
Как обозначается шина данных
Шина адреса -- вторая по важности шина, которая определяет максимально возможную сложность микропроцессорной системы, то есть допустимый объем памяти и, следовательно, максимально возможный размер программы и максимально возможный объем запоминаемых данных.Количество адресов, обеспечиваемых шиной адреса, определяется как 2* N , где N -- количество разрядов. Например, 16-разрядная шина адреса обеспечивает 65 536 адресов. Разрядность шины адреса обычно кратна 4 и может достигать 32 и даже 64.Шина адреса может быть однонаправленной (когда магистралью всегда управляет только процессор) или двунаправленной (когда процессор может временно передавать управление магистралью другому устройству, например контроллеру ПДП). Наиболее часто используются типы выходных каскадов с тремя состояниями или обычные ТТЛ (с двумя состояниями).
Как в шине данных, так и в шине адреса может использоваться положительная логика или отрицательная логика. При положительной логике высокий уровень напряжения соответствует логической единице на соответствующей линии связи, низкий -- логическому нулю. При отрицательной логике наоборот. В большинстве случаев уровни сигналов на шинах -- ТТЛ.
Для снижения общего количества линий связи магистрали часто применяется мультиплексирование шин адреса и данных. То есть одни и те же линии связи используются в разные моменты времени для передачи как адреса, так и данных (в начале цикла -- адрес, в конце цикла -- данные). Для фиксации этих моментов (стробирования) служат специальные сигналы на шине управления. Понятно, что мультиплексированная шина адреса/данных обеспечивает меньшую скорость обмена, требует более длительного цикла обмена (рис. 2.1). По типу шины адреса и шины данных все магистрали также делятся на мультиплексированные и немультиплексиронанные.
Шина управления -- это вспомогательная шина, управляющие сигналы на которой определяют тип текущего цикла и фиксируют моменты времени, соответствующие разным частям или стадиям цикла. Кроме того, управляющие сигналы обеспечивают согласование работы процессора (или другого хозяина магистрали, задатчика, master) с работой памяти или устройства ввода/вывода (устройства-исполнителя, slave). Управляющие сигналы также обслуживают запрос и предоставление прерываний, запрос и предоставление прямого доступа.
Сигналы шины управления могут передаваться как в положительной логике (реже), так и в отрицательной логике (чаще). Линии шины управления могут быть как однонаправленными, так и двунаправленными. Типы выходных каскадов могут быть самыми разными: с двумя состояниями (для однонаправленных линий), с тремя состояниями (для двунаправленных линий), с открытым коллектором (для двунаправленных и мультиплексированных линий).
Самые главные управляющие сигналы -- это стробы обмена, то есть сигналы, формируемые процессором и определяющие моменты времени, в которые производится пересылка данных по шине данных, обмен данными.
Чаще всего в магистрали используются два различных строба обмена:
* Строб записи (вывода), который определяет момент времени, когда
устройство-исполнитель может принимать данные, выставленный
процессором на шину данных;
* Строб чтения (ввода), который определяет момент времени, когда
устройство-исполнитель должно выдать на шину данных код данных, который будет прочитан процессором.
При этом большое значение имеет то, как процессор заканчивает обмен в пределах цикла, в какой момент он снимает свой строб обмена. Возможны два пути решения (рис. 2.2):
- * При синхронном обмене процессор заканчивает обмен данными самостоятельно, через раз и навсегда установленный временной интервал выдержки (tВЫД), то есть без учета интересов устройства-исполнителя;
- * При асинхронном обмене процессор заканчивает обмен только тогда,
когда устройство-исполнитель подтверждает выполнение операции специальным сигналом (так называемый режим handshake-рукопожатие).
Достоинства синхронного обмена -- более простой протокол обмена, меньшее количество управляющих сигналов. Недостатки -- отсутствие гарантии, что исполнитель выполнил требуемую операцию, а также высокие требования к быстродействию исполнителя.
Достоинства асинхронного обмена -- более надежная пересылка дан-мых, возможность работы с самыми разными по быстродействию исполнителями. Недостаток -- необходимость формирования сигнала подтверждения всеми исполнителями, то есть дополнительные аппаратурные пираты.
Какой тип обмена быстрее, синхронный или асинхронный? Ответ на этот вопрос неоднозначен. С одной стороны, при асинхронном обмене требуется какое-то время на выработку, передачу дополнительного сигнала и на его обработку процессором. С другой стороны, при синхронном обмене приходится искусственно увеличивать длительность строба обмена для соответствия требованиям большего числа исполнителей, чтобы они успевали обмениваться информацией в темпе процессора. Поэтому иногда в магистрали предусматривают возможность как синхронного, так и асинхронного обмена, причем синхронный обмен является основным и довольно быстрым, а асинхронный применяется только для медленных исполнителей.По используемому типу обмена магистрали микропроцессорных систем также делятся на синхронные и асинхронные.
С другими устройствами, и в первую очередь с оперативной памятью, процессор связан группами проводников, которые называются шинами. Основных шин три:
· командная шина или шина управления.
Адресная шина. Данные, которые передаются по этой шине трактуются как адреса ячеек оперативной памяти. Именно из этой шины процессор считывает адреса команд, которые необходимо выполнить, а также данные, с которыми оперируют команды. В современных процессорах адресная шина 32-разрядная, то есть она состоит из 32 параллельных проводников.
Шина данных. По этой шине происходит копирование данных из оперативной памяти в регистры процессора и наоборот. В ПК на базе процессоров Intel Pentium шина данных 64-разрядная. Это означает, что за один такт на обработку поступает сразу 8 байт данных.
Командная шина. По этой шине из оперативной памяти поступают команды, выполняемые процессором. Команды представлены в виде байтов. Простые команды вкладываются в один байт, но есть и такие команды, для которых нужно два, три и больше байта. Большинство современных процессоров имеют 32-разрядную командную шину, хотя существуют 64-разрядные процессоры с командной шиной.
Шины на материнской плате используются не только для связи с процессором. Все другие внутренние устройства материнской платы, а также устройства, которые подключаются к ней, взаимодействуют между собой с помощью шин. От архитектуры этих элементов во многом зависит производительность ПК в целом.
Основные шинные интерфейсы материнских плат:
ISA (Industry Standard Architecture). Разрешает связать между собой все устройства системного блока, а также обеспечивает простое подключение новых устройств через стандартные слоты. Пропускная способность составляет до 5,5 Мбайт/с. В современных компьютерах может использоваться лишь для подсоединения внешних устройств, которые не требуют большей пропускной способности (звуковые карты, модемы и т.д.).
EISA (Extended ISA). Расширение стандарта ISA. Пропускная способность возросла до 32 Мбайт/с. Как и стандарт ISA, этот стандарт исчерпал свои возможности и в будущем выпуск плат, которые поддерживают эти интерфейсы прекратится.
VLB (VESA Local Bus). Интерфейс локальной шины стандарта VESA. Локальная шина соединяет процессор с оперативной памятью в обход основной шины. Она работает на большей частоте, чем основная шина, и позволяет увеличить скорость передачи данных. Позже, в локальную шину "врезали" интерфейс для подключения видеоадаптера, который требует повышенной пропускной способности, что и привело к появлению стандарта VLB. Пропускная способность - до 130 Мбайт/с, рабочая тактовая частота - 50 МГц, но она зависит от количества устройств, подсоединенных к шине, что является главным недостатком интерфейса VLB.
PCI (Peripherial Component Interconnect). Стандарт подключения внешних устройств, введенный в ПК на базе процессора Pentium. По своей сути, это интерфейс локальной шины с разъемами для подсоединения внешних компонентов. Данный интерфейс поддерживает частоту шины до 66 МГц и обеспечивает быстродействие до 264 Мбайт/с независимо от количества подсоединенных устройств. Важным нововведением этого стандарта является поддержка механизма plug-and-play, суть которого состоит в том, что после физического подключения внешнего устройства к разъему шины PCI происходит автоматическая конфигурация этого устройства.
FSB (Front Side Bus). Начиная с процессора Pentium Pro для связи с оперативной памятью используется специальная шина FSB. Эта шина работает на частоте 100-133 МГц и имеет пропускную способность до 800 Мбайт/с. Частота шины FSB является основным параметром, именно она указывается в спецификации материнской платы. За шиной PCI осталась лишь функция подключения новых внешних устройств.
AGP (Advanced Graphic Port). Специальный шинный интерфейс для подключения видеоадаптеров. Разработан в связи с тем, что параметры шины PCI не отвечают требованиям видеоадаптеров по быстродействию. Частота этой шины - 33 или 66 МГц, пропускная способность до 1066 Мбайт/с.
USB (Universal Serial Bus). Стандарт универсальной последовательной шины определяет новый способ взаимодействия компьютера с периферийным оборудованием. Он разрешает подключать до 256 разных устройств с последовательным интерфейсом, причем устройства могут подсоединяться цепочкой. Производительность шины USB относительно небольшая и составляет 1,55 Мбит/с. Среди преимуществ этого стандарта следует отметить возможность подключать и отключать устройства в "горячем режиме" (то есть без перезагрузки компьютера), а также возможность объединения нескольких компьютеров в простую сеть без использования специального аппаратного и программного обеспечения.
Шину данных образуют линии, служащие для передачи данных между отдельными структурными группами ПК. Исходным пунктом линий данных является центральный процессор. Он определяет разрядность шины данных, т.е. число линий, по которым передаются данные. Чем выше разрядность шины данных, тем больший объем данных можно передать по ней за некоторый определенный промежуток времени и тем выше быстродействие компьютера.
В первых ПК использовался процессор Intel 8088. Этот 16-разрядный процессор имел всего лишь 8 внешних линий данных (этим объясняется его низкая стоимость). Для внутренних операций было задействовано 16 линий данных, благодаря чему процессор мог одновременно обрабатывать два восьмиразрядных числа. Но на внешнем уровне к нему присоединялась дешевая восьмиразрядная шина данных. Эти 8 линий обеспечивали связь со всеми микросхемами на системной плате, выполняющими функции обработки данных, и всеми платами расширения, установленными в гнездах. Таким образом осуществлялась передача данных между платами расширения и процессором.
Современные процессоры допускают внешнее подключение большего числа линий данных: процессор 80286 — 16 линий данных, процессоры 80386 DX и 80486 DX — 32 линии, а процессор Pentium — 64 линии данных.
Адресная шина. Разрядность шины
Другая группа линий образует адресную шину. Эта шина используется для адресации. Каждая ячейка памяти и устройство ввода-вывода компьютера имеет свой собственный адрес.
При считывании или записи данных процессор должен сообщать, по какому адресу он желает прочитать или записать данные, для чего необходимо указать этот адрес.
В отличие от шины данных шина адреса является однонаправленной.
Разрядность адресной шины определяет максимальное число адресов, по которым может обратиться процессор, т. е. число линий в адресной шине показывает, каким объемом памяти может управлять процессор. Учитывая, что одна адресная линия обеспечивает представление одного разряда двоичного числа, формулу для максимального объема адресуемой памяти можно записать в следующем виде:
максимальное число адресов = 2n,
где n — разрядность адресной шины.
Процессор 8088 имел 20 адресных линий, что в соответствии с приведенной формулой обеспечивало адресацию памяти объемом:
220 =1 048 576 байт = 1024 Кбайт = 1 Мбайт.
Это тот самый предельный объем памяти, который все еще имеет силу в операционной системе DOS.
Совсем иная ситуация с процессором 80286. Он имеет 24 адресных линии и поэтому в состоянии управлять памятью объемом:
224= 16 777 216 байт =16 Мбайт.
Для обеспечения связи с микросхемами памяти число адресных линий процессора должно равняться числу адресных линий на системной плате.
Процессоры 80386, 80486 и Pentium имеют 32 адресных линии, что обеспечивает адресацию свыше 4 млрд. ячеек памяти. На системной плате с такими процессорами должно быть 32 линии, обеспечивающие обмен адресами между центральным процессором и всеми важными периферийными микросхемами.
Линии шины управления на системной плате служат для управления различными компонентами ПК. По выполняемой ими функции их можно сравнить с переводной стрелкой на железнодорожных путях.
С помощью небольшого числа линий шина управления обеспечивает такое функционирование системы, чтобы в каждый данный момент времени только одна структурная единица ПК пересылала данные по шине данных или осуществляла адресацию памяти.
К шине может быть подключено много приемных устройств. Сочетание управляющих и адресных сигналов определяет, для кого именно предназначаются данные на шине. Управляющая логика возбуждает специальные стробирующие сигналы, чтобы указать получателю, когда ему следует принимать данные.
Управляющая логика активизирует в каждый конкретный момент только одно устройство, которое становиться ведущим. Когда устройство активизировано, оно помещает свои данные на шину. Все другие микросхемы в этот промежуток времени должны блокироваться с помощью соответствующего сигнала на линии управления.
Микропроцессор взаимодействует с внешней средой с помощью шины адреса/данных/состояния и нескольких управляющих сигналов. Собственно взаимодействие заключается в выполнении одной из двух операций: МП либо выводит (записывает) данные, либо вводит (считывает) данные или команды. В каждой из этих операций процессор должен указывать то устройство, с которым он будет взаимодействовать; другими словами, процессор должен адресовать ячейку памяти либо порт ввода или вывода.
Для передачи данных или выборки команды процессор инициирует так называемый цикл шины. Кроме процессора, цикл шины могут инициировать и другие устройства, например, арифметический сопроцессор.
Цикл шины представляет собой последовательность событий, в течение которой процессор выдает адрес ячейки памяти или периферийного устройства, а затем формирует сигнал записи или считывания, а также выдает данные в операции записи. Выбранное устройство воспринимает данные с шины в цикле записи или помещает данные на шину в цикле считывания. По окончании цикла шины устройство фиксирует записываемые данные или снимает считываемые данные.
Рассмотрим цикл шины микропроцессора 8086, который имеет совмещенную 20-разрядную шину адреса/данных/состояния и шину управления (рис. 4).
Рис. 4. Шины микропроцессора 8086
Цикл шины микропроцессора 8086 состоит минимум из четырех тактов синхронизации, называемых также состояниями T, которые идентифицируются спадающим фронтом сигнала синхронизации CLC. В первом такте (T1) процессор выдает на шину адреса/данных/состояния AD20-AD0 адрес устройства, которое будет источником или получателем информации в текущем цикле шины. Во втором такте (T2) процессор снимает адрес с шины и либо переводит тристабильные буферы линий AD15-AD0 в высокоимпедансное состояние, подготавливая их к выводу информации в цикле считывания, либо выдает на них данные в цикле записи.
Управляющие сигналы, инициирующие считывание, запись или подтверждение прерываний, всегда выдаются в такте T2. В максимальной конфигурации системы сигнал записи формируется в такте T3, чтобы гарантировать стабилизацию сигналов данных до начала действия этого сигнала.
В такте T2 старшие четыре линии адреса/состояния переключаются с режима выдачи адреса на режим выдачи состояния. Сигналы состояния предназначены в основном для диагностических целей, например, идентифицируют сегментный регистр, который участвует в формировании адреса памяти.
В течение такта T3 процессор сохраняет информацию на линиях состояния. На шине данных в цикле записи сохраняются выводимые данные, а в цикле считывания производится опрос вводимых данных.
Тактом T4 заканчивается цикл шины. В этом такте снимаются все управляющие сигналы и выбранное устройство отключается от шины.
Таким образом, цикл шины для памяти или периферийного устройства представляет собой асинхронное действие. Устройство может управлять циклом шины только путем введения состояний ожидания.
Процессор выполняет цикл шины в том случае, когда ему необходимо осуществить запись или считывание информации. Если циклы шины не требуются, шинный интерфейс реализует холостые состояния Ti, в течение которых процессор сохраняет на линиях состояния сигналы состояния от предыдущего цикла шины.
Статьи к прочтению:
Как выбрать видеокарту. Или почему шина 256 бит — не рулит. (см. описание)
Похожие статьи:
Современные устройства радиоэлектронной техники используют большое число микросхем, что требует много линий для адресации, выбора и управления их…
Шины микропроцессорной системы и циклы обмена Самое главное, что должен знать разработчик микропроцессорных систем — это принципы организации обмена…
Controller Area Network (шина данных CAN)
В период с 1984 по 1986 г.г., компанией Robert Bosch GmbH был придуман, разработан и воплощен в производство стандарт CAN - Controller Area Network (сеть контроллеров) , основной целью которого является объединение в единую сеть различных исполнительных устройств, датчиков, сенсоров и т.п.
И как оказалось впоследствии, шина данных CAN действительно имела множество преимуществ перед обычными жгутами проводов, причислим некоторые:
Электромагнитная совместимость
Раньше об этом понятии задумывались мало или вообще не задумывались. Потому что автомобилям хватало небольшого пучка проводов и пару-тройку устройств для нормальной работы двигателя внутреннего сгорания.
Однако технический прогресс идет вперед, вопросы экологии, безопасности дорожного движения и водителя, как участника этого движения, выходят на первое место, что приводит к постоянному увеличению количества электронных устройств на автомобиле.
Это способность одновременного и стабильного функционирования множества различных электронных устройств на автомобиле без создания электромагнитных помех друг другу .
Шина CAN как раз отвечает этим важным требованиям.
Более конкретно об этом вопросе чуть позже.
Уменьшение количества кабельных соединений

Сначала немного о том, что же такое эта шина и как она выглядит:
Почему используется двухпроводная схема передачи данных:
- для стабильности распознавания ошибок
- для увеличения и повышения надёжности работы по передаче данных
Предположим, что пик напряжения возникнет только на одном проводе (например, вследствии проблем по электромагнитной совместимости) .
И тогда блоки-приёмники могут идентифицировать это как ошибку и проигнорировать данный пик напряжения.
Если же произойдет короткое замыкание или обрыв одного из двух проводов, то благодаря интегрированной программно-аппаратной концепции надёжности произойдёт переключение в режим работы по однопроводной схеме, и повреждённая передающая линия использоваться не будет.
-
Провода от датчиков проводятся только к ближайшему блоку управления, который преобразует измеренные значения в пакет данных и передаёт его на шину данных CAN.
Пакет данных шины CAN
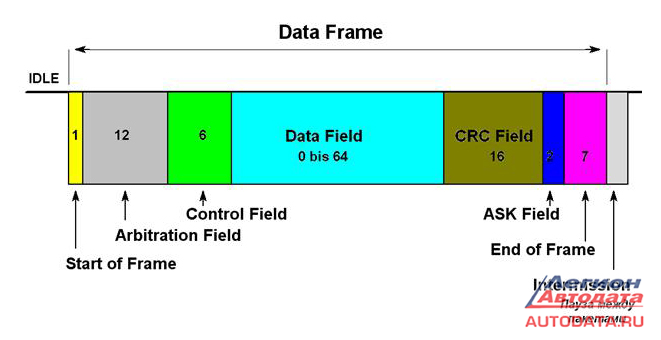
Описание полей пакета данных Start of Frame
Arbitration Field
Это поле состоит из идентификатора адреса в 11 бит и 1 контрольного бита и запрос (Remote Transmission Request-Bit).
Control Field (управл. биты)
Поле управления (6 бит) содержит бит IDE (Identifier Extension Bit) для распознавания стандартного и расширенного формата, резервный бит для последующих расширений и - в последних 4 битах - количество байтов данных, заложенных в Data Field (поле данных).
Data Field (данные)
CRC Field (контрольное поле)
Поле CRC (Cyclic-Redundancy-Check Field) содержит 16 бит и служит для контрольного распознавания ошибок при передаче данных.
АСК Field (подтверждение приема)
End of Frame (конец фрейма)
Маркирует конец пакета данных
Intermission (интервал)
Интервал между двумя пакетами данных. Интервал должен составлять не менее 3 битов. После этого любой блок управления может передавать следующий пакет данных.
IDLE (режим покоя)
Прием и передача данных
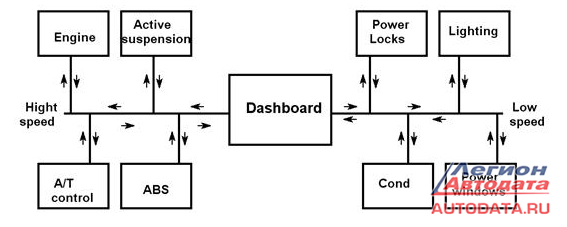
К примеру на некоторых автомобилях, шлюзом между быстрой и медленной шиной является панель приборов (Ауди,Фольксваген), у Мерседеса функции шлюза выполняет EZS (замок зажигания), хотя сама панель работает в двух сетях, для отображения как салонной, так и моторной информации.
Например, High-Speed-CAN – это шина двигателя, АКПП и т.п., имеет скорость передачи данных 500 Кбит
Low-Speed-CAN - это шины для управления стеклоподъемниками, кондиционером и т.п. , со скоростью передачи данных 100 Кбит.
Шина данных CAN: РАСШИРЕННЫЕ ВОЗМОЖНОСТИ проведения Диагностики
Так как сигналы с одного датчика (например, датчика температуры, датчика скорости и др.), может использоваться различными системами, то в том случае, если наличие неисправности отображают все использующие данный сигнал системы, неисправным является, как правило, датчик или блок управления, обрабатывающий его сигналы.
Высокий уровень защиты передаваемых данных
Высокий уровень защиты передаваемых данных беспечивается даже при сильных помехах.
При этом обеспечивается высокая скорость передачи данных (до 1 Mbit/s)
За счет чего это достигается:
-
Механизм обнаружения ошибок Механизм исправления ошибок
Распознавание ошибок
Помехи при передаче данных могут приводить к возникновению ошибок. Такие ошибки при передаче данных надо распознавать и устранять. Протокол шины данных CAN различает два уровня распознавания ошибок:
Cyclic-Redundancy-Check:
Frame Check:
Этот механизм проверяет структуру передаваемого фрейма, то есть перепроверяются битовые поля с заданным фиксированным форматом и длина фрейма.
Распознанные функцией Frame Check ошибки обозначаются как ошибки формата.
Механизмы на уровне битов
Bit Stuffing:
Механизм устранения ошибок
ПРИОРИТЕТЫ шины данных CAN
Идентификатор, соответствующий меньшему двоичному числу, имеет более высокий приоритет, и наоборот (чем больше нулей в идентификаторе (битов нулевых) тем больше приоритет) . Протокол шины данных CAN основывается на двух логических состояниях: биты являются или "рецессивными" (логическая "1" - единица), или "доминантными" (логический "О" - ноль).
Если доминантный бит передаётся как минимум одним модулем шины, то рецессивные биты, передаваемые другими модулями, перезаписываются.
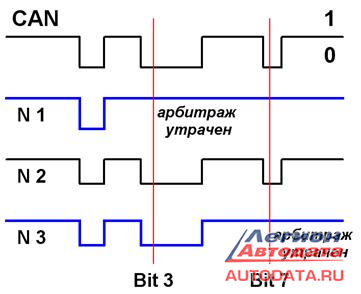
Для примера : Когда несколько блоков управления начинают одновременную передачу данных, то конфликт доступа к шине данных разрешается посредством "побитового арбитража запросов общего ресурса" с помощью соответствующих идентификаторов.
Первый блок управления (N 1) утрачивает арбитраж с 3-го бита.
Третий блок управления (N 3) утрачивает арбитраж с 7-го бита.
Виды существующих шин
(на примере VW, Audi, Opel, Mercedes)
Шина CAN силового агрегата (быстрая шина), позволяющая передавать информацию со скоростью 500 кбит/с. Она служит для связи между блоками управления на линии двигателя и трансмиссии.
Шина CAN системы "Комфорт" (медленная шина), позволяющая передавать информацию со скоростью 100 кбит/с. Она служит для связи между блоками управления, входящими в систему "Комфорт".
Виды шин по классификации Mercedes:
Шина CAN-D – диагностическая шина (используется для диагностики).
В автомобилях, имеющих диагностику по CAN шине, в качестве шлюза всех трёх шин установлен блок ZGW (центральный интерфейс). Это на более современных Мерседесах с 2002 года выпуска.
Цветовая маркировка шин на Mercedes
На рисунках в различного рода руководствах и справочниках, провода шин CAN, для наглядности, могут быть обозначены приблизительно таким образом:

Общими для всех систем является следующее:
- Системы выполняют одинаковые предписания по передаче данных, сформулированные в соответствующем протоколе.
- Для передачи сигналов используются два скрученных между собой провода (Twisted Pair),которые эффективно противостоят внешним помехам (например, такая необходимость существует при их расположении в моторном отсеке).
Области применения шины данных CAN
(применительно к Mercedes)
Для моторного отсека и салона применяются различные шинные системы CAN, которые отличаются друг от друга скоростью передачи данных.
Обмен данными между обеими шинными системами осуществляется через так называемые "межсетевые шлюзы", т.е. блоки управления, подключенные к обеим шинам данных.
CAN-C (шина данных CAN моторного отсека)
В оконечном блоке управления с каждой стороны установлен так называемый согласующий резистор шины данных с сопротивлением 120 Ком, подключённый между обеими проводами шины данных.
Шина данных CAN моторного отсека активирована только при включенном зажигании.
CAN-B (шина данных CAN салона)
Некоторые блоки управления, подключённые к шине данных CAN салона, активируются независимо от включения зажигания (например, система центральной блокировки).
Поэтому шина данных салона должна находиться в режиме функциональной готовности даже при выключенном зажигании (то есть, возможность передачи пакетов данных должна быть обеспечена и при выключенном зажигании).
Для максимально возможного снижения энергопотребления в состоянии покоя шина данных CAN переходит в режим "пассивного ожидания" при отсутствии передаваемых пакетов данных и активируется снова только при последующем доступе к ней.
Топология шины CAN

Она зависит от модели конкретного автомобиля и Производителя.
Например, звездообразная топология запатентованная фирмой Daimler-Benz. Эта топология позволяет уменьшить резонансные проблемы в линии.
CAN контроллеры соединяются с помощью шины, которая имеет как минимум два провода CAN H и CAN L , по которым передаются сигналы при помощи специализированных ИМС приемо-передатчиков. Кроме того, ИМС приемо- передатчиков реализуют дополнительные сервисные функции:
-
Регулировка скорости нарастания входного сигнала путем изменением тока на входе.
Наиболее широкое распространение получили два типа приемоперадатчиков (трансиверов):
Трансиверы, выполненные в соответствии со стандартом
"Fault-Tolerant" приемопередатчики (не чувствительные к повреждениям на шине) позволяют построить высоконадежную малопотребляющую сеть со скоростями передачи данных не выше 125 кбит/c.
ПРАКТИЧЕСКАЯ РАБОТА
Ошибка была такая:


(Эта неисправность – гниение проводов на этом крыле и выход их из строя, является конструктивно-технологической недоработкой фирмы).
Тоже не помогло. И тогда автомобиль был доставлен на эти практические занятия с целью найти и устранить неисправность.
Для поиска неисправности применили два рекомендуемых метода:
-
Проверка шины CAN по сопротивлению
Проверка по сопротивлениям
Шина представляет собой два провода витой пары.
-
Если шина исправна и оконечные блоки подключены, то на шине мы увидим сопротивление 60 Ом (два по 120 в параллель).
Подключенные в параллель блоки мультиметром (по сопротивлению) не контролируются.
В ML350 один из конечных блоков будет моторный, второй, в зависимости от года выпуска, вероятнее всего AAM, EAM или EZS.
Другие проверки
Определение КЗ (короткого замыкания) в шине данных CAN – определенно сложная задача. Как можно поступить:
-
Визуально осмотреть провода с целью выявления и определения внешних повреждений
Отключение блоков
На блоке EGS (управление коробкой) , расположеный справа в ногах у водителя, было, как обычно, обнаружено масло.
Именно масло иногда является причиной неисправности этого блока.
Эта ошибка конструктивная: некачественные уплотнения жгута проводов к соленоидам в коробке АКПП. По жгуту оно и поднимается в электронный блок.
Блок ААМ – тоже оказался исправным.
Кстати, если уж заговорили о нем:
Отключение блоков тоже ничего не дало.
Проверили номера блока, которого заменили – все нормально, хотя тут тоже может быть путаница, так как существуют три варианта спецификаций для заказа:
- номер фирмы Mercedes
Это достаточно важный момент, который нельзя упускать при проведении Диагностики.
Какой можно сделать вывод : причиной неисправности С1020 на данном автомобиле явилась неправильно закодированная комплектация автомобиля.
Как раз наоборот.
Это на бумаге и в этой статье вся работа по определению неисправности уложилась в несколько строчек.
Читайте также: