, достаточно знать число π, диаметр колеса, а частоту вращения мы уже знаем.
Болванка для кода
Так как мы имеем дело с такими нежными величинами как время и пространство, то лучше сразу освоить прерывания.
Обратите внимание на модификатор volatile у переменной counter. Все переменные, которые будут изменяться в обработчике прерывания (ISR) должны быть volatile. Это слово говорит компилятору, что переменная может изменяться неожиданно и доступ к ней нельзя оптимизировать.
Функция ISR() вызывается каждый раз, когда появляется единица на ноге fqPin. Мы эту функцию не вызываем, это делает сам контроллер. Он это делает, даже когда основная программа стоит в ступоре на функции delay(). Считайте, что ISR() обслуживает событие, от вас не зависящее и данное вам свыше как setup() и loop(). Контроллер прерывает выполнение вашей программы, выполняет ISR() и возвращается обратно в ту же точку, где прерывал.
Тело функции ISR() должно быть максимально коротким, точнее, сама функция должна выполняться максимально быстро. Это важно, так как прерывается выполнение вашего кода, который может оказаться чувствительным к непредвиденным задержкам. Некоторые библиотеки отключают прерывания для выполнения чувствительных с задержкам операций, например для управления светодиодной лентой WS2812.
Считаем обороты за единицу времени.
Первое, что приходит в голову, это взять интервал времени и посчитать количество измерений.
Как и у многих простых решений, у этого есть неочевидные минусы. Для повышения точности измерений вам необходим довольно большой интервал времени. Принцип тот же, что и у Шума квантования. При времени оборота колеса сравнимом с временем подсчёта, существенные изменения скорости вращения не будут замечены. Показания такого частотомера будут различаться до двух раз на каждый отсчёт.
Для повышени точности на малой скорости можно увеличить число К, как это сделано, скажем, в автомобильной технике для датчика ABS. Можно увеличить время подсчёта. Делая и то и другое мы подходим ко второй проблеме — переполнению счётчика. Да, переполнение легко лечится увеличением количества бит, но арифметика процессора Arduino не умеет считать 64-битные числа столь быстро, как хотелось бы и как она это делает с 16-разрядными.
Увеличение времени расчёта тоже не очень хорошо тк нам надо знать частоту прямо сейчас, вот при нажатии на газ, а не через пару секунд. Да и через пару секунд мы получим скорее некое среднее значение. За это время можно несколько раз сделать врумм-врумм.
Есть другой метод. Он лишён вышеописанных недостатков, но, как водится, имеет свои.
Считаем интервал между отсчётами
Мы можем засечь время одного отсчёта и другого, вычислить разницу. Величина, обратная вычисленному интервалу и есть частота. Круто! Но есть минусы.
Что делать, если наше колесо крутится еле-еле и измеренный интервал превышает разумные пределы? Выше я предложил считать частоты ниже разумного минимума за ноль.
Определённым недостатком метода можно считать шумы квантования на высоких частотах, когда целочисленный интервал снижается до нескольких двоичных разрядов.
Так же хотелось бы некую статистику подсчётов для улучшения показаний, а мы берём лишь последнее значение.
Методом проб и ошибок я подобрал интервал отображения данных на дисплее в 250мс как оптимальный. Если чаще, то цифры размазываются, если реже — бесит тормознутость.
Комбинированный метод
Можно попробовать объединить достоинства обоих методов.
То есть, мы засекаем время не просто между отсчётами, а время между проверками данных и делим на количество отсчётов за это время. Получается усреднённый интервал между отсчётами, обратная величина от которого есть частота. Предоставим компилятору оптимизировать вычисления.
Обратите внимание, что за интервал считается не время опроса, как в первом примере, а время от последнего отсчёта до предыдущего последнего отсчёта в прошлом опросе. Это заметно поднимает точность вычисления.
Таким образом, мы можем получать вполне достоверные данные как на низких так и на высоких частотах.
Если использовать кооперативную многозадачнось, то можно сделать подсчёт, скажем раз 100мс, а вывод на дисплей раз в 250мс. Очень короткий интервал опроса снизит чувствительность к низким частотам.
Как говорят в рекламе, "но это ещё не всё".
Ошибки дребезга
Для устрашения вас предположу, что измеряем частоту вращения двигателя от индуктивного датчика зажигания. То есть, грубо говоря, на высоковольтный провод намотан кусок кабеля и мы измеряем индукцию в нём. Это довольно распространённый метод, не правда ли? Что же здесь сложного может быть? Самая главная проблема — современные системы зажигания, они дают не один импульс, а сразу пачку.

Но даже обычная система зажигания даёт переходные процессы:

Старинные же кулачковые контактные вообще показывают замечательные картинки.
Как с этим бороться? Частота вращения не может вырасти мгновенно, не даст инерция. Кроме того, в начале статьи я предложил ограничить частоту сверху разумными рамками. Отсчёты, что происходят слишком часто можно просто игнорировать.
Другой вид помех — это пропадание отсчётов. Из-за той же инерции у вас не может измениться частота в два раза за одну миллисекунду. Понятно, что это зависит от того, что вы собственно измеряете. Частота биения крыльев комара может, вероятно и за миллисекунду упасть до нуля.
Статистическая обработка в данном случае становится уже достаточно сложной для маленькой функции обработки прерывания и я готов обсудить варианты в комментариях.
Особенности измерения скорости движения и скорости вращения.
При измерении скорости вращения бензинового двигателя надо обязательно учесть величину К, которая совсем не очевидна. Например, вы намотали провод на кабель свечи и ожидаете, что там будет одна искра на один оборот. Это совсем не так. Во-первых, у 4-тактного двигателя вспышка происходит один раз на два оборота, у 2-тактного один раз на оборот коленвала. Во-вторых, для упрощения системы зажигания коммутатор подаёт искру на неработающие в данный момент цилиндры, типа на выпуске. Для получения правильного К надо почитать документацию на двигатель или подсмотреть показания эталонного тахометра.
При измерении скорости движения частота обновления дисплея не имеет большого значения, особенно, если вы рисуете цифры, а не двигаете стрелку. Даже обновление информации раз в секунду не вызовет отторжения. С оборотами двигателя всё наоборот, индикатор должен откликаться гораздо быстрее на изменение оборотов.
Вывод информации
Типичная обида начинающего разработчика автомобильной и мотоциклетной электроники "стрелки дёргаются, цифры нечитабельны" лечится простым способом — надо обманывать клиента. Вы что думаете, автомобильный тахометр всегда показывает вам правду? Конечно же нет! Хотя вам этот обман нравится и вы хотите, чтобы ваш прибор дурил голову так же.
Стрелки
Если включить зажигание на новом модном автомобиле или мотоцикле, стрелки приборов сделают красивый вжух до максимума и медленнее опадут до нуля. Вот! Вот это нам и надо сделать. Надо, чтобы при показе максимальной величины стрелка не метнулась к ней мгновенно и не упала как акции лохотрона в ноль.
Итак, нам надо учитывать максимальную скорость стрелки на увеличение и максимальную на уменьшение показаний. Совсем хорошо сделать эти скорости нелинейными, чтобы стрелка сначала двигалась быстрее, а потом чуть помедленнее приближалась к заданному значению.
Вот пример с нелинейным выводом показаний:
Вы можете поиграть с коэффициентами. Этот же принцип используется при выводе громкости сигнала, например, у любого аналогового индикатора: стрелки, полоски, яркость, цвет, размер итп. Приведённый пример самый простой, но и не самый красивый. Предлагайте ваши варианты в комментариях.
Цифры
С цифрами всё намного сложнее. Быстрые изменения показаний приводят к тому, что несколько порядков сливаются в мутное пятно. Для скорости, как и писал выше, можно задать интервал раз в секунду и глаз успеет прочитать три цифры.
В мототехнике не зря делают аналоговые индикаторы оборотов, точные цифры не нужны, важна относительная близость к оборотам максимального крутящего момента, к максимальным вообще и холостые.
Я предлагаю менять частоту вывода информации на дисплей в зависимости от степени изменения величины. Если обороты меняются, скажем, на 5% от последнего подсчёта, а не показа — можно затупить и показывать раз в 300-500мс. Если на 20%, то показывать раз в 100мс.
Можно огрубить шкалу и показывать только две значащие цифры
С учётом мототематики, можно довольно точно показывать обороты холостого хода как описано чуть выше и огрублять вывод на оборотах от двух холостых. На высоких оборотах для гонщиков важнее делать блинкеры типа "передачу вниз", "передачу вверх" и "ты спалишь движок". То есть держать двигатель около максимального крутящего момента и не дать ему крутиться выше максимальных разрешённых оборотов. Блинкеры замечательно делаются с помощью SmartDelay когда можно унаследовать от этого класса свой с заданной ногой контроллера и частотой мигания, там есть методы для переопределения и они вызываются раз в заданное время.
Я все хочу заменить мотор в системе отопления с коллекторного от стиральной машины на асинхронный. Чтоб тише было. Но я не знаю с какой частотой вращается вентилятор сейчас. А асинхронные двигатели нужно подбирать под частоту вращения, так как просто ее регулировать не получится - нужен частотный преобразователь.
Поэтому сваял такой девайс. Лазер светит на объект вращения, фотодиод улавливает как мигает пятно. для этого на вращающийся объект наносится контрастная метка. Дальность действия около полуметра. Есть такие девайсы и промышленного исполнения, но зачем покупать если можно сделать?
Изначально хотел сделать все из говна и палок, так как надо на один раз, но 3д принтер без дела стоит, поэтому и корпус изготовил.
Короче проект выходного дня.
Будет штук 10 фот.


Сначала обрисовывал по контуру, как бы заготовку, потом "выдалбливал внутренности" как надо. Все делалось в Solidworks, там это несложно делается. Дольше привыкать к инверсии колесика мышки ;)
Расставил подпорки где надо, крепления под все

Вот так выглядит законченная модель.

Отправляем в слайсер и печатаем. Эта картинка для того чтоб оценить внутреннюю геометрию поделки. Печатал PLA пластиком, так как это нежное говно только на такие поделки и годится.

Сам процесс печати обычный: елозит туда-сюда головка и пластиковой колбасой мажет корпус. После печати вытаскиваем, проверяем, убираем поддержки и прочую хрень.
На этой картинке все уже собрано. Дисплей у меня был, контроллер - тупо ардуина. От кроны понижающий стабилизатор, выключатель. Лазер из указки за 50 рублей (а модуль отдельно в магазе стоит 300). На нижней части корпуса - фотоприемник. Все что имеет дырки - прикручено, что не имеет - приклеено соплями Хошимина.

Логика работы прибора тупа до безобразия: лазер светит на вращающуюся часть. на ней наносим метку контрастную. Фотодиод улавливает импульсы изменения освещения. Чтоб можно было точнее настроиться на моргания есть светодиод, который моргает если прибор понимает что был импульс. И все, считаем сколько раз в секунду моргнуло, множим на 60, выводим на экран. Из органов управления только кнопка вкл-выкл. Даже обидно
Я удивился что работает хорошо, так как это это второй вариант прибора, первый был неудачным, без лазера, а просто со светодиодами, с литиевым аккумулятором, зарядкой от USB и поебал мне мозги знатно. Расстояние с которого меряет обороты - до полуметра.
Я не знаю сколько готовый стоил, этот обошелся мне рублей в 500.
у меня все, можно кидать зелени или шпалы

Плюсанул, для нечемзанятьруки сойдёт. 500 р. дорого нах, на али 300 р. На сдачу пивка бы взял.
Размещено через приложение ЯПлакалъ
да, действительно
лазер - 50р
ардуина - 50р
батарейка - 50р
стабилизатор - 30р
дисплей - 60р
фотодиод - 10р
Остальное было. Итого 250р. не считая пластика
да пойдет
Импортозамещение блэт!
1. батарейка типа "крона" стоит не менее 200 руб. (покупал самую душевую 1 месяц назад за 245 руб)
2. Ардуино NANO не менее 150 руб
3. Стабилизатор не менее 100 руб
4. Дисплей на 4-е сегмента - да верно, даже можно было дешевле
5. Фотодиод увы купить штучно только в наших магазинах можно, на алике только партией
6. лазер хуй с ним пусть так и будет
материал для 3D принтера
время (модель, печать, пайка, сборка)
итого: 570 руб без учета
Готовый 2500. самый дешманский.

Молодец! Мне тоже был нужен тахометр, измерять диапазон оборотов движка от стиралки.
Но я поленился делать. Просто купил. Работает хорошо. Там полоски из фольги, липкие. Приклеиваешь на шкив и меряешь. Всё чётко. Питание тоже от кроны.
А за рукожопство - зелень!
А как реализовано? Я себе на скутер тахометр сваял, значения скачут шопипец, так и не победил до конца, просто тупо увеличил интервал опроса . Можно кусок кода посмотреть со скользящим средним?
Под что асинхронные двигатели подбираются? Я ебу, что у людей в голове. Ну, зато сваять неведомую дичь удалось, молодец, хуй ли там.
А расчет системы, таки сделай. Почитай как вообще подбираются вентиляторы и насосы всякие, что такое производительность и с чем её едят. Ну и движок просто соответсвующий купи, не изобретая велосипед.
Блядь, как можно заниматься рабой, не имея вообще никаких знаний по теме? От этого и весь пиздец вокруг.
ну а такие как ты начинаю ныть что все не так!
У меня отопление в дачном доме хитрое - водо-воздушное. Нагретый антифриз идет в радиаторы от десятки, туда дует вентилятор и разносит по дому уже нагретый и отфильтрованный воздух.
готовые фанкойлы использовать не стал - дорого, да и по геометрии не пролазило под пол (там у меня собрано все). Поэтому рассчитал полуметровый вентилятор, вырезал лазером из фанеры, а привод от двигателя стиралки, т.к. валялся без дела. Но он шумный, поэтому хочу заменить на прямой привод без ремня, вентилятор прямо на вал двигателя насадить. Но я не знаю сколько сейчас дает оборотов он, вот заморочился чтоб узнать.

То что ты городишь, называется осевой вентилятор. Посчитай требуемую кратность воздухообмена и подбери соответсвующий двигатель с соответсвующей же крыльчаткой. Всё на листе бумаги делается, без изобретения ненужной пурги.
То что я горожу не называется осевым вентилятором. И, кстати, давно нагородил и это хорошо работает.

ну это надо тому учителю говорить, я-то по радиальным вентиляторам учебник прочитал и рассчитал конкретно этот под расход и давление
unsigned long lastTime=0;
unsigned long count=0;
bool input=false;
void setup()
Serial.begin(115200);
pinMode(TACH, INPUT_PULLUP);
pinMode(LED, OUTPUT);
pinMode(LASER, OUTPUT);
// All segments on
display.setSegments(data);
// Selectively set different digits
data[0] = display.encodeDigit(0);
data[1] = display.encodeDigit(1);
data[2] = display.encodeDigit(2);
data[3] = display.encodeDigit(3);
display.setSegments(data);
>
void loop()
digitalWrite(LASER,HIGH);
//передний фронт импульса
if(digitalRead(TACH)==LOW && input==false)
count ;
if(digitalRead(TACH)==LOW)
digitalWrite(LED, HIGH);
input=true;
>else digitalWrite(LED, LOW);
input=false;
>
if(millis()>lastTime 1000)
count=count*60;
if(count>9999)
count=9999;
countAvg[avgCurr]=count;
avgCurr ;
if(avgCurr>AVGCNT)
avgCurr=0;
avg=avg/AVGCNT;
lastTime=millis();
display.showNumberDec(avg, false);
count =0;
Ну, за ардуинство позеленю ,хотя прибор на уровне скетча из "примеров" (но отработку импульса я бы через прерывание сделал) , но компоновка прикольная (кроме кода хорошо бы ещё модельку корпуса выложить, - опенсорс, так опенсорс).
Один вопрос: а чем "обычный" оптодатчик не пронравился?

изначально с ним и планировал т.к. этих датчиков полно у меня. Но они в ИК диапазоне поэтому не видно куда там нацелил их. Ну и нестабильно импульсы формируются. Видимо яркости мало или еще чего.
В комплексе вентилятор вот под фильтром слева. Это вся установка уже третья версия. Три года работает.

о я ебу, я как бы и сам спаять чего бы иногда рад, но вначале прикидываю стоимость и целесообразность, в данной системе отопления я вижу тупо электрокотел, алюминиевые радиаторы на антифризе, пропилен и циркуляционный насос, а если хочется ибацца то прикрутить gsm реле (причем покупное) и это пиздец как надежно, тихо и ахуенно.
а так сидеть, ахуевать и считать обороты через самодельный тахометр на двигателе от стиралки через гнилые радиаторы от тачки подобранные на свалке (и не надо пиздеть, что они у тебя новые) и прикидывать что тише коллекторный или асинхронный, это, блядь, у меня слов подходящих нет.
Я как-нибудь напишу про свою систему отопления. Она необычная, вы все охуеете и будет стопицот возмущенных возгласов как от всех "профи" на профильных форумах. Единственно где это оценили это форум электронщиков, которые привыкли к сложным и нетривиальным, но эффективным решениям.
У меня гибридная система отопления, в ней камин греет антифриз, насос отправляет его в радиаторы, а оттуда по воздуховодам идет теплый воздух. Это дешевле и эффективнее. Просто для примера: два радиатора от 2110 стоят 3 тыщи рублей. Тепловая мощность каждого до 50 кВт. Радиаторы отопления обычные стоят 4..6 тыщ рублей, а мне их надо аж 13..15 штук! Деньги то у меня есть, я могу снести нахуй этот дом и построить заново по всем каннонам новый. Но я предпочитаю затратить интеллектуальные возможности и получить удовольствие от созидания.
Как результат: первый этаж дома площадью 48 квадратов прогревается с -10 до 24 за два часа затрачивая 30 кг дубовых дров. Дом деревянный.
Повторюсь, я делаю так заморочено не потому что хочу хочу результат на отъебись/лишь бы было, мне доставляет удовольствие процесс разработки. Кто-то бухает, кто-то колется, кто-то в танчики играет, а я люблю придумывать и делать.
каждый сам конечно волен распоряжаться как сам хочет,только представить не могу: воздуховоды в доме? как то хочется уюта а не цех с вытяжкой гудящей, я б последовательно с камином электрокотел а дальше уж написал, какойто уют же должен быть а не ХУЙ ЗНАЕТ ЧТО. или воздуховоды по фен шую? или все же тупо гофру раскидал по комнатам?
это все спрятано под полом, ничего не видно. А мотор жужжит только в одной комнате - на кухне. В спальнях ничего не слышно.
Я позже напишу подробный обзор на мою систему отопления и напишу почему я сделал именно так.
блин, всего Адна буква! я уж думал чел заморочился и сделал тахЕометр, и мне стало жутко интересно, как и зачем)
я много чего могу купить. Если так рассуждать - проще умереть и ничего не делать
Суть в техническом творчестве. В получении новых знаний и навыков.
| Цитата (барабаныч123 @ 15.01.2020 - 23:03) |
ну а такие как ты начинаю ныть что все не так! У меня отопление в дачном доме хитрое - водо-воздушное. Нагретый антифриз идет в радиаторы от десятки, туда дует вентилятор и разносит по дому уже нагретый и отфильтрованный воздух. |
Самопальный лазерный тахометр - последнее, о чём тебе надо думать.
воздушные каналы гибкие, два блока - вентилятор и радиатор - разделены резиновым воздуховодом, вентилятор на пружинном подвесе. Шумит сам мотор, у него рабочие обороты 15 тыщ. Передает вращение через поликлиновый ремень.
Ясно, шумодавов нет. Погугли тему, они нужны, шум (стоячая волна) по каналам идет.
О основном, шумит воздух, не мотор, подвесы не спасут.
Вот меня всегда удивляли люди которые по двум словам безапелляционно наваливают свое авторитетное мнение. при чем зацепятся за то что более менее входит в зону интересов и долбят далеко не по теме.
Вы то откуда знаете что шумит? Вы даже шума не слышали этого! Вентилятор приводится в движение коллекторным мотором с частотой 15 тыщ, они очень шумные сами по себе. При чем тут шумоподавители в воздуховодах то?
Люди высказывают своё мнение, потому что разбираются в вопросе.
Не так как ты, а б/м профессионально.
Я вот могу посчитать и вент и СО.
Поэтому и написал, что у тебя основной шум не от мотора и подвесов.
И это очевидно для меня, ибо я систем вент посчитал и сделал чуть больше сотни.
Но тебе похоже это не надо. Тебе плюсики за тему надо. Не ссы, я уже поставил и ещё поставлю.
З.Ы.
Зарекся писать в "строительных" темах. Но тут чёрт дернул
Даешь совет, но тебя же ещё и шпалят за это.
дружище, я могу отличить звук коллекторного двигателя от шума из воздуховода. Из воздуховода - тишина. А мотор слышно. Не сильно, но слышно как он жужжит под полом на кухне. И меня это немного бесит. Так что то что для тебя очевидно это твоя профессиональная деформация: ты делаешь важный вид типа ты дохуя знаешь. И начинаешь предполагать и на основе прошлого профессионального опыта и догадок - умничать. А на деле конкретную ситуацию ты не знаешь. Ты бы просто звук на месте услышал и сразу забрал бы свои слова обратно.
Насколько я помню, на моторах бывает такая штука как шильдик с моделью этого самого мотора, а ТТХ в интернете посмотреть стоит 0 рублей. Рукожопство это, конечно, хорошо. Но зачем тратить время, если шильдик всё же онаружится? :)
Ну хорошо. Двигатель коллекторный. Номинальная частота вращения у него вещь абстрактная и зависит от напряжения в сети. Так же зависит от нагрузки: больше нагрузка, меньше оборотов. Еще привод не прямой, а через поликлиновый ремень. На самом двигателе вал маленький, считать радиус по внутреннему или по внешнему диаметру? Второй шкив неизвестного размера, померить трудно, так как туда не подлезешь. Нужно лезть под пол, частично разбирать вентилятор. Мне проше прибор спаять. он пригодится для других целей
Есть на ондроеде звуковой осцилл
Гораздо легче присунуть вентилятору кредиткой
1) крону брал за 70 рублей в чипдипе.
2) arduino pro mini стоит 65 р на али. У меня их много
3) понижающий стаб 18 рублей
материала потратил 30 грамм. тыща рублей за килограмм, значит 30 руб. время не считаю
В общем конечно проще купить на али. Но это надо ждать. А у меня этих деталей валяется много. И если ардуины куда-нибудь применю, то дисплеи нафиг не нужны, хоть куда-то применю. Не лежать же им мертвым грузом. Вот взял и сделал, хоть какая-то польза.
Эм, а чем тебя частотники без обратной связи по скорости не устраивают? Да, регулирование не такое точное, но тебе оно и не нужно.
Частотник дорого
Но я его сам сделаю. По цене будет не на много дешевле, но тоже удовольствие от создания
А будет ли тише бесколлекторный движок. Если судить по трамваям частотное управление гораздо звучнее шелестения шёток коллекторного движка. К тому же диапазон вращения у бесколлекторных гораздо уже. Возможно шаговый двигатель был бы тише, но с ним ещё больше траблов, а первая это офигительная цена конструкции.
Они не гудят, они пищат. Смотря на какой частоте ШИМ работает, но мелкие движки почти не слышно, для мощных актуально, но они и без этого шумные
это ваще дичь, еще бы посоветовал сервоприводом вентилятор крутить, это пиздец, пойду ка я за пузырем
За время и усилия, которые потрачены на всю эту херабору, чувак грузчиком бы себе заработал на НОВУЮ машинку, а не насиловал старый труп.
ТС, ты слишком умный и совсем не практичный. Я бы обошёлся установкой стандартного энкодера от любого струйника на оптопаре и модифицированным синхронизатором.
А можно и банальным герконом или датчиком холла обойтись на мое имхо.
Размещено через приложение ЯПлакалъ
оптопара была в первом варианте. Не взлетело. По разным причинам. Геркон не подходит так как имеет ограниченную частоту срабатывания. Датчик холла - нужно на вращающуюся часть крепить магнит. Это не всегда возможно.
Обошёлся рублей в 500 и времени потраченного хуего туча . По мне проще заработать и купить.Я даже лопаты снеговые обленился делать , ибо опятьтаки проще заработать и купить .
Имхо конечно .
Размещено через приложение ЯПлакалъ
я могу многое купить, денег у меня по меркам среднего ЯПовца дохуя. А так это потому что я не ленюсь работать мозгами. И делаю я только то что мне интересно, те же лопаты или бетон месить, в общем все к чему не надо прикладывать интеллект - все покупаю.
Чем отличаются русский, американский и еврейский форумы?
- на американском форуме вы задаете вопрос и вам дают ответ
- на еврейском форуме вы задаете вопрос и вам задают встречный вопрос
- на русском форуме вы задаете вопрос и вам долго объясняют почему вы такой мудак.
За исходники спасибо.
Камрад,а мне на заказ сделаешь такой?В долгу не останусь :)
Размещено через приложение ЯПлакалъ
Нисколько не умаляя достоинства ТСа, хочу спросить.
В будущем, потому что у него есть возможность напечатать на 3д принтере, порезать на лазере и написать программку? Это все сейчас доступно каждому. Пригласи кружок юных техников из 70-80х, илон маск усрался бы от зависти))
Абсолютно не по этому. Хотя по этому)
Понимаете, инженеры всех веков всегда мечтали о свободе. Но не такой, какую нам рисуют демократы всех мастей (настоящего Инженера может только тошнить от этой пакости), а свободу владеть окружающей реальностью, насколько это позволяют человеку голова и руки. Насколько способен к обучению (то есть обладаешь усидчивостью, пластичным и сильным умом, волей, терпением), настолько и свободен!
И масса народу померла не увидя своей мечты, потому что все у них было, но воплотить свои идеи уровень техники и науки не позволяли! Видели беспомощные и гневные рисунки Леонардо, который и сделал бы все нарисованное, от чего то отказался бы, что то переделал благодаря опытам. только у него не было ни малейшего шанса. А ведь он, совершенствуя свои поделки, как все Инженеры это делают, непременно полетел бы! Да вот не судьба.
И вот свершилось. Все, что ты можешь придумать реального, сегодня ты МОЖЕШЬ воплотить. Вот как ТС, понадобилось и хлоп - готово уже, включаю! Да люди жизнь бы отдали за пару дней ТАК поработать. Беспомощный и горький смех вызывает нынешнее положение. Таких как ТС нынче единицы. Настала творческая свобода. а Инженеры практически перевелись.
Смотришь вокруг, и смешно и стыдно. Все эти косые жалкие поделки - это ВСЕ? Тьфу.
Читайте также: