
Электродвигатели какого типа применяются в качестве стартеров двс
Электродвигатель – устройство для преобразования электроэнергии во вращательное движение вращающейся части электрической машины. Преобразование энергии в двигателях происходит за счет взаимодействия магнитных полей обмоток статора и ротора. Эти электрические машины широко используются во всех отраслях промышленности, в качестве привода электротранспорта и инструментов, в системах автоматизации, бытовой техники и так далее.
Существует множество видов электродвигателей, различающихся по принципу действия, конструкции, исполнению и другим признакам. Рассмотрим основные типы этих электрических машин.
По принципу действия различают магнитоэлектрические и гистерезисные электрические машины. Несмотря на простоту конструкции, высокий пусковой момент, последние не получили широкого распространения. Эти электродвигатели имеют высокую цену, низкий коэффициент мощности, ограничивающие их применение. Подавляющее большинство выпускаемых электродвигателей – магнитоэлектрические.
По типу напряжения питания различают:
- Электродвигатели постоянного тока.
- Двигатели переменного тока.
- Универсальные электрические машины.
По конструкции различают электродвигатели с горизонтально и вертикально расположенным валом. Корме того, электрические машины классифицируют по назначению, климатическому исполнению, степени защиты от попадания влаги и посторонних предметов, мощности и другим параметрам.
Классы электродвигателей:
- Постоянного тока
- Бесщеточные ЕС (электронно-коммутируемые)
- Со щетками
- С последовательным возбуждением
- С параллельным возбуждением
- Со смешанным возбуждением
- С постоянными магнитами
- Переменного тока
- Универсальные
- Синхронные
- Индукционные
- Однофазные
- Трехфазные
Таблица классификации электронных двигателей:
Электродвигатели постоянного тока
Двигатели постоянного тока широко применяются в качестве привода электротранспорта, промышленного оборудования, а также микропривода исполнительных механизмов. Такие электрические машины обладают следующими преимуществами:
- Возможность регулировки частоты вращения путем изменения напряжения в обмотке возбуждения. При этом крутящий момент на валу ДПТ (двигатели постоянного тока) остается неизменным.
- Высокий к.п.д. (коэффициент полезного действия) у машин постоянного тока несколько выше, чем у самых распространенных асинхронных двигателей переменного тока. При неполной нагрузке на валу к.п.д. ДПТ выше на 10-15%.
- Возможность изготовления ДПТ небольших габаритов. Практически все используемые микроприводы рассчитаны на постоянный ток.
- Простота схем управления. Для пуска, реверса и регулирования скорости и момента не требуется сложного электронного оборудования и большого количества аппаратов для коммутации.
- Возможность работы в режиме генератора. Электродвигатели такого типа можно использовать в качестве источников постоянного тока.
- Высокий пусковой момент. ДПТ используют в составе электроприводов кранов, тяговых и грузоподъемных механизмов, где требуется запуск под значительной нагрузкой.
ДПТ различают по способу возбуждения, они бывают:
- С постоянными магнитами. Такие двигатели отличаются малыми габаритами. Основная область их применения – микроприводы.
- С электромагнитным возбуждением.
Электрические машины с электромагнитами такого типа получили самое широкое распространение. Их классифицируют по способу подключения обмотки статора:
- Двигатели с параллельным возбуждением. Обмотки якоря и статора в электрической машине такого типа соединены параллельно. Такие электрические машины не требуют дополнительного источника питания для обмотки возбуждения, скорость вращения ротора практически не зависит от нагрузки. Их используют для привода металлорежущих станков и другого оборудования.
- Электродвигатели с последовательно включенной обмоткой статора. ДПТ этого типа имеют значительный пусковой момент. Их применяют в качестве привода электротранспорта и промышленных установок с необходимостью пуска под нагрузкой.
- Двигатели с независимым возбуждением. Для питания обмотки статора таких электромашин используется независимый источник постоянного тока. ДПТ такого типа отличаются широким диапазоном регулирования скоростей.
- Электрические машины со смешанным возбуждением. Электромагнит возбуждения в таких двигателях поделен на 2 части. Одна из них включена параллельно, вторая последовательно обмотке якоря. Электрические машины такого типа используются в механизмах и оборудовании, где необходим высокий пусковой момент, а также переменная и постоянная скорость при переменном моменте.
Электродвигатели переменного тока
Электрические машины такого типа широко используют для приводов всех типов технологического оборудования, электроинструментов, автоматических регуляторов. По наличию разности между скоростью вращения магнитного поля статора и частотой вращения ротора различают синхронные и асинхронные двигатели.
Асинхронные электродвигатели
Благодаря дешевизне и простоте конструкции электрические машины такого типа получили самое широкое распространение. Их принципиальное отличие – наличие так называемого скольжения. Это разность между частотой вращения магнитного поля неподвижной части электрической машины и скоростью вращение ротора. Напряжение на вращающейся части индуцируется за счет переменного магнитного поля обмоток статора двигателя. Вращение вызывает взаимодействие поля электромагнитов неподвижной части и магнитного поля ротора, возникающего под влиянием наведенных в нем вихревых токов. По особенностям обмоток статора выделяют:
- Однофазные двигатели переменного тока. Двигатели такого типа требуют для пуска наличия внешнего фазосдвигающего элемента. Это может быть пусковой конденсатор или индуктивное устройство. Область применения однофазных двигателей – маломощные приводы.
- Двухфазные электрические машины. Такие двигатели имеют 2 обмотки со смещенными относительно друг друга фазами. Их также используют для бытовых устройств и оборудования, имеющего небольшую мощность.
- Трех- и многофазные электродвигатели. Наиболее распространенный тип асинхронных машин. Электрические двигатели такого типа имеют от 3-х и более обмоток статора, сдвинутых по фазе на определенный угол.
По конструкции ротора асинхронные электрические машины делят на двигатели с короткозамкнутым и фазным ротором.
Обмотка ротора электрических машин первого типа представляет собой несколько неизолированных стержней, выполненных из сплавов меди или алюминия, замкнутых с двух сторон кольцами (конструкция “беличья клетка”). Асинхронные двигатели такого типа обладают следующими преимуществами:
- Достаточно простая схема пуска. Такие электрические машины можно подключать непосредственно к электрической сети через аппараты коммутации.
- Допустимость кратковременных перегрузок.
- Возможность изготавливать электрические машины высокой мощности. Двигатель такого типа не содержит скользящих контактов, препятствующих наращиванию мощности.
- Относительно простое ТО и ремонт. Асинхронные электромашины имеют несложную конструкцию.
- Невысокая цена. Двигатели асинхронного типа стоят дешевле синхронных машин и ДПТ.
Электрические машины с короткозамкнутым ротором имеют свои недостатки:
- Предельная скорость вращения составляет не более 3000 об/мин при входе в синхронный режим.
- Технически сложная реализация регулирования частоты вращения.
- Высокие пусковые токи при прямом запуске.
Электродвигатели с фазным ротором частично лишены недостатков, присущих машинам с ротором конструкции “беличья клетка”. Вращающаяся часть электрической машины такого типа имеет обмотки, соединенные в схему “звезда”. Напряжение подводится к обмотке через 3 контактных кольца, закрепленных на роторе и изолированных от него.
Такие электродвигатели обладают следующими достоинствами:
- Возможность ограничивать пусковые токи при помощи резистора, включенного в цепь электромагнитов ротора.
- Больший, чем у электромашин с короткозамкнутым ротором, пусковой момент.
- Возможность регулировки скорости.
Недостатками таких двигателей являются относительно большие габариты и масса, высокая цена, более сложный ремонт и сервисное обслуживание.
Синхронные двигатели переменного тока
Как и в асинхронных электродвигателях, вращение ротора в синхронных машинах достигается взаимодействием полей ротора и статора. Скорость вращения ротора таких электрических машин равна частоте магнитного поля, создаваемого обмотками статора.
Обмотка неподвижной части двигателя рассчитана на питание от трехфазного напряжения. К электромагнитам ротора подключается постоянное напряжение. Различают явнополюсные и неявнополюсные обмотки. В синхронных двигателях малой мощности используют постоянные магниты.
Запуск и разгон синхронной машины осуществляется в асинхронном режиме. Для этого на роторе двигателя имеется обмотка конструкции “беличья клетка”. Постоянное напряжение подается на электромагниты только после разгона до номинальной частоты асинхронного режима. Синхронные двигатели имеют следующие особенности:
- Постоянная скорость вращения при переменной нагрузке.
- Высокий к.п.д. и коэффициент мощности.
- Небольшая реактивная составляющая.
- Допустимость перегрузки.
К недостаткам синхронных электродвигателей относятся:
- Высокая цена, относительно сложная конструкция.
- Сложный пуск.
- Необходимость в источнике постоянного напряжения.
- Сложность регулировки скорости вращения и момента на валу.
Универсальные двигатели
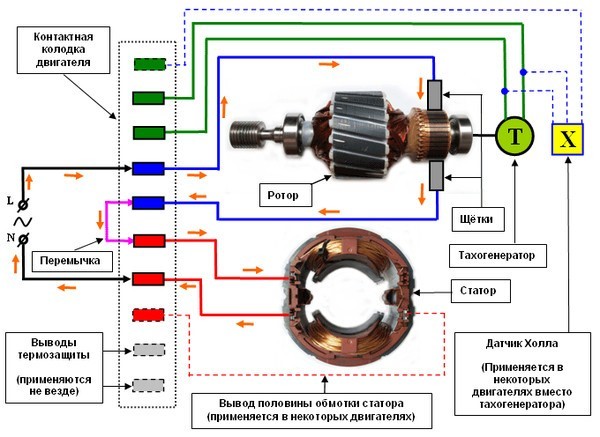
В отдельную группу выделяют универсальные электродвигатели, которые могут работать от сети переменного тока и от источников постоянного напряжения. Они используются в электроинструментах, бытовой технике, а также других маломощных устройствах. Конструкция такой электрической машины принципиально не отличатся от двигателя постоянного тока. Главное отличие – конструкция магнитной системы и обмоток ротора. Магнитная система состоит из изолированных друг от друга секций для снижения магнитных потерь. Обмотка ротора такой машины поделена на 2 части. При питании от переменного тока напряжение подается только на ее половину. Это делается в целях снижения радиопомех, улучшения условий коммутации.
К преимуществам таких машин относятся:
- Высокая скорость вращения. Универсальные электродвигатели развивают скорость до 10 000 об/мин и более.
- Питание от переменного и постоянного напряжения. Двигатели такого типа широко применяют для электроинструментов, имеющих дополнительные аккумуляторные батареи.
- Возможность регулирования скорости без использования дополнительных устройств.
Однако, такие электромашины имеют свои недостатки:
- Ограниченная мощность.
- Необходимость обслуживания коллекторного узла.
- Тяжелые условия коммутации при питании от переменного напряжения из-за наличия трансформаторной связи между обмотками.
- Электромагнитные помехи при подключении к сети переменного тока.
Каждый тип двигателя имеет свои достоинства и недостатки. Выбор электрической машины для привода любого оборудования делается исходя из условий эксплуатации, требуемой частоты вращения, экономической целесообразности, типа нагрузки и других параметров.
ВРемонт.su — ремонт фото видео аппаратуры, бытовой техники, обзор и анализ рынка сферы услуг
| Home Ремонт бытовой техники Статьи Разновидности стартерных электродвигателей, различающиеся по способу возбуждения, и их механические характеристики |
Разновидности стартерных электродвигателей, различающиеся по способу возбуждения, и их механические характеристики

Рис 1 а) с последовательным возбуждением.
В автомобильном электростартере нового поколения электродвигатель не имеет статорных обмоток возбуждения, которые заменены на постоянные магниты, а механический привод дооборудован понижающим планетарным редуктором, который установлен непосредственно в корпусе стартера. Это позволило сделать стартер высоко-оборотистым, легким, малых размеров и более эффективным в работе.
Стартерный электродвигатель
Классический электростартер автомобиля — это устройство, состоящее из электродвигателя (ЭДВ) постоянного тока с последовательной обмоткой возбуждения, который на время пуска двигателя внутреннего сгорания (ДВС) подключается к аккумуляторной батарее (АКБ) с помощью пускового тягового реле (ПТР). Это же реле посредством рычага с вилкой перемещает по оси стартера муфту свободного хода (МСХ) и тем самым механически сочленяет шестерню на валу стартерного электродвигателя непосредственно с венечной шестерней маховика ДВС.
Конструкция автомобильного стартера, при которой вал электродвигателя соединяется прямо с маховиком ДВС, имеет ряд недостатков. Так, передаточное число главного редуктора, состоящего из венечной шестерни маховика и шестерни МСХ, не может быть достаточно высоким. Ограничения накладываются расчетным размером диаметра маховика, а также числом, размером и прочностью зубцов шестерни МСХ. В такой редукторной паре — соотношение зубцов не может быть более 16—18.
От указанных недостатков свободны ЭДВ с независимым (от тока якоря) возбуждением.

Рис 1 б) С независимым возбуждением.
Независимое возбуждение магнитного поля на статоре ЭДВ можно получить тремя способами: обмоткой возбуждения, которая подключена к отдельному от якоря источнику электрической энергии (управляемое независимое возбуждение — рис. 1, б);

Рис 1 в) С параллельным возбуждением обмоткой возбуждения, подключенной параллельно якорю ЭДВ (параллельное возбуждение — рис. 1, в);

Рис 1 д) С возбуждением от постоянного магнита постоянными магнитами на статоре (возбуждение от постоянных магнитов относится к неуправляемому независимому возбуждению — рис. 1, д).
Электродвигатель с питанием обмотки возбуждения от независимого источника (рис. 1, б) в автомобильной системе электростартерного пуска не используется, так как на борту автомобиля один пусковой источник электрической энергии — аккумуляторная батарея.
Электродвигатели с чисто параллельным возбуждением (рис. 1, в) в автомобильных электростартерах неэффективны, так как напряжение АКБ при пуске ДВС в зимнее время (при температуре ниже — 20 °С) резко падает до 8—9 В. При этом намагничивающая сила параллельной обмотки возбуждения, а следовательно и крутящий момент стартера, значительно ослабевают, пуск ДВС становится невозможным. Кроме того, характеристика ЭДВ с параллельным возбуждением жесткая, что недопустимо при низком передаточном соотношении между оборотами стартерного ЭДВ и оборотами коленвала ДВС, так как это может привести к ударным перегрузкам и поломкам в зубцах механического привода.

Рис 1 г) Со смешанным возбуждением.
Однако жесткость характеристики ЭДВ обеспечивает плавность хода стартера, а также ограниченность оборотов холостого хода, и поэтому параллельное возбуждение иногда вводится в ЭДВ классического электростартера дополнительно к последовательному (рис. 1, г). Такое возбуждение обеспечивает ЭДВ усредненную (умеренно жесткую) механическую характеристику и называется смешанным. Используется, например, в стартерах для автомобилей ВАЗ.
Такие стартеры имеют следующие преимущества:
- главное магнитное поле электродвигателя с постоянными магнитами на статоре не зависит ни от тока якоря, ни от падения напряжения АКБ при пуске ДВС.
- система постоянных магнитов на статоре электродвигателя делается многополюсной (не менее шести полюсов), что позволяет заметно уменьшить габариты магнитной системы (постоянные магниты значительно меньше электромагнитов), а следовательно и всего стартера в целом. КПД и обороты стартерного электродвигателя с многополюсным статором также выше.
- сами постоянные магниты выполняются не из сплавов дорогостоящих металлов, а из спекаемых ферритовых порошков с большой коэрцитивной силой, что делает магниты легкими, прочными, технологичными и, как следствие, дешевыми.
- наличие дополнительного понижающего редуктора в электростар-терной системе пуска позволяет оптимально согласовать жесткую механическую характеристику электродвигателя независимого возбуждения с минимальной пусковой частотой вращения коленвала ДВС при максимальной механической нагрузке стартера.
- И наконец, стартерный ЭДВ с независимым возбуждением от постоянных магнитов и с дополнительным редуктором может работать в режиме повышенных оборотов при пуске холодного двигателя, потребляя при этом от АКБ меньший ток по сравнению с классическим стартером. КПД стартерного режима АКБ и надежность пуска ДВС увеличиваются.
Как и любая новая техника, электростартеры с планетарным редуктором и с возбуждением от постоянных магнитов на начальном этапе внедрения обладали некоторыми недостатками: они были значительно дороже классических за счет высокой стоимости постоянных магнитов и планетарного редуктора; в них быстрее изнашивались щетки из-за более высоких оборотов; их работа сопровождалась повышенным шумом.
Современная технология изготовления стартеров нового поколения исключает эти недостатки. Так, постоянные магниты, как уже отмечалось, стали ферритовыми. Главная шестерня планетарного редуктора изготавливается литьем под давлением из термореактивной пластмассы. Пластмассу армируют бронзой, что делает планетарную шестерню прочной, износостойкой, технологичной и дешевой. Остальные детали дополнительного редуктора обычного исполнения. Планетарный редуктор с пластмассовой шестерней не шумит. Быстрый износ коллекторных щеток устранен применением в них более жесткого графита и удалением из него порошковой меди.
Последнее стало возможным за счет понижения величины якорного тока. Уменьшена сила прижатия щеток к коллектору.
Следует однако заметить, что стоимость стартера нового поколения пока еще несколько выше стоимости классического. Но если 25 лет назад разница в цене была около 150 %, то в последнее время она не превышает 50 %.
Электростартер. Виды и устройство. Работа и неисправности
Электростартер – это вспомогательный электрический прибор, предназначенный для запуска двигателя внутреннего сгорания. Он представляет собой двигатель постоянного тока, питающийся от аккумуляторной батареи подзаряжаемой генератором. При подаче питания стартер создает вращательное движение коленвала двигателя внутреннего сгорания, создав тем самым необходимые условия для розжига топлива и дальнейшей стабильной работы цилиндров.
Как работает электростартер
Для запуска двигателя внутреннего сгорания требуется создание оптимальных условий для розжига топливной смеси. Для этого важно раскрутить коленчатый вал до минимально необходимых оборотов, требуемых для воспламенения топлива в цилиндрах. Чтобы раскрутить коленчатый вал применяется сторонний источник механической энергии, в качестве которого и выступает стартер.
По сути он является электрическим двигателем постоянного тока с коллекторно-щеточным узлом. Стартер воздействует на двигатель только в период его запуска. После стабилизации работы он отключается. Специально для этого в устройстве предусматривается механизм управления.
За механическое управление электрического стартера отвечает втягивающее реле. Оно выполняет две функции. В первую очередь реле замыкает электрическую цепь, которая обеспечивает питание электродвигателя. Также оно вводит в зацепление шестерни, передающие вращательное движение на коленвал. Фактически оно выполняет такую же функцию, как коробка передач между колесами и двигателем.
Принцип работы электрического стартера в автотранспорте
При повороте ключа зажигания водителем, выполняется замыкание цепи втягивающего реле. Напряжение от аккумулятора поступает на обмотку реле, в результате чего образовывается сильное магнитное поле. Оно воздействует на якорь, тот сдвигается и реле соответственно втягивается. Зацепленная вилка смещает бендикс (обгонная муфта) по роторному валу. Как следствие шестеренка состыковывается с зубьями маховика.

После срабатывания втягивающее реле прекращает питание цепи. С обратной стороны на нем установлено 2 провода. Один идет для подключения питающего кабеля, а второй передает напряжение на электрический мотор.
Как только происходит срабатывание реле, то якорь втягивается и замыкает пятаки, являющиеся разрывными элементами цепи питания мотора. В результате на двигатель подается напряжение, и якорь двигателя начинает вращаться. В тоже время шестерня бендикса находится в зацеплении, поэтому передаточное усилие заставляет коленчатый вал вращается, двигая тем самым поршня в цилиндрах.
После запуска мотора, коленвал начинает обгонять по скорости вращение стартера. Тогда в устройстве срабатывает обгонная муфта, которая и прекращает контакт с валом. Это позволяет предотвратить механические повреждения обеих систем. В противном случае при продолжении подачи питания два механизма просто противодействовали бы друг другу.
Как только двигатель автомобиля переходит в штатный режим работы и водитель отпускает ключ замка зажигания, то пропадает питание стартера. От этого втягивающее реле срабатывает обратно. Отсутствие магнитного поля приводит к тому, что пружина возвращает якорь в штатное положение, пятаки размыкаются и бендикс спускается на место.
Электростартер, работающий по данной схеме, сейчас считается устаревшей конструкцией, главным недостатком которой выступает значительный вес и размер. Для реализации такой конструкции требовалось использование мощного электродвигателя, способного выдавать высокие тяговые усилия. При этом электромотор должен вращаться медленно. Такие стартеры плохо подходят для современных автомобилей, спецтехники, генераторов и прочих устройств, где требуется их установка.
Электростартер с редуктором
Более современные стартеры оснащаются редуктором. Благодаря этому возможно использование высокооборотистого, но мелкого мотора. Редуктор понижает обороты, переводя их количество в качество. Он увеличивает силу стартера, позволяя создать достаточный крутящий момент для раскручивания коленчатого вала. Такая система не просто компактная, но и экономичная. Она позволяет завести ДВС большее количество раз на одном заряде аккумулятора.

Современные стартеры могут оснащаться различными типами редукторов, но в подавляющем большинстве случаев применяются устройства с так называемой планетарной передачей. Ее достоинством является компактность и надежность. Характерной чертой планетарного редуктора выступает наличие дополнительного вала для установки бендикса. Это исключает прямую связь якоря с бендиксом. Они способны взаимодействовать между собой только через редуктор.
Классическая схема планетарного редуктора:

Основные неисправности электростартеров
Электростартер выступает ремонтопригодным механизмом, в случае неисправности который можно восстановить практически до первоначального рабочего состояния. Поскольку он состоит из вращающихся деталей, для него выпускаются ремкомплекты, в состав которых входят мелкие детали, нуждающиеся в периодической замене. Большинство остальных комплектующих, склонных к поломкам, можно найти в свободной продаже. Однако такие части электростартера как корпус в продаже в новом виде не встречаются. Их можно приобрести для ремонта в б/у состоянии. Отсутствие данных комплектующих обусловлено исключением их износа. Если они и нуждаются в замене, то только по причине нештатной ситуации, к примеру, механического повреждения сильным ударом, что бывает при аварии.
Чаще всего электростартера выходят из строя по причине:
- Износ подшипников.
- Подгорание пятаков.
- Стирание зубьев шестерни.
- Заклинивание якоря.
- Износ и/или заклинивание обгонной муфты.
Перечисленные неисправности относятся к механической части стартера. Большинство из них решаются заменой поврежденной детали. Исключением являются только заклинивание частей механизмов. В таком случае требуется их очистка и смазка. Также простым обслуживанием решается проблема подгорания пятака. Она устраняется механической чисткой.
Более сложными в диагностировании и решении выступают проблемы электрической части. Электростартер может быть неисправен по причине:
Кроме этого неисправность может вызвать износ щеток контактных пластин коллектора. Это определяется по их размеру. По мере износа они стираются и становятся меньше, поэтому со временем перестают доставать до контактных пластин. Конструкция большинства стартеров предусматривает простой механизм их замены, поскольку данная проблема является самой частой.

Неисправности обмотки стартера могут устраняться только специалистом. С помощью специального оборудования возможна перемотка якоря, что обходится дешевле, чем его замена на новый агрегат.
Оптимальный режим работы стартера и диагностирование поломки
Чтобы минимизировать частоту поломок стартера и увеличить его ресурс, требуется придерживаться некоторых правил. В первую очередь при запуске двигателя нельзя передерживать электростартер включенным. В противном случае тот может сгореть от перегрева. Именно это и выступает основной причиной выхода якоря из строя. Обычно на стартерах имеется табличка, на которой указывается рекомендуемая максимальная длина работы и частота перезапусков.
В большинстве случаев если двигатель не запускается больше 5 сек с момента начала работы стартера, то это говорит об неисправности последнего. Исключением может быть только сильный мороз, при котором топливо в двигателе плохо воспламеняется. Если дело именно в этом, то не стоит крутить стартер подолгу, чтобы он не сгорел. В таком случае у дизельных моторов нужно лучше прогреть свечи, а в бензиновых применить специализированную стартовую аэрозольную жидкость для пуска холодных двигателей.
Плохой запуск ДВС может быть связан не только с плохой работой стартера, но и множеством других причин:
- Недостаточный заряд аккумулятора.
- Поломка двигателя.
- Отсутствие подачи топлива.
- Засорение системы выхлопа.
Однако по определенным признакам можно без диагностики определить, что неисправен именно стартер. Говорить о его поломки могут:
- Задержка в работе после поворота ключа зажигания.
- Характерный треск.
- Слышен звук запуска электродвигателя, не сопровождаемый вращением коленвала ДВС.
- Полное отсутствие реакции на поворот ключа зажигания.
- Стартер не отключается после запуска ДВС.
В целом уход за электростартером подразумевает соблюдение 2-х основных правил:
- Делать перерывы между безуспешными пусками мотора не менее 30 сек.
- Не применять электростартер для движения авто.
Запуск стартера при включенной передаче автомобиля приводит к его движению. Этим часто пользуются при неисправности мотора или отсутствии топлива, чтобы продвигаться вперед. Такой способ движения быстро истощает аккумуляторную батарею, а кроме этого перегревает стартер. Таким способом можно вполне безопасно проехать несколько метров, но не более.
Хотя рекомендуемая пауза между поворотами ключа в замке зажигания составляет 30 сек, но в жару этот период лучше увеличивать. Короткая пауза не проблема если стартер запустил мотор со второй попытки, но при множественных повторениях подряд это повлечет сгорание якоря.
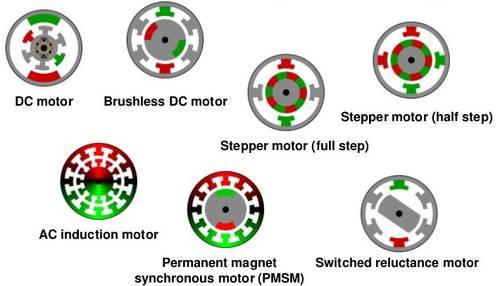
В прошлых статьях был рассмотрен принцип работы синхронного и асинхронного электродвигателей, а также рассказано, как ими управлять. Но видов электродвигателей существует гораздо больше! И у каждого из них свои свойства, область применения и особенности.
В этой статье будет небольшой обзор по разным типам электродвигателей с фотографиями и примерами применений. Почему в пылесос ставятся одни двигатели, а в вентилятор вытяжки другие? Какие двигатели стоят в сегвее? А какие двигают поезд метро?

С этим двигателем все должны быть знакомы с детства, потому что именно этот тип двигателя стоит в большинстве старых игрушек. Батарейка, два проводка на контакты и звук знакомого жужжания, вдохновляющего на дальнейшие конструкторские подвиги. Все ведь так делали? Надеюсь. Иначе эта статья, скорее всего, не будет вам интересна. Внутри такого двигателя на валу установлен контактный узел – коллектор, переключающий обмотки на роторе в зависимости от положения ротора. Постоянный ток, подводимый к двигателю, протекает то по одним, то по другим частям обмотки, создавая вращающий момент. Кстати, не уходя далеко, всех ведь, наверное, интересовало – что за желтые штучки стояли на некоторых ДПТ из игрушек, прямо на контактах (как на фото сверху)? Это конденсаторы – при работе коллектора из-за коммутаций потребление тока импульсное, напряжение может также меняться скачками, из-за чего двигатель создает много помех. Они особенно мешают, если ДПТ установлен в радиоуправляемой игрушке. Конденсаторы как раз гасят такие высокочастотные пульсации и, соответственно, убирают помехи.

Почему ДПТ не делают мощнее? Главная проблема всех ДПТ, а в особенности ДПТ большой мощности – это коллекторный узел. Скользящий контакт сам по себе является не очень хорошей затеей, а скользящий контакт на киловольты и килоамперы – и подавно. Поэтому конструирование коллекторного узла для мощных ДПТ – целое искусство, а на мощности выше мегаватта сделать надежный коллектор становится слишком сложно (рекорд — 12,5МВт).
В потребительском качестве ДПТ хорош своей простотой с точки зрения управляемости. Его момент прямо пропорционален току якоря, а частота вращения (по крайней мере холостой ход) прямо пропорциональна приложенному напряжению. Поэтому до наступления эры микроконтроллеров, силовой электроники и частотного регулируемого привода переменного тока именно ДПТ был самым популярным электродвигателем для задач, где требуется регулировать частоту вращения или момент.
Также нужно упомянуть, как именно в ДПТ формируется магнитный поток возбуждения, с которым взаимодействует якорь (ротор) и за счет этого возникает вращающий момент. Этот поток может делаться двумя способами: постоянными магнитами и обмоткой возбуждения. В небольших двигателях чаще всего ставят постоянные магниты, в больших – обмотку возбуждения. Обмотка возбуждения – это еще один канал регулирования. При увеличении тока обмотки возбуждения увеличивается её магнитный поток. Этот магнитный поток входит как в формулу момента двигателя, так и в формулу ЭДС. Чем выше магнитный поток возбуждения, тем выше развиваемый момент при том же токе якоря. Но тем выше и ЭДС машины, а значит при том же самом напряжении питания частота вращения холостого хода двигателя будет ниже. Зато если уменьшить магнитный поток, то при том же напряжении питания частота холостого хода будет выше, уходя в бесконечность при уменьшении потока возбуждения до нуля. Это очень важное свойство ДПТ. Вообще, я очень советую изучить уравнения ДПТ – они простые, линейные, но их можно распространить на все электродвигатели – процессы везде схожие.

Еще более распространенным, чем коллекторные двигатели, является асинхронный двигатель. Только распространен он в основном в промышленности – где присутствует трехфазная сеть. Про принцип его работы написана отдельная статья. Если кратко, то его статор – это распределенная двухфазная или трехфазная (реже многофазная) обмотка. Она подключается к источнику переменного напряжения и создает вращающееся магнитное поле. Ротор можно представлять себе в виде медного или алюминиевого цилиндра, внутри которого находится железо магнитопровода. К ротору в явном виде напряжение не подводится, но оно индуцируется там за счет переменного поля статора (поэтому двигатель на английском языке называют индукционным). Возникающие вихревые токи в короткозамкнутом роторе взаимодействуют с полем статора, в результате чего образуется вращающий момент.
Минус асинхронного двигателя по сравнению с ДПТ в том, что его сложно регулировать. Асинхронный электродвигатель – это двигатель переменного тока. Если асинхронному двигателю просто понизить напряжение, не понизив частоту, то он несколько снизит скорость, да. Но у него увеличится так называемое скольжение (отставание частоты вращения от частоты поля статора), увеличатся потери в роторе, из-за чего он может перегреться и сгореть. Можно представлять это себе как регулирование скорости движения легкового автомобиля исключительно сцеплением, подав полный газ и включив четвертую передачу. Чтобы правильно регулировать частоту вращения асинхронного двигателя нужно пропорционально регулировать и частоту, и напряжение. А лучше и вовсе организовать векторное управление, как более подробно было описано в прошлой статье. Но для этого нужен преобразователь частоты – целый прибор с инвертором, микроконтроллером, датчиками и т.п. До эры силовой полупроводниковой электроники и микропроцессорной техники (в прошлом веке) регулирование частотой было экзотикой – его не на чем было делать. Но сегодня регулируемый асинхронный электропривод на базе преобразователя частоты – это уже стандарт-де-факто.

Про принцип работы синхронного двигателя также была отдельная статья. Синхронных приводов бывает несколько подвидов – с магнитами (PMSM) и без (с обмоткой возбуждения и контактными кольцами), с синусоидальной ЭДС или с трапецеидальной (бесколлекторные двигатели постоянного тока, BLDC). Сюда же можно отнести некоторые шаговые двигатели. До эры силовой полупроводниковой электроники уделом синхронных машин было применение в качестве генераторов (почти все генераторы всех электростанций – синхронные машины), а также в качестве мощных приводов для какой-либо серьезной нагрузки в промышленности.

Конструктивно это самый простой двигатель и по принципу действия похож на некоторые шаговые двигатели. Ротор – зубчатая железка. Статор – тоже зубчатый, но с другим числом зубцов. Проще всего принцип работы поясняет вот эта анимация:
Следующая проблема – это пульсации вращающего момента. В силу зубчатой структуры и импульсного тока момент редко получается стабильным – чаще всего он пульсирует. Это несколько ограничивает применимость двигателей для транспорта – кому хочется иметь пульсирующий момент на колесах? Кроме того, от таких импульсов тянущего усилия не очень хорошо себя чувствуют подшипники двигателя. Проблема несколько решается специальным профилированием формы тока фазы, а также увеличением количества фаз.
Это совсем другой тип двигателя, отличающийся по принципу действия от обычного ВИД. Исторически известны и широко используются вентильно-индукторные генераторы такого типа, применяемые на самолетах, кораблях, железнодорожном транспорте, а вот именно двигателями такого типа почему-то занимаются мало.
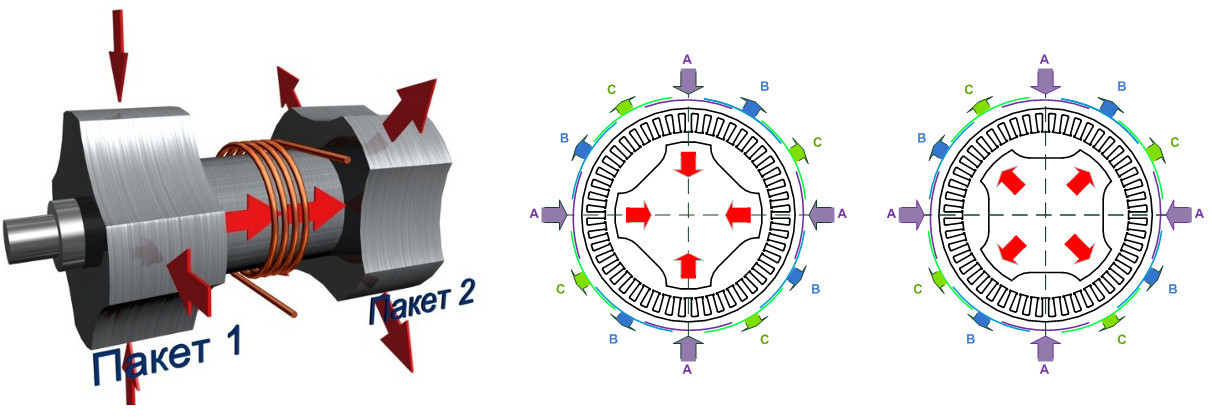
На рисунке схематично показана геометрия ротора и магнитный поток обмотки возбуждения, а также изображено взаимодействие магнитных потоков статора и ротора, при этом ротор на рисунке установлен в согласованное положение (момент равен нулю).
Упрощенно принцип работы можно описать следующим образом: ротор стремится повернуться в такое положение, при котором направления магнитного потока в статоре (от токов статора) и роторе (от тока возбуждения) совпадут. При этом половина электромагнитного момента образуется в одном пакете, а половина – в другом. Со стороны статора машина подразумевает разнополярное синусоидальное питание (ЭДС синусоидальна), электромагнитный момент активный (полярность зависит от знака тока) и образован за счет взаимодействия поля, созданного током обмотки возбуждения с полем, созданного обмотками статора. По принципу работы эта машина отлична от классических шаговых и SRD двигателей, в которых момент реактивный (когда металлическая болванка притягивается к электромагниту и знак усилия не зависит от знака тока электромагнита).

Кроме того, ВИД НВ можно создавать многофазным и многосекционным, аналогично тому, как это делается в ВИД СВ. При этом фазы оказываются несвязанными друг с другом магнитными потоками и могут работать независимо. Т.е. получается как будто бы несколько трехфазных машин в одной, к каждой из которых присоединяется свой независимый инвертор с векторным управлением, а результирующая мощность просто суммируется. Координации между преобразователями при этом не требуется никакой – только общее задание частоты вращения.
Минусы этого двигателя тоже есть: напрямую от сети он крутиться не может, так как, в отличие от классических синхронных машин, ВИД НВ не имеет асинхронной пусковой обмотки на роторе. Кроме того, он сложнее по конструкции, чем обычный ВИД СВ (SRD).

К сожалению, двумя словами здесь не обойтись. И общими выводами про то, что у каждого двигателя свои достоинства и недостатки – тоже. Потому что не рассмотрены самые главные качества – массогабаритные показатели каждого и типов машин, цена, а также их механические характеристики и перегрузочная способность. Оставим нерегулируемый асинхронный привод крутить свои насосы напрямую от сети, тут ему конкурентов нет. Оставим коллекторные машины крутить дрели и пылесосы, тут с ними в простоте регулирования тоже потягаться сложно.
Давайте рассмотрим регулируемый электропривод, режим работы которого – длительный. Коллекторные машины здесь сразу исключаются из конкуренции по причине ненадежности коллекторного узла. Но остались еще четыре – синхронный, асинхронный, и два типа вентильно-индукторных. Если мы говорим о приводе насоса, вентилятора и чего-то похожего, что используется в промышленности и где масса и габариты особо не важны, то здесь из конкуренции выпадают синхронные машины. Для обмотки возбуждения требуются контактные кольца, что является капризным элементом, а постоянные магниты очень дороги. Конкурирующими вариантами остаются асинхронный привод и вентильно-индукторные двигатели обоих типов.
Если синхронная машина в три раза меньше и легче – это не значит, что для электротяги она подходит лучше. Всё дело в отсутствии регулировки потока постоянных магнитов. Поток магнитов определяет ЭДС машины. На определенной частоте вращения ЭДС машины достигает напряжения питания инвертора и дальнейшее повышение частоты вращения становится затруднительно. Тоже самое касается и повышения момента. Если нужно реализовать больший момент, в синхронной машине нужно повышать ток статора – момент возрастет пропорционально. Но более эффективно было бы повысить и поток возбуждения – тогда и магнитное насыщение железа было бы более гармоничным, а потери были бы ниже. Но опять же поток магнитов повышать мы не можем. Более того, в некоторых конструкциях синхронных машин и ток статора нельзя повышать сверх определенной величины – магниты могут размагнититься. Что же получается? Синхронная машина хороша, но только лишь в одной единственной точке – в номинальной. С номинальной частотой вращения и номинальным моментом. Выше и ниже – всё плохо. Если это нарисовать, то получится вот такая характеристика частоты от момента (красным):


Поэтому синхронная машина хороша там, где большого диапазона регулирования не требуется. Например, в сегвее, где скорость с точки зрения безопасности может быть ограничена на 30км/ч (или сколько там у него?). А еще синхронная машина идеальна для вентиляторов: у вентилятора сравнительно мало изменяется частота вращения, от силы раза в два – больше особо нет смысла, так как воздушный поток ослабевает пропорционально квадрату скорости (примерно). Поэтому для небольших пропеллеров и вентиляторов синхронная машина – это то, что нужно. И как раз она туда, собственно, успешно ставится.
Тяговую кривую, изображенную на рисунке синим цветом, испокон веков реализуют двигатели постоянного тока с регулируемым возбуждением: когда ток обмотки возбуждения изменяют в зависимости от тока статора и частоты вращения. При увеличении частоты вращения уменьшается и ток возбуждения, позволяя машине разгоняться выше и выше. Поэтому ДПТ с независимым (или смешанным) управлением возбуждением классически стоял и до сих пор стоит в большинстве тяговых применений (метро, трамваи и т.п.). Какая же электрическая машина переменного тока может с ним поспорить?
А теперь ВИПы. Что могут они? Какая тяговая характеристика у них? Про ВИД СВ я точно сказать не могу – это по своему принципу работы нелинейный двигатель, и от проекта к проекту его механическая характеристика может сильно меняться. Но в целом он скорее всего лучше асинхронного двигателя в плане приближения к желаемой тяговой характеристике с постоянством мощности. А вот про ВИД НВ я могу сказать подробнее, так как мы на фирме им очень плотно занимаемся. Видите вон ту желаемую тяговую характеристику на рисунке выше, которая нарисована синим цветом, к которой мы хотим стремиться? Это на самом деле не просто желаемая характеристика. Это реальная тяговая характеристика, которую мы по точкам по датчику момента сняли для одного из ВИД НВ. Так как ВИД НВ имеет независимое внешнее возбуждение, то его качества наиболее приближены к ДПТ НВ, который тоже может сформировать такую тяговую характеристику за счет регулирования возбуждения.
Так что же лучше всего в итоге для электротяги? Какой двигатель самый лучший?
Понятия не имею. Все плохие. Надо изобретать дальше. Но мораль статьи такова – если вы хотите сравнить между собой разные типы регулируемого электропривода, то нужно сравнивать на конкретной задаче с конкретной требуемой механической характеристикой по всем-всем параметрам, а не просто по мощности. Также в этой статье не рассмотрены еще куча нюансов сравнения. Например, такой параметр как длительность работы в каждой из точек механической характеристики. На максимальном моменте обычно ни одна машина не может работать долго – это режим перегрузки, а на максимальной скорости очень плохо себя чувствуют синхронные машины с магнитами – там у них огромные потери в стали. А еще интересный параметр для электротяги – потери при движении выбегом, когда водитель отпустил газ. Если ВИПы и асинхронные двигатели будут крутиться как болванки, то у синхронной машины с постоянными магнитами останутся почти номинальные потери в стали из-за магнитов. И так далее, и так далее…
Поэтому нельзя вот так просто взять и выбрать лучший электропривод.
UPD:
Обобщая замечания в комментариях, необходимо дополнить некоторые важные, как оказалось, вещи, которые я изначально опустил как маловажные.
1. Асинхронные двигатели до эры преобразователей частоты регулировали за счет применения так называемого фазного ротора — когда ротор делался в виде обмотки, а не беличьей клетки, а через контактные кольца (как у синхронной машины) фазы ротора выводились наружу. Включая в цепь ротора резисторы можно было мягко пускать АД и безопасно регулировать частоту вращения, изменяя сопротивление. Проблема в том, что очень много энергии при этом терялось в резисторах — иногда до половины от подводимой к приводу мощности.
2. В статье не упомянуты синхронные реактивные машины и их совмещение с синхронными машинами с постоянными магнитами. Если сделать ротор синхронной машины с магнитами явнополюсным — например таким, как нарисован ротор SRD двигателя на gif анимации, то развиваемый момент может быть не только активным, но и реактивным — как у SRD. Подбирая оптимальное сочетание активного и реактивного момента можно частично исключить проблемы классической синхронной машины с магнитами, значительно расширив диапазон работы с постоянством мощности. Получается некий гибрид реактивной машины и синхронной с магнитами.
Какие бывают электродвигатели, сегодня стоит знать каждому автомобилисту. И не только из-за увеличения популярности электромобилей. Ведь электромоторы есть на борту всех современных автомобилей.
Итак, какие бывают электродвигатели? Один из стереотипов состоит в том, что все они простые. Если сравнивать с двигателями внутреннего сгорания, это можно считать правдой. Хотя бы потому, что электродвигатель имеет гораздо меньше движущихся деталей, и требования к материалам, технологиям и точности их изготовления намного ниже.
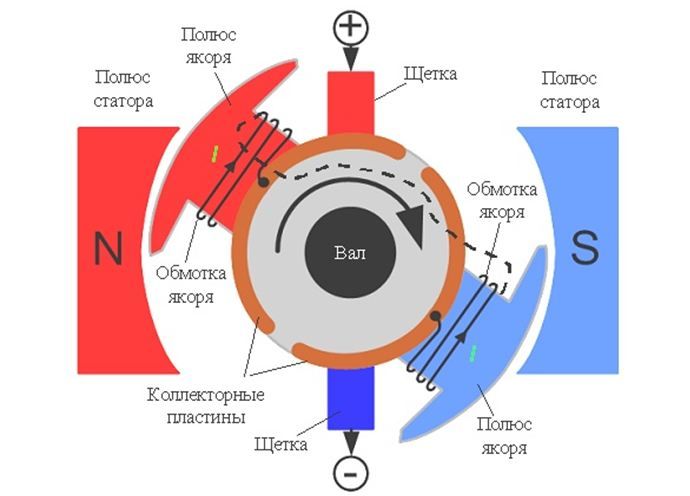
Так работает простейший двигатель постоянного тока – полюса ротора (якоря) и статора отталкиваются друг от друга, вращая вал
Принцип действия
Если в привычном нам ДВС коленвал вращается благодаря энергии расширяющихся газов, которые толкают поршень, то вал электродвигателя вращается благодаря явлению магнитной индукции – силовым полям, которые возникают около проводников с электрическим током. Чтобы сделать эти поля сильными и управляемыми, проводники собраны в обмотки, размещенные на статоре (неподвижная часть электромотора) и роторе (он же якорь, подвижная, вращающаяся часть).
Упрощенно говоря, при подаче напряжения на клеммы двигателя на его статоре и роторе возникают магнитные поля. Они отталкиваются друг от друга, заставляя ротор смещаться относительно статора – проворачиваться. Благодаря наличию коллектора (об этом ниже) или переменному току (и об этом ниже), поле одной из обмоток – ротора или статора – также начинается вращаться, “догоняя” второе из полей. Поэтому ротор вращается до тех пор, пока не будет отключена одна из обмоток и вокруг нее не исчезнет магнитное поле.
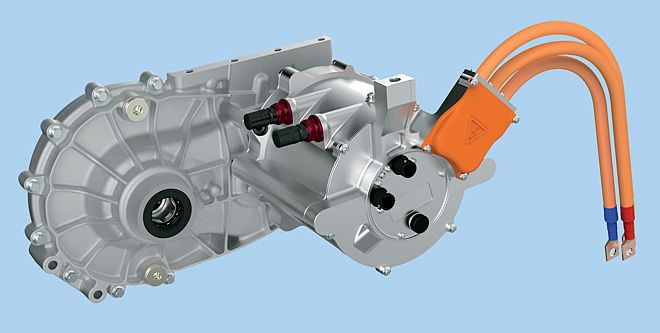
Двигатель переменного тока устроен очень похоже. Но в автомобилях “переменка” используется только в тяговых электродвигателях
Как ДВС делятся на бензиновые и дизельные, так электромоторы делятся на моторы переменного и постоянного тока. Отличия довольно существенные, хотя суть одна: вал ротора, с которого снимается нагрузка, вращается благодаря взаимодействию магнитных полей ротора и статора. Тип тока (постоянный или переменный) влияет на способ управления оборотами, смену направления вращения, эксплуатационные и тягово-скоростные характеристики электромотора.
Такие миниатюрные моторчики постоянного тока применяются не только в игрушках, но и в сервоприводах настоящих автомобилей. Естественно, с редуктором и соответствующего качества
Поскольку в 12-вольтной сети обычного автомобиля используется постоянный ток, то и двигатели на его борту – постоянного тока. Это в первую очередь мощный (иногда более 1 л.с.) электромотор стартера, привод электроусилителя руля, “движки”, приводящие во вращение вентиляторы радиатора и климатической установки, стеклоочистители. Маленькие моторчики спрятаны в актуаторах центрального замка, в приводах зеркал, сервомеханизмах регулировках сидений и руля, в насосе омывателя.
Достоинства электродвигателей постоянного тока автомобильного назначения – в компактности и большом крутящем моменте с самых малых оборотов, недостатки – в ограниченной мощности и моменте, а также в наличии коллекторно-щеточного узла, который имеет ограниченный ресурс.

Более мощные электродвигатели постоянного тока приводят в действие стеклоочистители, вентиляторы климата и радиаторов
Двигатели переменного тока обычно применяются там, где нужна большая мощность и высокая надежность. Эти электрические машины обычно конструктивно проще и долговечнее агрегатов постоянного тока. Именно такие двигатели используются как тяговые в большинстве электромобилей и гибридах. Правда, чтобы запитать двигатель переменного тока от батареи, на борту нужен специальный преобразователь тока – непростой и недешевый инвертор, но его применение оправдано.
По принципу работы моторы переменного тока бывают синхронными и асинхронными. Для рядового пользователя это уже высокие материи, скажем только, что асинхронные моторы на электромобилях применяют из-за простоты управления его оборотами.
Тяговые моторы электромобилей обычно работают на “переменке”, имеют возбуждение от постоянного магнита и относятся к асинхронному типу
Кроме того, одна электрическая машина переменного тока есть и в каждом обычном автомобиле – это генератор. По конструкции он аналогичен электродвигателю, только преобразует энергию, образно говоря, в обратную сторону – механическую в электрическую, а не наоборот, как это делает электродвигатель. Чтобы согласовать ток такого генератора с автомобильной бортовой сетью, применяется встроенный выпрямитель.
На практике: что, где, как
Несмотря на имидж простых и неприхотливых, электромоторы можно отнести к узлам, которые беспокоят автовладельцев. Требует внимания стартер – как минимум очистки коллектора и замены щеток, реже – замены подшипников. Распространенная неисправность – отказ моторчика печки, на неновых машинах часто подводит и электродвигатель вентилятора радиатора. Электродвигатель стеклоочистителя, часто имеющий статор с постоянными магнитами, боится перегрева (например, если дворники примерзли к стеклу) – из-за этого магнит теряет свои свойства, и дворники становятся “медленными”.
Дверные приводы замков, в особенности не штатные, а уставленные вместе с сигнализацией, тоже со временем “перегорают”. Увы, большинство используемых в автомобиле электродвигателей постоянного тока не принято ремонтировать, их просто заменяют новыми. Исключение составляет стартер, который весьма недешев.

Шток актуатора дверного замка приводится в действие небольшим моторчиком постоянного тока – через редуктор и электронный блок
Генератор переменного тока также требует обслуживания. У него есть щетки, которые подают ток на обмотку возбуждения, но поскольку работают они не по коллектору, а по гладким контактным кольцам, проблем с этим узлом меньше. Подшипники генератора обычно подлежат замене. Распространенная проблема – падение напряжения в бортовой сети из-за перегоревшего диода выпрямителя генератора.
Тяговые электромоторы гибридов и “электричек” обслуживают и ремонтируют в условиях фирменных СТО. Причем нужно быть готовым к тому, что из-за связанных с высоким напряжением рисков электромеханики запросят завышенный гонорар.
Читайте также: