
Разработка схемы управления приставки за рулем
В статье дается краткий обзор и анализ популярных схем, предназначенных для управления коллекторными двигателями постоянного тока, а также предлагаются оригинальные и малоизвестные схемотехнические решения
Электродвигатели являются, наверное, одним из самых массовых изделий электротехники. Как говорит нам всезнающая Википедия, электрический двигатель – электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую. Началом его истории можно считать открытие, которое сделал Майкл Фарадей в далеком 1821 году, установив возможность вращения проводника в магнитном поле. Но первый более-менее практический электродвигатель с вращающимся ротором ждал своего изобретения до 1834 года. Его во время работы в Кёнигсберге изобрел Мориц Герман фон Якоби, более известный у нас как Борис Семенович. Электродвигатели характеризуют два основных параметра – это скорость вращения вала (ротора) и момент вращения, развиваемый на валу. В общем плане оба этих параметра зависят от напряжения, подаваемого на двигатель и тока в его обмотках. В настоящее время имеется достаточно много разновидностей электродвигателей, и поскольку, как заметил наш известный литературный персонаж Козьма Прутков, нельзя объять необъятное, остановимся на рассмотрении особенностей управления двигателями постоянного тока (далее электродвигателями).
Коллекторные двигатели (Рисунок 1) более дешевы и, как правило, не требуют сложных систем управления. Для их функционирования достаточно подачи напряжения питания (выпрямленного, постоянного!). Проблемы начинают возникать, когда появляется необходимость в регулировке скорости вращения вала такого двигателя или в специальном режиме управления моментом вращения. Основных недостатков таких двигателей три – это малый момент на низких скоростях вращения (поэтому часто требуется редуктор, а это отражается на стоимости конструкции в целом), генерация высокого уровня электромагнитных и радиопомех (из-за скользящего контакта в коллекторе) и низкая надежность (точнее малый ресурс; причина в том же коллекторе). При использовании коллекторных двигателей необходимо учитывать, что ток потребления и скорость вращения их ротора зависят от нагрузки на валу. Коллекторные двигатели более универсальны и имеют более широкое распространение, особенно в недорогих устройствах, где определяющим фактором является цена.
Поскольку скорость вращения ротора коллекторного двигателя зависит, в первую очередь, от подаваемого на двигатель напряжения, то естественным является использование для его управления схем, имеющих возможность установки или регулировки выходного напряжения. Такими решениями, которые можно найти в Интернете, являются схемы на основе регулируемых стабилизаторов напряжения и, поскольку век дискретных стабилизаторов давно прошел, для этого целесообразно использовать недорогие интегральные компенсационные стабилизаторы, например, LM317 [2]. Возможные варианты такой схемы представлены на Рисунке 2.
Схема примитивная, но кажется очень удачной и, главное, недорогой. Посмотрим на нее с точки зрения инженера. Во-первых, можно ли ограничить момент вращения или ток двигателя? Это решается установкой дополнительного резистора. На Рисунке 2 он обозначен как RLIM. Его расчет имеется в спецификации, но он ухудшает характеристику схемы как стабилизатора напряжения (об этом будет ниже). Во-вторых, какой из вариантов управления скоростью лучше? Вариант на Рисунке 2а дает удобную линейную характеристику регулирования, поэтому он и более популярен. Вариант на Рисунке 2б имеет нелинейную характеристику. Но в первом случае при нарушении контакта в переменном резисторе мы получаем максимальную скорость, а во втором – минимальную. Что выбрать – зависит от конкретного применения. Теперь рассмотрим один пример для двигателя с типовыми параметрами: рабочее напряжение 12 В; максимальный рабочий ток 1 А. ИМС LM317, в зависимости от суффиксов, имеет максимальный выходной ток от 0.5 А до 1.5 А (см. спецификацию [2]; имеются аналогичные ИМС и с бóльшим током) и развитую защиту (от перегрузки и перегрева). С этой точки зрения для нашей задачи она подходит идеально. Проблемы скрываются, как всегда, в мелочах. Если двигатель будет выведен на максимальную мощность, что для нашего применения весьма реально, то на ИМС, даже при минимально допустимой разнице между входным напряжением VIN и выходным VOUT, равной 3 В, будет рассеиваться мощность не менее
Таким образом, нужен радиатор. Опять вопрос – на какую рассеиваемую мощность? На 3 Вт? А вот и нет. Если не полениться и рассчитать график нагрузки ИМС в зависимости от выходного напряжения (это легко выполнить в Excel), то мы получаем, что при наших условиях максимальная мощность на ИМС будет рассеиваться не при максимальном выходном напряжении регулятора, а при выходном напряжении равном 7.5 В (см. Рисунок 3), и она составит почти 5.0 Вт!
| Рисунок 3. | График зависимости мощности, рассеиваемой на ИМС регулятора, от выходного напряжения. |
Как видим, получается что-то уже не дешевое, но очень громоздкое. Так что такой подход годится только для маломощных двигателей с рабочим током не более 0.25 А. В этом случае мощность на регулирующей ИМС будет на уровне 1.2 Вт, что уже будет приемлемо.
На первом операционном усилителе собран генератор, на втором компаратор. На вход компаратора подается сигнал с конденсатора C1, а путем регулирования порога срабатывания формируется уже сигнал прямоугольной формы с нужным отношением τ/T (Рисунок 5).
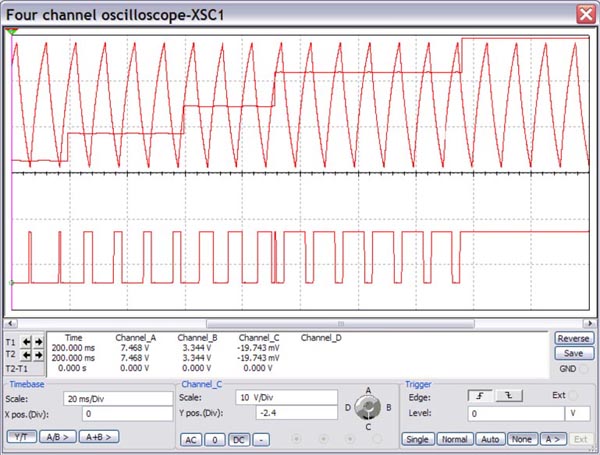 | |
| Рисунок 5. | Диаграмма управления коллекторным двигателем на основе ШИМ. Верхняя трасса – напряжение на конденсаторе С1; средняя (пересекает верхнюю) – сигнал управления (напряжение на движке резистора RV2); нижняя – напряжение на двигателе. |
Диапазон регулировки устанавливается подстроечными резисторами RV1 (быстрее) и RV3 (медленнее), а сама регулировка скорости осуществляется резистором RV2 (скорость). Обращаю внимание читателей, что в Интернете на русскоязычных форумах гуляет похожая схема с ошибками в номиналах делителя, задающего порог компаратора. Управление непосредственно двигателем осуществляется через ключ на мощном полевом транзисторе типа BUZ11 [4]. Особенности этого транзистора типа MOSFET – большой рабочий ток (30 А постоянного, и до 120 А импульсного), сверхмалое сопротивление открытого канала (40 мОм) и, следовательно, минимальная мощность потерь в открытом состоянии.
На что нужно в первую очередь обращать внимание при использовании таких схем? Во-первых, это исполнение цепи управления. Здесь в схеме (Рисунок 4) есть небольшая недоработка. Если со временем возникнут проблемы с подвижным контактом переменного резистора, мы получим полный почти мгновенный разгон двигателя. Это может вывести из строя наше устройство. Какое противоядие? Установить добавочный достаточно высокоомный резистор, например, 300 кОм с вывода 5 ИМС на общий провод. В этом случае при отказе регулятора двигатель будет остановлен.
Еще одна проблема таких регуляторов – это выходной каскад или драйвер двигателя. В подобных схемах он может быть выполнен как на полевых транзисторах, так и на биполярных; последние несравненно дешевле. Но и в первом и во втором варианте необходимо учитывать некоторые важные моменты. Для управления полевым транзистором типа MOSFET нужно обеспечить заряд и разряд его входной емкости, а она может составлять тысячи пикофарад. Если не использовать последовательный с затвором резистор (R6 на Рисунке 4) или его номинал будет слишком мал, то на относительно высоких частотах управления операционный усилитель может выйти из строя. Если же использовать R6 большого номинала, то транзистор будет дольше находиться в активной зоне своей передаточной характеристики и, следовательно, имеем рост потерь и нагрев ключа.
Еще одно замечание к схеме на Рисунке 4. Использование дополнительного диода D2 лишено смысла, так как в структуре транзистора BUZ11 уже имеется свой внутренний защитный быстродействующий диод с лучшими характеристиками, чем предлагаемый. Диод D1 также явно лишний, транзистор BUZ11 допускает подачу напряжения затвор-исток ± 20 В, да и переполюсовка в цепи управления при однополярном питании, как и напряжение выше 12 В, невозможны.









где Mн — номинальный момент двигателя; nс — синхронная скорость двигателя; I'р — приведенный к статору ток ротора; R'р — полное активное сопротивление ротора, приведенное к статору; nд — относительная скорость двигателя, nд = n/nс.
После размыкания контакта реле времени РДТ схема приходит в исходное состояние, двигатель плавно останавливается. Для ограничения постоянного тока служит дополнительный резистор Rт. На базе этой схемы созданы схемы управления электродвигателями лесопильных рам, шпалорезных и других крупных круглопильных станков.
Схема тиристорного управления пуском и торможением асинхронного двигателя с короткозамкнутым ротором. Такая схема изображена на рис. 4.17. В типовой схеме разомкнутого управления асинхронным двигателем с короткозамкнутым ротором в качестве силовых элементов, включенных в статорную цепь двигателя, используются тиристоры в сочетании с релейно-контактными аппаратами в цепи управления. Тиристоры выполняют роль силовых коммутаторов и, кроме того, легко позволяют осуществлять необходимый темп изменения напряжения на статоре двигателя регулированием угла включения тиристоров.

При пуске плавное изменение угла включения тиристоров дает возможность изменять приложенное к статору напряжение от нуля до номинального, тем самым ограничивать токи и момент двигателя. Схема содержит устройство динамического торможения в виде демпфирующего контура. Применение шунтирующего тиристора, замыкающего цепь тока между двумя фазами, приводит к увеличению постоянной составляющей тока, что создает достаточный тормозной момент в области высокой угловой скорости.
Рассмотрим типовую схему комплектного устройства, состоящего в силовой части из группы включенных встречно-параллельно тиристоров VS1. VS4 в фазах А и С и одного короткозамкнутого тиристора между фазами А и В — V5 для управления асинхронным двигателем М. Схема включает блок управления тиристорами БУ и релейно-контактный узел управления.
Нажатием кнопки S1 включается реле K1M и К2М, на управляющие электроды тиристоров VS1. VS4 подаются импульсы, сдвинутые на 60° относительно питающего напряжения. К обмоткам статора двигателя подается пониженное напряжение, уменьшаются пусковой ток и пусковой момент. Ротор двигателя увеличивает скорость вращения, разгоняется. Размыкающий контакт реле К1.2 отключает реле К3M с задержкой времени, зависящей от параметров резистора R7 и конденсатора С4. Размыкающими контактами реле К3М шунтируются соответствующие резисторы в блоке управления тиристорами БУ, и к статору прикладывается полное напряжение сети.
Для остановки двигателя нажимается кнопка S3, обесточивается релейная схема управления, тиристоры VS1. VS4 и напряжение со статора двигателя снимается. При этом за счет энергии, запасенной конденсатором С5, включается на время торможения реле К4М, которое своими контактами К4.2 и К4.3 включает тиристоры VS2 и VS5. По фазам А и В в обмотки статора двигателя протекает ток однополупериодного выпрямления, что обеспечивает эффективное динамическое торможение.
Сила тока, а следовательно, и время динамического торможения регулируются резисторами R1 и R3. Эта схема также имеет шаговый режим. При нажатии кнопки S2 включается реле K5M, которое своими контактами KS.3 и К5.4 включает тиристоры VS2 и VS5. В этом случае по фазам А и В в обмотки статора двигателя протекает ток однополупериодного выпрямления. При отпускании кнопки S2 выключается реле K5M и тиристоры VS2 и VS5; при этом на короткое время за счет энергии, запасенной в конденсаторе Сб, включается реле, которое своим контактом К6.2 включает тиристор VS3, и ротор двигателя поворачивается на некоторый угол вследствие поворота примерно на такой же угол результирующего вектора потока статора.
Шаг поворота зависит от напряжения сети, момента статической нагрузки, момента инерции привода и среднего значения выпрямленного тока. Реализация пошагового режима работы двигателя проводится после его остановки, так как реле К5М первоначально можно включить только после замыкания размыкающих контактов K1.5, К4.1. Шаговый режим работы двигателя создает благоприятные условия наладки.
Схема управления асинхронными электродвигателями с фазным ротором в функции времени. Такая схема представлена на рис. 4.18. Защита силовых цепей двигателя от токов короткого замыкания осуществляется с помощью реле максимального тока FI, F2, F3; защита от перегрузок — электротепловыми реле F4(1—2), нагревательные элементы которых включены через трансформаторы тока TT1, ТТ2. Цепи управления защищаются автоматическим выключателем F5, имеющим максимальную токовую защиту.
При включении рубильника SI и автоматического выключателя FS получит питание реле времени Д1М и замыкающие контакты его Д1А.1, Д1А.2 закроются, тем самым подготовится цепь включения реле времени Д2М и контактора K1M. Размыкающий контакт Д1А.3 разомкнется и выключит цепь катушек контакторов ускорения К2М, R3М, К4М.

Современное оборудование часто работает в автоматическом и полуавтоматическом режиме. Это позволяет исключить пресловутый человеческий фактор, увеличить объемы и темпы производимых операций, сделать производство более рентабельным. Одним из главных факторов надежной работы современного оборудования является безупречное выполнение включения электродвигателей, которое выполняется в заданной последовательности и с соблюдением штатного режима работы. Схемы управления электродвигателями могут быть различны, так как принципы автоматического и полуавтоматического режима работы могут существенно отличаться друг от друга.
Полуавтоматическое управление предусматривает участие оператора, который инициирует пуск оборудования нажатием соответственной кнопки или поворачивая рычаг. После этого функция персонала заключается лишь в контроле рабочего процесса. При автоматическом управлении первоначальный пуск оборудования осуществляют реле или датчики, после чего работы выполняется в соответствие с заданными программами. Такое программное устройство часто выполняется с помощью логических схем, вариантов которых может быть довольно много. В промышленности наиболее часто встречаются следующие схемы управления асинхронными электродвигателями:
• нереверсивного управления;
• реверсивного управления с двумя магнитными пускателями.
Основные схемы управления асинхронным электродвигателем
При использовании схемы управления электродвигателем с нереверсивным управлением после пуска происходит подключение к сети электромагнитной катушки. С ее сердечником соприкасается подвижный якорь и замыкает силовые контакты. В результате на двигатель подается трехфазное напряжение. Параллельно с силовыми контактами замыкаются блокировочные, что позволяет зашунтировать кнопку пуска и отпустить ее. Нажимая кнопку стоп, оператор тем самым разрывает цепь, от которой запитана электромагнитная катушка. Это освобождает якорь, который при падении размыкает силовые контакты, что приводит к остановке оборудования. В этой схеме управления защита от длительной перегрузки обеспечивается подключением к двум фазам тепловых реле.
Схемы управления электродвигателями постоянного тока и синхронными двигателями
Схема управления электродвигателем постоянного тока может быть следующих видов:
• с нижним расположением ключа;
• с верхним расположением ключа;
• мостовая схема.
Все они базируются на принципах ШИМ и основных характеристиках двигателя. Наиболее экономичной схемой является с нижним расположением ключа, его верхнее расположение используют при повышенных требованиях к безопасности. Мостовая схема используется при реверсивном управлении двигателем.
Синхронные двигатели сложнее асинхронных, но они менее чувствительны к колебаниям напряжения и более устойчивы к перегрузкам. Это стало причиной их широкого распространения. Схема управления синхронным электродвигателем обычно включается в себя тиристорные возбудители, которые заменили электромашинные возбудители, долгое время являвшиеся уязвимым местом этого типа электромоторов.
Непосредственный объект управления для РКСУ — это двигатель, питаемый от сети. Электропривод, выполненный на такой основе, представляет собой простой нерегулируемый электропривод, в основном общепромышленного применения (например, электропривод кранов, тихоходных лифтов, конвейеров, компрессоров, вентиляторов, насосов, некоторых транспортных устройств и т. п.). Некоторые технические характеристики релейно-контакторной аппаратуры приведены далее:
время срабатывания, с 0,005. 0,1
частота включений, ч -1 :
для контакторов 600. 1200
для реле 1200. 3600
Потребляемая мощность, В • А:
для контакторов 5. 50
Срок службы (общее число включений) 10 6 . 10 7
Достоинства РКСУ —наличие гальванической развязки цепей; значительная коммутационная мощность; высокая помехоустойчивость; возможность использования единого источника питания для силовых и управляющих цепей.
Недостатки РКСУ — контактная коммутация, требующая соответствующего ухода за аппаратурой и ограничивающая срок ее службы; ограниченное быстродействие; повышенные массогабаритные показатели и энергопотребление.
В составе РКСУ можно выделить по функциональному назначению две части: управляющую (формирующую алгоритм управления, включающую различные реле) и исполнительную, непосредственно осуществляющую управляющие воздействия на двигатель (контакторы, магнитные пускатели). В РКСУ входят типовые узлы, выполняющие определенные функции. Помимо них участвуют нетиповые узлы для решения конкретной технологической задачи, например узел защиты рабочего органа от пробуксовки приводного шкива, превышения скорости и т. п.

Рис. 3.6. Схема силовой части узла пуска по принципу времени

Рис. 3.7. Схема цепей управления узла пуска по принципу времени
На рисунке 3.6 приведен пример выполнения силовой части типового узла пуска в три ступени, реализующего принцип времени. Пусковые резисторы Rl, R2, R3 якорной цепи двигателя постоянного тока коммутируются контакторами К М3-1, КМ3-2, КМ3-3. Электромагнитные реле времени постоянного тока КТ1, КТ2, КТЗ создают рассчитанные выдержки времени для переключения пусковых резисторов, обеспечивая поддержание постоянным требуемого ускорения.
В схеме управления узла пуска по принципу времени (рис. 3.7) блок-контакты КМ1 и КМ2 замкнуты, обеспечивая срабатывание реле времени КТ1, которое размыкает свой контакт в цепи катушки магнитного пускателя КМЗ-1, подготавливая схему автоматическому пуску по принципу времени при срабатывании одного из магнитных пускателей КМ1 или КМ2.
На рисунке 3.8 приведен пример выполнения узлов пуска и торможения противовключением по принципу тока. В силовую

Рис. 3.8. Схема узлов пуска и торможения по принципу тока цепь двигателя включены токовые реле пуска КЛ1 и торможения КА4. При включении контактора КМ1 или КМ2 в первую очередь вступает в работу узел торможения включением контактора КМ4, шунтирующего тормозной резистор R1 и реле КА4. Замыкание контакта КМ4 в цепи пусковых контакторов дает разрешение на работу узла пуска. Промежуточные реле КО и К1 исключают подачу напряжения на катушки контакторов КМ4 и КМ3-2 до момента полного отпускания реле КЛ4 и КА1.
Важнейшая типовая функция РКСУ — защита электрической и механической частей электропривода от аварийных режимов. Задача узла защиты — отключить двигатель от источника питания и остановить рабочий орган производственной машины. Аварийные режимы в электрических цепях двигателя были рассмотрены ранее.
Аварийные режимы в механической части электропривода. К. числу аварийных режимов в механической части электропривода относят : превышение допустимого момента в механической передаче (заклинивание механизма); расцепление рабочего органа (РО) с валом двигателя; превышение допустимой скорости двигателя или РО; выход РО за пределы зоны допустимых перемещений.
Перечень типовых аварийных режимов и соответствующих средств защиты от них приведен в таблице 3.3.
3.3. Аварийные режимы и средства защиты
Электрическая часть
Короткие замыкания; перегрузка силовых цепей по нагреву
Быстродействующие автоматы; плавкие предохранители; реле максимального тока; тепловое реле
Перебои в электроснабжении; недопустимое снижение напряжения в сети
Нулевая блокировка; реле минимального напряжения; реле минимального тока
Механическая часть
Перегрузка механизма по моменту (заклинивание)
Муфта предельного момента; предохранительная шпонка
Расцепление рабочего органа с валом двигателя
Двойная тормозная система
Превышение допустимой скорости рабочего органа
Реле максимальной скорости
Выход рабочего органа за пределы зоны допустимых перемещений
Защитные путевые выключатели
Электрическая часть
Короткие замыкания; перегрузка си- Быстродействующие автоматы; плавкие ловых цепей по нагреву предохранители; реле максимального
тока; тепловое реле
Перебои в электроснабжении; недо- Нулевая блокировка; реле минимально- пустимое снижение напряжения в го напряжения; реле минимального тока сети
Механическая часть
Перегрузка механизма по моменту Муфта предельного момента; предохра- (заклинивание) нительная шпонка
Расцепление рабочего органа с валом Двойная тормозная система двигателя
Превышение допустимой скорости Реле максимальной скорости рабочего органа
Выход рабочего органа за пределы Защитные путевые выключатели зоны допустимых перемещений
В подъемно-транспортных установках с активным моментом нагрузки защиту от аварийного режима выполняют установкой тоомозной системы непосредственно на РО.

Рис. 3.9. Принципиальная электрическая схема реверса асинхронного двигателя
Остановимся на некоторых часто встречающихся в практике схемах.
Реверс асинхронного двигателя. Принципиальная электрическая схема для этого случая приведена на рисунке 3.9. Особенность схемы — наличие электрической блокировки, которая выполнена на размыкающихся блок- контактах К1:2 и К2 :2 в цепи питания катушек магнитных пускателей К1 и К2. При срабатывании пускателя Kit го размыкающий блок-контакт К1:2 разрывает цепь катушки пускателя К2, исключая их совместную работу. Чтобы двигатель выполнил реверс, следует нажать кнопку S1, тогда обесто- чится катушка пускателя К1 и блок-контакт К1:2, замыкаясь, подготовит электрическую цепь для питания катушки пускателя К2. При нажатии кнопки S3 сработает магнитный пускатель К2 и силовыми контактами подключит электродвигатель Ml к трехфазной сети переменного тока, предварительно изменив чередование двух фаз. Блок-контакты К2:2 выполняют в схеме функции, аналогичные К1:2.
Динамическое торможение асинхронного двигателя. Работу электрической схемы (рис. 3.10) можно разделить на два этапа: пуск асинхронного двигателя и динамическое торможение. На первом этапе включают автомат QF1, нажимают кнопку S2 (пуск), при этом срабатывает пускатель К1 и подключает двигатель Ml к трехфазной сети, приводя его во вращение. Замыкающий блок-контакт К1: 1 шунтирует кнопку S2, размыкающий блок-контакт К1:2 рвет цепь катушки пускателя К2, осуществляя электрическую блокировку, а третий блок-контакт К1: 3 подключает катушку реле времени КЗ к источнику постоянного тока. Реле срабатывает и замыкает контакт КЗ: 1 в цепи катушки К2, включения пускателя К2 не произойдет из-за открытого размыкающего контакта К1:2.
На втором этапе нажимают кнопку 57 (стоп), при этом обесточивается катушка пускателя К7, который отключает двигатель от сети переменного тока. Одновременно блок-контакт К1:1 дешун- тирует кнопку S2. Размыкающий блок-контакт К1:2, замыкаясь, включает пускатель К2У подсоединяющий обмотку статора к источнику постоянного тока. С этого момента начинается режим динамического торможения, длительность которого определяется выдержкой времени реле КЗ. Катушка реле времени КЗ обесточивается блок-контактом К1:3. По истечении выдержки времени контакт КЗ: 7 откроется и разорвет цепь катушки пускателя К2, который отключит источник постоянного тока от статорной обмотки и динамическое торможение прекратится.
В схеме предусмотрена защита от короткого замыкания в силовой цепи автоматом QF1, в цепях управления — предохранителями FI, F2, в цепи источника постоянного тока — предохранителями F3, F4. Защита от перегрузки выполнена на тепловом реле К4. Электрическая блокировка выполнена на размыкающихся блок- контактах К1:2 и К2:7. Резистор R1 предназначен для регулирования постоянного тока в режиме динамического торможения.

Рис. 3.10. Принципиальная электрическая схема динамического торможения асинхронного двигателя
Следует учесть, что в обмотку статора подается пониженное напряжение постоянного тока из расчета, чтобы для получения максимального момента максимальный ток возбуждения достигал трехкратного значения трехфазного тока холостого хода. Тогда напряжение возбуждения будет определяться произведением максимального тока возбуждения на активное сопротивление элементов цепи возбуждения.

Управлять асинхронными электродвигателями с короткозамкнутым ротором можно посредством контакторов. При использовании маломощных электродвигателей, для которых нет необходимости ограничивать пусковой ток, запуск производится при действующем напряжении.
Нереверсивная схема управления асинхронного двигателя.

Рисунок 1 — Простейшая схема асинхронного двигателя
Для подачи напряжения на управляющую и силовую цепь используется автоматический выключатель QF. Пуск асинхронного двигателя осуществляется кнопкой SB1 «Пуск”, которая замыкает свои контакты в цепи катушки магнитного пускателя КМ. Который срабатывая замыкает основные контакты силовой цепи статора. Вследствие чего электродвигатель М подсоединяется к питанию. В то же время в управляющей сети происходит замыкание блокирующего контакта КМ который шунтирует кнопку SB1.
- от КЗ — посредством автоматического выключателя QF и плавкими предохранителями FU;
- от перегрузок — посредством теплореле КК (при перегреве данные устройства отсоединяют контактор КМ, прекращая работу движка);
- нулевая защита — посредством магнитного пускателя КМ (при низком напряжении или его полном отсутствии контактор КМ оказывается незапитанным, размыкается и электродвигатель выключается).
Для подключения электродвигателя после срабатывания защитного механизма требуется снова надавить клавишу SB1.
Реостатный пуск асинхронного двигателя с кз ротором.
Если невозможно запустить АД с кз ротором в стандартном режиме, используют запуск при сниженном напряжении. С этой целью в цепь статора добавляют сопротивление, реостат или используют автотрансформатор. Автоматический выключатель QF срабатывает и на управляющую и силовую цепь поступает напряжение. После нажатия кнопки SB1 пускатель КМ1 приходит в действие, подавая электроток в цепь статора с включенным сопротивлением. В то же время питание поступает и на реле времени КТ.

Рисунок 2 — Схема асинхронного двигателя с симметричными сопротивлениями (реостатный пуск)
Через определенный временной интервал, задаваемый реле КТ, происходит замыкание контакта КТ. В итоге пускатель КМ2 шунтирует (закорачивает) сопротивление статора. Процедура запуска электродвигателя завершается. Для его выключения необходимо нажать клавишу SB2 и выключить автомат QF.
Реверсивный пуск асинхронного двигателя

Рисунок 3. Схема реверсивный пуск асинхронного двигателя с кз ротором.
В данной схеме нажатием кнопки реверса меняется чередование фаз питающего напряжения на статоре двигателя, что будет вызывать смену направленности его вращения (реверсом). При помощи нормально замкнутых контактов КМ1 и КМ2 выполнена защита от ошибочного включения сразу двух магнитных пускателей КМ1 и КМ2. Также действуют защиты, аналогичные описанным ранее. Отключить электродвигатель можно кнопкой SB3 и автоматом QF.
Читайте также: