
Raspberry pi вместо магнитолы
Появление одноплатного компьютерного созданного усилиями специалистов Кембриджского университета в 2006 году привело к созданию полноценной версии ПК Raspberry Pi в 2012 году. Серийное производство позволило обеспечивать рынок универсальными одноплатными ПК по доступной стоимости.
Изначально Raspberry Pi планировался, как бюджетное решение для развивающихся стран. Сфера применения устройства с течением времени разрослась и увеличилась. Оценили по достоинству возможности мини-компьютера многие умельцы, занимающиеся созданием оригинальных компьютерных устройств. Размеры Raspberry Pi не превышают размеров обыкновенной пачки сигарет. Отдельного внимания заслуживает создание CarPC на Raspberry Pi. Уникальный компьютер для автомобиля. Отличается высокой производительностью и широким функционалом.
Миниатюрные размеры мини-ПК дали возможность установить его в салон автомобиля. Бортовой компьютер CarPC представляет собой специальный автомобильный ПК. Позволяет воспроизводить любой медиаконтент, распознавать OBD-II коды подключаемого диагностического оборудования, работать в качестве навигатора и даже монитора для задней камеры.
Всегда есть возможность приобрести готовое устройство на базе операционной системы Андроид, стоимость будет в разы выше. Современный и доработанный CarPC на Raspberry Pi отличается высоким уровнем производительности и может использоваться для выполнения широкого спектра задач.
Преимуществом использования CarPC является возможность изменения интерфейса и настроек пользователем в любое удобное время. Оптимальный вариант для любителей кастомизации. Можно изменить всё начиная от технического функционала и закачивания установкой новых приложений.

Почему выбирают CarPC на Raspberry Pi?
Мини-ПК для автомобиля поддерживает использование сенсорного дисплея. Задействует минимальные ресурсы и добивается высокой производительности. Поддерживает использование огромного числа программ и множества дополнений. Водитель способен сосредоточиться сугубо на вождении не отвлекаясь по пустякам.
Что включает в себя система CarPC:
1.Операционная система Linux Debian, поддерживающая работу сенсорного экрана.
2.Сенсорный монитор с поддержкой мыши.
3.Популярные медиаприложения (сервисы электронной почты, социальные сети, интернет-радио, Ютуб и многое другое). Система способна воспроизводить любые форматы видео и аудио файлов.
4.Системой можно управлять при помощи использования мобильных гаджетов.
5.Возможность использования навигации в режиме реального времени. Лучший способ сориентироваться в незнакомой местности.
7.Автоматическое обновление времени в зависимости от текущего часового пояса.
8.Телефонные звонки с функцией идентификации собеседника в автоматическом режиме.
9.Сенсорный экран отключается автоматически при начале вождения автомобиля.
10.Возможность диагностики основных автомобильных систем.
Система CarPC на Raspberry Pi обеспечивает создание полноценной мультимедийной системы в автомобиле по доступной стоимости.

Всем привет, решил написать тут немного забегая вперед…
так как, без дела сидеть не мое, а последняя плата заказанная на заводе где то застряла.
Ну не беда и без нее пока что нашел чем занять свои руки.
Всё что было сделано до этого можно посмотреть в (1 части )
Начнем с того, что я как-то оказался у рынка ЮНОНА, ну не заехать туда было глупо к тому же меня мучали мысли где же я достану радиатор подешевле, да еще и под мои размеры которые должны быть 75*170*40.
В итоге, нашел радиатор размерами 100*170*40 за 350р -болгарка мне в помощь!)

Отпилил кусок который был лишним, и знаете ?! это было довольно непросто!
Так же купил сверла и метчик на M3 чтобы все прикрутить к радиатору.
Отпилил, разметил, просверлил, нарезал резьбу и начал прикручивать все на свои места и получилось вот что:

Все транзисторы и микросхемы TDA прикрутил через диэлектрические прокладки чтоб они не соединялись с радиатором!

С задней стенкой магнитолы тоже не обошелся без очумелых ручек.

Прикрутил ее к радиатору болтами.

В итоге стало все это выглядеть так:

В низу оставлено место для выходов USB и штатных разъемов.

Их я тоже уже отпаял для установки на новую плату.


Еще забыл сказать, что поменял кондеры на входе на пленку.

Так идем дальше, я уже довольно давно знаю и работаю с Raspberry Pi и встречал много всяких экранов к этому компьютеру. Но все они либо выглядят неочень, либо работают через одно место поэтому выбор пал на официальный 7'' дисплей, да и размеры у него прям как надо!
вот сей чудо:



Он имеет емкостной сенсор и подключается через стандартный разъем в малину, а качество изображения по сравнению с остальными намного лучше, например, тем что у него хороший угол обзора! После его покупки я не мог спокойно сидеть на стуле, не узнав как он будет выглядеть в панельке от 2din магнитолы и подойдут ли все размеры. Открыл всеми любимое авито и в руках оказалась вот такая переходная рамка.

Скажу что, от ее качества я был в ужасе, так что ребята кто предложит(или продаст, отдаст) мне другую примерно таким же окном и без этой стремной серой сабли на верху — получит огромный плюс к карме!
Но больше выбрать было не из чего поэтому как то так …
Первая задумка была установить экран снаружи, таким образом он отлично подходил в окно и был на одной плоскости с лицевой панелью. Подумав что скоро лето, солнце блики решил его углубить во внутрь
прихватив на клей B7000 который отлично подходит для таких задач (клеить стекло к пластмассе и в случаи косяков его можно очистить)
вышло я думаю не плохо)

фотки выключенного и поближе сделаю позже

Временно прикрутил малинку для проверки

На этом пока что все!
Приходится делить все на части чтоб как можно подробнее и не о чем не забыв написать,
так что скоро продолжение !)
Всем пока.

Open source сельскохозяйственный робот

Выращивание культурных растений, пригодных в пищу, становится все более сложным делом. Растений требуется больше, ухода, соответственно, тоже. Сейчас фермеры во многих странах автоматизируют сельское хозяйство, поскольку вести его становится все сложнее, если речь идет о людях.
Сам проект не такой уж и новый, но его не так давно проапгрейдили. Разработчики добавили систему аварийного торможения, которая позволяет очень быстро остановить робота. Кроме того, появилась еще и усовершенствованная навигационная система, которая позволяет роботу перемещаться по сложным маршрутам. Ну и третье важное обновление — режим симуляции, который позволяет запускать программное обеспечение робота внутри Docker-контейнера и тестировать, не задействуя физически самого робота.
Порт Doom на Pi Pico
Казалось бы, игровая система на базе микроконтроллера? Но да, это возможно, со специальным портом Doom, собранного как раз под эту систему. В целом, Doom уже где только не запускали, включая программируемые калькуляторы, умные часы и даже тест для беременности (впрочем, после демонстрации выяснилось, что тест был модифицирован специальным образом).
Ну а теперь вот разработчики решили запустить игру на Pico.
Кстати, двухъядерный процессор Pico рендерит игру, а вот GPIO задействованы для возможности подключения до четырех игроков в многопользовательском режиме. Технические подробности проекта (все) доступны на GitHub
Здесь используется специализированный метод сжатия изображения WHD, что означает «Where’s Half the Data. Он в состоянии сжимать файл на 57%, попутно перекодируя звук. Полученный исполняемый файл помещается в 256 КБ ОЗУ Pico с 34 КБ в запасе, что позволяет использовать шесть слотов для сохранения игры.
По словам разработчика, которого зовут Graham Sanderson, одноплатники способные и на большее. Например, тот же Adafruit's Feather RP2040 позволяет спокойно запустить и играть в Doom II и Ultimate Doom. Конечно, тоже специальным образом адаптированные.
PCB UV-система

Фотография этой системы для изготовления печатных плат уже публиковалась на Хабре, автор ее тоже есть здесь, если у него будет желание и возможность, то, надеемся, он сможет рассказать подробности в комментариях. Система просто шикарная, она позволяет создавать прототипы печатных плат для любых видов электроники.
По словам автора, он реализовал проект для того, чтобы иметь возможность оперативно выполнять работы по прототипированию плат. Итоговый результат на фото — он получил название Medusa. Девайс работает на Raspberry Pi 4 и использует
дисплей 2K.

- Понижающий модуль 5В (5А).
- Светодиод Cree UV 10 Вт + драйвер.
- 3 Вт красный светодиод + ШИМ-драйвер.
- Экран 2K с драйвером HDMI.
- Arduino pro — датчик температуры и светодиоды ws28.
- Светодиоды WS28 для индикатора выполнения.

Еще один крайне любопытный проект, который определенно понравится любителям астрономии. Он позволяет задавать поиск звезды и находит удаленное светило, которое может находится в тысячах световых лет от Земли, по введенным пользователем данных.
Называется проект Galilego, и несмотря на то, что собран он из Lego (не обычного, а Mindstorms), у него очень точная система позиционирования.

Разработчик с ником EldenGoat использовал набор Lego Mindstorms Robot Inventor 51515 для сборки корпуса. В этом проекте применяется камера HD с разрешением 12,3 МП, которая идеально подходит для съемки звезд, расположенных на невообразимых расстояниях. Он также включает в себя встроенный компас и полностью портативный благодаря аккумулятору емкостью 10000 мАч 3,7 В.
Оптоволоконный дисплей на базе Raspberry Pi
У разработчика ElliotMade получилось создать отличную оптоволоконную систему для вывода разноцветных движущихся изображений на специализированный пиксельный дисплей. Практического смысла он не несет, но в качестве декоративного элемента — просто мечта.
Raspberry Pi управляет здесь выводом заданного пользователем изображения на экран, и получается действительно эффектно.
Большинство деталей, из которых собран проект, можно распечатать на 3D-принтере, вырезать при помощи лазера или изготовить еще каким-либо образом. Дисплей состоит из трех пластин, одна из которых служит базой для всей системы. Вторая — поддерживает светодиодную матрицу. Ну а передняя пластина удерживает оптоволокна таким образом, чтобы и получился дисплей.

Image: Bringing its A game: new 2018 Mercedes A-class hatch revealed – CAR Magazine
Интернет вещей – это не призрак далекого будущего, а вполне реализуемая концепция настоящего. Начиная от лампочек и завершая домашними голосовыми ассистентами – все эти устройства уже имеют доступ в Интернет и могут взаимодействовать между собой. Да, сейчас для этого нужно немного настроить, например, сервис IFTTT и т.п., но прогресс уже не остановить. Как следствие – компьютер начинает проникать в автомобиль, как базовый компонент развлекательного центра. Для автопрома есть вполне обоснованные ограничения, которые прямо влияют на скорость развития IVI – это соблюдение всех мер безопасности. В любом случае, нельзя пренебрегать безопасностью как своей, так и других участников дорожного движения. Автомобиль и дорога – не место для экспериментов. Поэтому проекты энтузиастов, которые хочется рассмотреть в этой заметке – лишь идеи, которые возможно перерастут в будущие прототипы, но уже для коммерческих предложений. Конечно, если речь заходит о безопасности, то доверять следует сертифицированным изделиям, за которыми стоят часы разработок и тестирования.
Разработчики позиционируют Kaa, как многоцелевую платформу промежуточного уровня для решений IoT, нацеленную на создание приложений для подключенных устройств и интеллектуальных систем. Платформа Kaa представляет собой открытый, многофункциональный инструментарий для разработки встраиваемых систем и решений для облака. Платформа выпущена под лицензией Apache Software License 2.0. Для быстрого ознакомления с платформой можно скачать образ для VirtualBox или развернуть систему в облаке AWS.
Идея Kaa заключается в том, что разработчикам предоставляется SDK для создания приложений с использованием API рассматриваемой платформы, и соответствующие сервисы в облаке, включая компиляцию низкоуровневых программ. В текущей версии поддерживаются языки: C, C++, Java, Objective-C и операционные системы Linux, Windows, Android и iOS, а также заявлена поддержка множества встраиваемых аппаратных платформ, например, Raspberry Pi, Intel Edison.
Тут хочется отвлечься и заметить, что, примерно, как когда-то давно в начале 2000-х годов Intel ушла с рынка микроконтроллеров со своим интереснейшим решением – MCS-51, а сейчас, фактически, мы являемся свидетелями подобного – завершение разработки систем Galileo, Joule и Edison, это не осталось не замеченным у сообщества разработчиков и энтузиастов. Многие идеи из предыдущих систем станут началом для новых устройств и решений. Конечно, если для кристалла i8051 (MCS-51), компания Intel продолжила лицензировать его архитектуру, даже после своего ухода с рынка микроконтроллеров, то сейчас, пожалуй, значительно укрепятся позиции Raspberry Pi и Arduino (на классической платформе микроконтроллеров Atmel), как основных инструментов прототипирования встраиваемых устройств. Но не стоит забывать, что для IoT также интересны разработки на основе устройств ESP8266/ ESP32 Espressif и подобные системы с интегрированным интерфейсом Wi-Fi на кристалле.
Возвращаясь к проекту Kaa, следует отметить, что существует ряд архитектурных особенностей, которые делают разработку IoT на этой платформе исключительно быстрой и легкой. Решения на Kaa не должны зависеть от конкретной аппаратной платформы и, таким образом, проект является совместим практически с любыми подключенными устройствами, датчиками и шлюзами. Конечно, это достигается за счет использования универсальных протоколов связи и стандартизированных интерфейсов между компонентами системы. Также Kaa обеспечивает четкую структуру функций и расширений IoT для различных типов приложений. Они могут использоваться, почти по аналогии технологии plug-and-play, с минимальным кодом, который все-таки должен доработать разработчик для своих систем и устройств. Эти возможности, в сочетании с аналитикой в облаке, делают Kaa достаточно привлекательной платформой для Connected Car и др. решений.
Проект Kaa успешно развивается и совершенствуется, но есть и другая, можно сказать, обратная задача для построения решений Connected Car. Суть ее лежит в выполнении задач тестирования программной части облачной системы и непосредственной эмуляции поведения множества подключенных к облаку автомобилей. Для этой задачи интересны проекты с открытым кодом, например, AutoSIM компании Automatski, который разрабатывается с поддержкой двух лицензий: GPLv3 и коммерческой. В данной системе используются основные протоколы передачи данных, включая MQTT, AMQP, CoAP и др. Пользователь при помощи Rest/Json API управляет работой сервера для симуляции требуемых процессов. AutoSIM теоретически позволяет имитировать поток данных от более чем 100 миллионов устройств.
Kaa и AutoSIM – замечательные примеры открытых систем и, возможно, решений, которые станут очень востребованными для автопрома. Но уже сейчас, на нижнем уровне встраиваемых систем для автомобиля, есть множество интересных открытых решений, которые успешно взаимодействуют с облачными сервисами. Например, платформа Android Auto компании Google. Это решение базируется на Android Automotive и нацелено на объединение смартфона и автомобильного медиа-центра в единую платформу, расширяющую функционал IVI-систем.
Поскольку в современном автомобиле присутствуют множество блоков, которые непосредственно взаимодействуют с медиа-центром, например, с использованием сетей Controller Area Network (CAN), Local Interconnect Network (LIN), Media Oriented Systems Transport (MOST), а также более привычные Ethernet и протоколы TCP/IP, то Android Automotive предлагает некоторую абстракцию – hardware abstraction layer (HAL) между физическими сетями автомобиля и функционалом операционной системы Android, доступного разработчикам.
Но, если Android вполне прогнозируемое решение от Google, то использование Linux, в качестве платформы для автомобильного развлекательного центра, пожалуй, уже стала классикой жанра. И, как говорится, кто-нибудь определенно должен был предложить проект, например, Automotive Grade Linux. Это открытая разработка, объединяющая автопроизводителей, поставщиков и технологические компании под эгидой The Linux Foundation. Конечно, AGL доступен в виде исходного кода, а для первоначального знакомства можно скачать образ виртуальной машины, например, для запуска в VirtualBox или вполне можно запустить дистрибутив систему на Raspberry Pi. Для работы с AGL SDK потребуется Docker.
Разработка приложений для AGL предусмотрена на HTML5, Qt OpenGL. Сама платформа автомобильного Linux сосредоточена на безопасности. Например, архитектура решения предполагает гипервизор и, конечно, изоляцию критически-важных приложений, систем мультимедиа и развлечений. Приложения и компоненты AGL строятся по модульному принципу с интерфейсами в виде сигналов/событий, что позволяет скрыть сложную программную реализацию низкоуровневых решений, например, реализацию интерфейса CAN-шины, и предоставить простой API для приложений.
Интересно, что разработчики Automotive Grade Linux присматриваются к реализациям уровня архитектуры из других проектов, впрочем, что характерно для всего движения открытых систем. Например, интересным решением в проекте OpenXC является принцип описания в формате JSON всех сигналов CAN, которые нужно обрабатывать. Программный генератор преобразовывает такое описание в файл на языке C ++, которая может быть скомпилирована и т.п.
Если говорить о проекте OpenXC, то в нем используется комбинация аппаратного и программного обеспечения с открытым исходным кодом, которое позволяет расширить функционал автомобиля с помощью специальных приложений и подключаемых модулей. Проект сконцентрирован на получении данных об автомобиле и использует стандартный интерфейс диагностического разъема OBD-II. Фактически проект позволяет разработать свое мобильное приложение под Android, iOS или использовать для разработки Python, а в качестве основной автомобильной платформы выбрана марка Ford.
Возвращаясь к проекту Automotive Grade Linux стоит заметить, что в нем Raspberry Pi используется скорее для целей демонстрации и прототипирования, а вот для промышленной платформы выбраны специализированные решения, например, системы на базе ARM SoCs (система на чипе) компании Renesas Electronics серии R-Car Generation 3 и некоторые др.
Давайте обратим внимание на немного другой уровень IVI, где не используются такие многофункциональные системы, как Renesas или др. Интересно рассмотреть подходы на основе уже традиционного решения Raspberry Pi. Понятно, что все это скорее прототипы, т.к. Raspberry Pi вряд ли можно сравнить с промышленной платой, специально разработанной для автомобильных применений, но всегда интересны идеи и подходы энтузиастов. Так, одним из любопытных решений для медиа-центра стоит отметить проект CarPC, который фактически является разработкой и совершенствованием графического интерфейса и дополнительного функционала для известного кроссплатформенного медиапроигрывателя Kodi (ранее проект XBMC).
Плата Carberry итальянской компании Paser стоит 123.83 € (евро). Она подключается к стандартному порту расширения Raspberry Pi 3 и поддерживает: CANBUS, GMLAN, инфракрасный приемник и другой функционал. Плата расширения служит отличным дополнением к программным решениям, например, уже упомянутому CarPC. Следует отметить, что программно-аппаратный проект постоянно развивается в сторону расширения функционала и т.д.
Так же активно развивается немецкий стартап AutoPi, представляющий собой проект автомобильной IoT-платформы. Интересной в AutoPi является аппаратная часть на базе Raspberry Pi Zero и наличием интерфейса OBD-II, а также: 3G/4G, Bluetooth, WiFi, GPS-приемника и других компонентов, умещающихся в достаточно небольшом устройстве.
На фоне всех рассмотренных систем прямо напрашивается вопрос: как подключить к Raspberry Pi интерфейс OBD-II? Очевидным ответом будет использование готовой платы, например, PiCAN2 CAN-Bus Board for Raspberry Pi 2/3 по цене от £26.90 (в фунтах без европейского НДС) или что-то похожее. Но очень заманчиво использовать широко распространённый модуль CAN Bus на базе MCP2515/TJA1050, который доступен на AliExpress от USD $1.36 и чуть дороже. Например, такой модуль значительно дешевле плат расширения на базе MCP2515 для Arduino.
Но работая с электронными модулями всегда нужно внимательно относиться к напряжению питания и ограничениям по линиям передачи данных. При использовании стандартного интерфейса расширения GPIO платы Raspberry Pi это достаточно актуально. Дело в том, что на разъеме Raspberry Pi присутствуют напряжения 5В и 3.3В, которыми можно запитать внешние схемы, однако, линии ввода-вывода платы работают только с уровнями до 3.3В. Соответственно, плату модуля MCP2515/TJA1050, рассчитанную только на 5В не следует сразу подключать к Raspberry Pi.

Schematic: CAN bus on raspberry pi with MCP2515 – Raspberry Pi Foundation Forum
Решением может стать простой двухсторонний преобразователь уровней 3.3В/5.5В. Таких готовых модулей для шины SPI предостаточно, но MCP2515 имеет дополнительный вывод прерывания, свидетельствующий о готовности данных. Такой вывод позволит процессору Raspberry Pi выполнять свою работу и реагировать на данные от MCP2515 только в требуемые моменты времени, не отвлекаясь постоянно на мониторинг SPI-интерфейса. Следовательно, готовый модуль сопряжения не будет иметь дополнительного контакта и нужно будет просто сделать свою схему.
Есть и совершенно простое решение, но конечно, не лучшее. Оно основано на том, что микросхема MCP2515 вполне работоспособна с уровнем напряжений от 2.7В до 5.5В, значит ее можно запитать 3.3В с Raspberry Pi, а линии интерфейса SPI и прерывания INT – подключить к GPIO. Для TJA1050 потребуется питание 5В, которое можно подключить все с того же разъема GPIO, но на модуле MCP2515/TJA1050 потребуется аккуратно перерезать дорожку общего питания и подпаяться к ней.
В качестве правильного усовершенствования такой схемы очень разумно использовать делитель напряжения для согласования уровней 5В микросхемы трансивера TJA1050, кстати, можно использовать аналог MCP2551 от компании Microchip или др., и CAN-контроллера MCP2515 с питанием 3.3В (см. рис.). Также интересен проект CAN Simulator на основе Raspberry Pi и, конечно, MCP2515. В качестве трансивера в симуляторе используется микросхема TJA1049, которая хотя и требует питание 5В, но работает без дополнительных компонентов согласования уровней с 3-х вольтовыми системами. Если выбирать самое интересное решение, то, пожалуй, проект CAN-Bus Interface with galvanic isolation самый интересный, так как предлагает использовать трансивер MCP2562, позволяющий без дополнительных элементов подключить контроллер с напряжениями в диапазоне от 1.8В до 5В.

Schematic: CAN + Raspberry Pi
Определившись с аппаратной частью можно переходить к работе с Raspberry Pi на программном уровне. В качестве операционной системы выберем достаточно традиционное решение Raspbian Stretch. А для работы с CAN поддержку драйвера MCP2515 уровня ядра Linux.
Для корректной работы Raspberry Pi с платой интерфейса CAN на базе MCP2515 нужно точно знать версию ядра установленной операционной системы. Для этого следует выполнить команду:
$ uname -a
А, вот, после долгих поисков нашлась актуальная строчка, которая позволила заработать нужному модулю на ядре Linux raspberrypi 4.9.59+ в текущей системе:
dtoverlay=spi0-hw-cs
Screenshot: Передача данных между Raspberry Pi и эмулятором OBD-II на базе платы Arduino
Дальше остается писать новый код или использовать готовые библиотеки. Поскольку драйвер MCP2515 фактически дает системе новый сетевой интерфейс, то разработку можно выполнять практически на любом языке. И тут сразу хочется сказать немного о Go, кроссплатформенном, компилируемом, многопоточном языке программирования, разработанным компанией Google. Этот язык однозначно очень интересен в плане разработки встраиваемых систем и, конечно, будет совсем не сложно найти под него уже готовую библиотеку, подходящую для проекта, например, CAN bus in Go. А если зайти дальше, то следует рассмотреть и проект Gobot – фреймворк, направленный на создание роботов, решений для IoT и т.д. Но, пожалуй, для этой публикации это будет уже слишком много.
К вопросам программирования на Go обязательно следует вернуться, но уже в следующих публикациях. Так же нужно будет не забыть об операционной системе Tizen, на которой ранее базировалась Automotive Grade Linux, а также рассмотреть тренд этого года – голосовые ассистенты в салоне автомобиля и многое др. А в завершении авто тематики текущей публикации просто вспомним о платформе цифровой кабины, представленной Samsung и HARMAN на CES 2018 и немного вдохновимся идеями дизайнеров и инженеров, разработавших этот концепт.
Программное обеспечение OpenAuto Pro — это головное устройство на базе Raspberry Pi, которое предоставляет вашему автомобилю различные функции, включая профиль громкой связи Bluetooth, потоковую передачу музыки, встроенный медиаплеер, навигацию через Android Auto, дублирование экрана, поддержку задней камеры и многое другое.
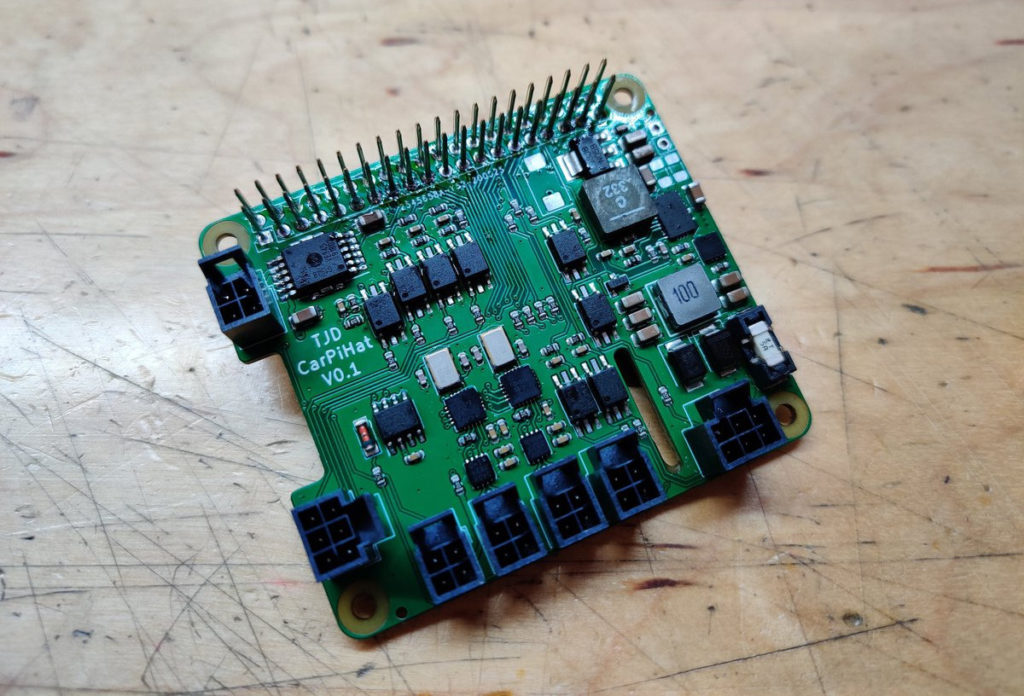
Но компания TDJ поняла, что ей нужно больше, чем просто Raspberry Pi, сенсорный экран и программное обеспечение OpenAuto Pro, чтобы удовлетворить его требования, поэтому она разработала дополнительную плату CarPiHat для Raspberry Pi, обеспечивающую источник питания, оптоизолированные входы GPIO, CAN-шину и выходы 12 В.
Основные характеристики и спецификации CarPiHat:
- Вводы-выводы
- Выделенные реверсивные, подсветка и вспомогательные входы, все оптоизолированные.
- 2x оптоизолированных входа общего назначения (всего 5 входов)
- 2х сильноточных, коммутируемых на стороне высокого напряжения выхода 12 В (@ 1 А) для переключения реле, освещения и т. д.
- 1x независимый порт CAN-шины
- I2C bus.
- Один провод датчика температуры и т. д.
- Понижающий преобразователь 12 В — 5 В с предохранителем и фильтрацией для питания платы Raspberry Pi и сенсорного дисплея
- Схема безопасного отключения, позволяющая Pi управлять собственной мощностью.
![]()
Крепление CarPiHat поверх платы Raspberry Pi
Плата поставляется с 4х стойками и винтами, чтобы установить ее поверх Raspberry Pi, и имеет длинные контакты для 40-контактного разъема, чтобы можно было установить еще одну плату HAT. TDJ, в частности, объясняет, что доступны контакты I2S, которые позволят установить DAC HAT.
CarPiHat котируется на Tindie по цене 80 долларов, но в настоящее время его нет в наличии. Все изображения выше относятся к версии платы 0.1, но будет продаваться обновленная версия платы 0.2. Пока неясно, в чем разница между ними.
Читайте также:
