
Опишите график зависимости полезной мощности от тока стартера
Расчет стартера и сопротивлений участков стартерной цепи. Сопротивление аккумуляторной батареи. Ток короткого замыкания. Определение основных размеров электродвигателя, размера паза якоря, магнитного потока в воздушном зазоре и магнитной индукции.
| Рубрика | Производство и технологии |
| Вид | курсовая работа |
| Язык | русский |
| Дата добавления | 29.03.2015 |
| Размер файла | 276,2 K |
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
КОНТРОЛЬНАЯ РАБОТА
РАСЧЕТ И ПРОЕКТИРОВАНИЕ СТАРТЕРА
1. Электромагнитный расчет стартера
1.1 Расчет сопротивлений участков стартерной цепи
При передаче мощности от электростартера к коленвалу ДВС часть ее теряется в редукторе, образованным шестерней стартера и зубчатым венцом маховика, поэтому необходимо увеличивать мощность стартера на величину потерь, которые составляют 8 - 10%:
Для дальнейшего расчета необходимо перевести мощность из л.с. в ватты, тогда электромагнитная мощность будет равна:
Находим сопротивление аккумуляторной батареи:
Uб - напряжение АБ, определяется из расчета 2,1В на банку,
Qб - номинальная ёмкость АБ (указана в задании).
Рассчитываем полное сопротивление стартерной цепи:
?Uщ - падение напряжения под щетками для 12 вольтовой системы равная 1,3В.
Находим ток при максимальной мощности:
Определяем ток короткого замыкания:
После этого находим сопротивление стартера:
Сопротивление обмотки якоря:
И обмотки возбуждения:
1.2 Определение основных размеров электродвигателя стартера
Для определения основных размеров стартерного электродвигателя необходимо сначала задаться по ГОСТ 3940-84 наружным диаметром стартера по таблице.
После чего диаметр якоря стартера определяется по формуле:
д - величина воздушного зазора, которая принимается равной 0,5 мм
hj - толщина корпуса стартера (0,65ч0,8 см)
1.3 Расчёт обмотки якоря стартера
Для расчета параметров обмотки якоря необходимо задаться количеством пазов железа якоря, которое для простой волновой обмотки всегда должно быть нечётным.
Выбрав количество пазов находим количество активных проводников в обмотке якоря:
- число витков в секции обмотки якоря.
Зная количество активных проводников, находим линейную нагрузку якоря по формуле:
Сечение провода обмотки якоря находим по формуле:
- длина полувитка обмотки якоря в метрах,
N - количество активных проводников в обмотки якоря,
2а - число параллельных ветвей обмотки якоря.
Для простой волновой обмотки 2а=2
1/57 - удельное сопротивление меди (или, что тоже самое, 0,0175 Ом*м/),
Ra - сопротивление обмотки якоря
Длина полувитка обмотки якоря определяется по формуле:
ф =(рDa)/2p=(3,14*8,1)/4=6,36 - полюсное деление электрической машины, а величина 1,4ф учитывает длину лобовых частей обмотки.
Длину пакета железа якоря определяем по формуле:
После определения сечения провода находим его размеры по ГОСТ 434-78 - для прямоугольного провода или по ГОСТ 787*78 для провода круглого сечения. Для получения оптимальных размеров паза необходимо выбирать прямоугольный провод с соотношением высоты (b) к толщине (a) в пределах 2,5ч4 мм.
Предварительно размеры паза якоря определяются с учетом пазовой изоляции, толщина которой составляет ?=0,2ч0,4 мм.
Размеры паза якоря для одновитковой секции находим по формулам:
1.4 Расчет магнитной цепи
Как уже было указано, габариты электрической машины в значительной мере зависят от частоты вращения, поэтому вначале необходимо найти частоту вращения якоря:
- минимальная пусковая частота вращения коленвала ДВС (50ч70 ), i=10ч20 - передаточное число от вала стартера к коленвалу ДВС.
Кроме того, расчет магнитной цепи стартера ведется по участкам, которых в стартерном электродвигателе шесть:
1. Воздушный зазор.
2. Зубцовый слой.
5. Стык полюса и корпуса.
Для расчета магнитной цепи необходимо сначала определить магнитный поток в воздушном зазоре:
a - число пар параллельных ветвей обмотки якоря
(для простой волновой обмотки 2а=2, а=1),
р - число пар полюсов (у стартеров 2р=4, р=2),
n - частота вращения якоря стартера
N - количество активных проводников обмотки якоря,
Еобр - противо-ЭДС обмотки якоря,
затем определяем магнитную индукцию в воздушном зазоре:
lд - длина воздушного зазора
bp - длина полюсной дуги
Длина воздушного зазора находится по формуле:
а длина полюсной дуги:
ад =0,72ч0,75 - коэффициент полюсного перекрытия.
Предварительно минимальная ширина зубца якоря определяется по формуле:
Выполнив эскиз на милиметровке в масштабе 5:1, уточняем bzmin=0,31.
Зубцовое деление якоря (зубцовый шаг, шаг по пазам) находим по формуле:
После этого определяем максимальную магнитную индукцию в зубцовом слое:
kc=0,9ч0,95 - коэффициент заполнения сталью.
Тело (спинка) якоря
Магнитную индукцию в теле якоря находим по формуле:
Высоту тела якоря находим из следующей зависимости:
Ширину полюса определяем исходя из рекомендованных таблицей значений магнитной индукции.
у=1,1ч1,2 - коэффициент рассеяния магнитного потока,
kc - коэффициент заполнения сталью. kc=1 т.к. полюс и корпус не шихтованные,
lm - длина полюса, lm=la.
Высота усика полюса полюса (полюсного наконечника) определяется исходя из магнитной индукции в нём, которая принимается равной Bp=20000Гс.
Стык полюса и корпуса
Магнитная индукция в стыке равна магнитной индукции в полюсе, поэтому применяем:
Длина корпуса принимается равной двойной длине полюса:
а магнитная индукция в корпусе рассчитывается по формуле:
1.5. Расчет намагничивающей силы (Н.С.)
Основная задача этой части расчета заключается в определении суммарной намагничивающей силы всех участков магнитной цепи, что позволит в дальнейшем определить параметры обмотки возбуждения стартера.
Намагничивающая сила воздушного зазора
Намагничивающая сила зубцового слоя
awz- удельная намагничивающая сила зубцового слоя, которая определяются по кривой намагничивания по значению магнитной индукции Bz для электротехнической стали Э-11.
Намагничивающая сила тела (спинки) якоря
Для определения намагничивающей силы тела якоря необходимо сначала определить среднюю длину магнитной силовой линии этого участка по формуле:
после чего рассчитываем Н.С. тела якоря:
awa- удельная намагничивающая сила тела якоря, определяется по кривой намагничивания для электротехнической стали Э-11.
Намагничивающая сила полюса
awm - удельная намагничивающая сила полюса, определяется по кривой намагничивания стали Ст10.
Намагничивающая сила стыка полюса с корпусом
Величина стыка полюса с корпусом принимается равной дcm=0,05мм.
а магнитная индукция в стыке равна магнитной индукции полюса, тогда:
Намагничивающая сила корпуса
Средняя длина магнитной силовой линии корпуса определяется по формуле:
awj - удельная намагничивающая сила корпуса, определяется по кривой намагничивания для стали Ст 10.
После расчета Н.С. для каждого из участков магнитной цепи стартерного электродвигателя можно рассчитать суммарную Н.С. без учета реакции якоря.
1.6 Расчет характеристики холостого хода (Х.Х.) стартера
После определения суммарной Н.С., полученной для режима максимальной мощности, необходимо построить характеристику Х.Х. стартера, которая в дальнейшем потребуется для расчета рабочих характеристик стартерного электродвигателя. Для этого задаемся десятью значениями магнитной индукции в воздушном зазоре Bд, а именно: 1000, 2000, 3000 . 10000Гс и производим для каждого значения Вд расчёт Н.С. всех шести участков магнитной цепи и суммарной Н.С. стартерного электродвигателя по методике, изложенной выше. Результаты расчётов заносим в таблицу:
Электромеханическими характеристиками называется зависимость основных параметров стартерного электродвигателя (напряжения, частоты вращения, момента, КПД, мощности) от тока стартера Iс. Удобство использования электромеханических характеристик для анализа работы системы электростартерного пуска объясняется возможностью совмещать их с вольтамперными характеристиками аккумуляторных батарей.
Принципиальная электрическая схема включения стартера представлена на рисунке 3.
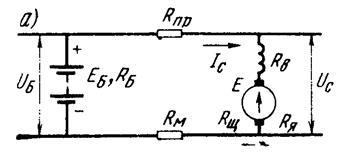
Рисунок 3 Принципиальная электрическая схема включения стартера
На рисунке 4 изображены зависимости падений напряжений на различных участках схемы в функции тока Iс. (баланс напряжений системы пуска).
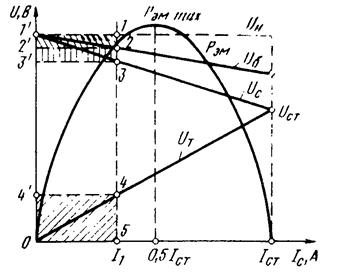
Рисунок 4 Баланс напряжений
Ток Iст соответствует полностью заторможенному якорю стартера; при этом частота вращения пс = 0. В этом режиме все напряжение, Uст, подведенное к стартеру, равно падению напряжения на его внутреннем сопротивлении:

где — сопротивление обмоток возбуждения, — сопротивление обмотки якоря; 2 — сопротивление щеток и щеточного контакта.
Сопротивление зависит от частоты вращения, плотности тока под щеткой и материала щеток. В отличие от обмоток стартерного электродвигателя сопротивление является нелинейным. При нагрузках, в которых работает стартер, падение напряжения под щетками не превышает 1 . 2 В и мало изменяется от силы тока и частоты вращения. В этом случае можно принять, что падение напряжения на внутреннем сопротивлении стартера изменяется линейно от силы тока, потребляемого стартером (прямая UТ (/с) на рис. 4. Величину UТ называют тормозным напряжением.
Потери мощности на отдельных участках цепи при токе пропорциональны заштрихованной площади на рисунке 4, так как площадь графика в координатах напряжение – ток есть мощность. Площадь 3', 3, 4, 4' соответствует электромагнитной мощности, подведенной к якорю стартера, которая при изменении тока от 0 до Iст изменяется по параболе
имеющей корни Iс1 = 0 и
Выражение (1) имеет максимум при
Кривая РЭМ (/с) изображена на рисунке 4.
Электромеханические характеристики стартера показаны на рисунке 5.
Зависимости частоты вращения пс (Iс) и момента Мс(Iс)можно разбить на два участка: первый, когда магнитная система стартера не насыщена и магнитный поток Ф с ростом тока Iс резко увеличивается [до Iс < (0,8 . 0,9) Iсн, где Iсн — номинальный ток стартера], и второй, когда магнитная система насыщена и магнитный поток Ф почти не изменяется (Iс > (0,8 . 0,9) Iсн ). Характеристики пс (Iс) и Мс(Iс) на втором участке имеют почти линейный характер.
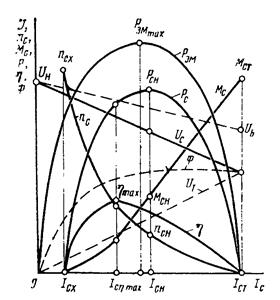
Рисунок 5 Электромеханические характеристики стартера
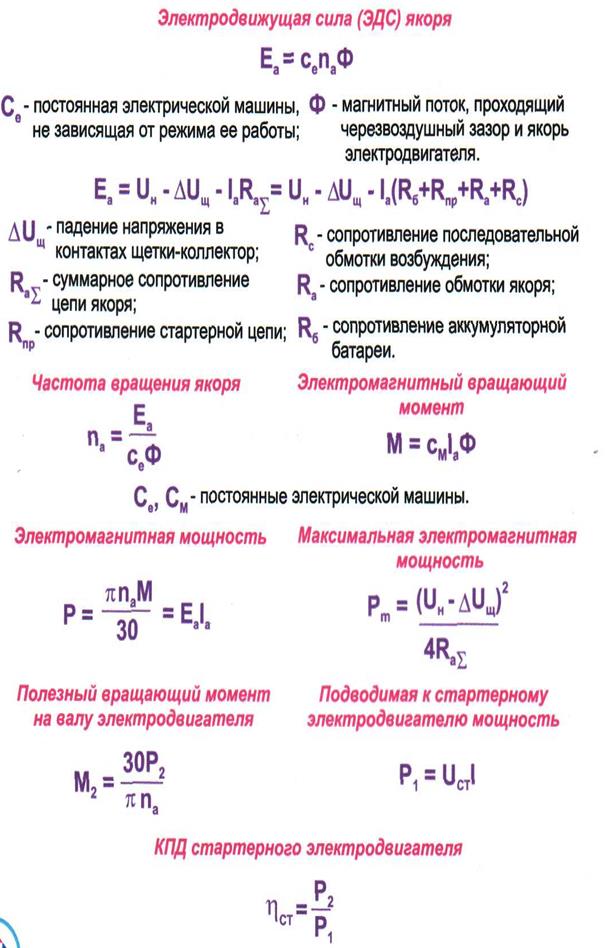
Механическая мощность на валу стартера:
меньше электромагнитной мощности РЭМ на величину потерь на трение и подшипниках и щеточном контакте, вентиляционных и магнитных потерь (перемагничивание и вихревые токи). Стартер потребляет электрическую мощность
преобразовывая ее в механическую с КПД
Максимум КПД электродвигателя стартера не превышает значений 0,5 . 0,6. Максимум мощности Рс не совпадает с максимумом КПД. На электромеханических характеристиках стартера можно выделить следующие режимы:
холостого хода, характеризуемый частотой вращения nгх, силой тока Iсх;
режим при максимуме КПД (характеризуется током Iсη шах).
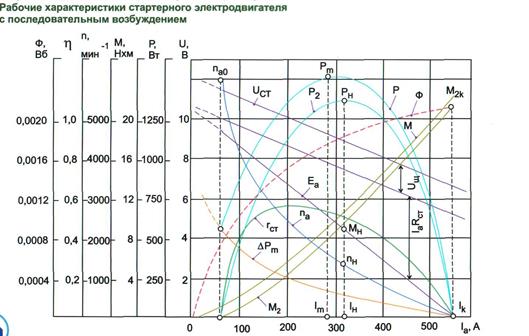
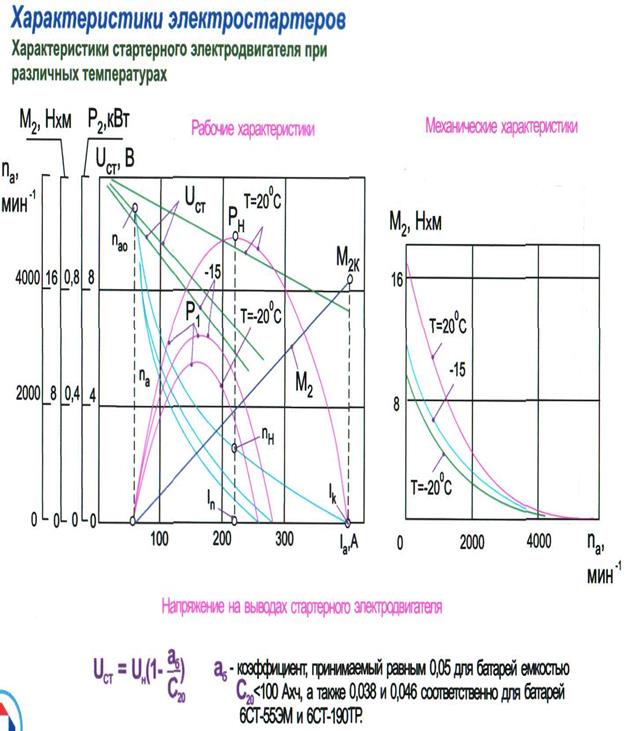
Свойства электродвигателей оценивают по рабочим и механическим характеристикам. Рабочие характеристики - совокупность зависимостей напряжения на выводах стартера Uct; полезной мощности Р2; полезного момента на валу стартера М2; частоты вращения n; угловой скорости w; КПД n от тока якоря Iя. Эти характеристики строятся на одном графике. Механические характеристики - n =f(М2);
Скоростная, моментная и механическая характеристики зависят от магнитного потока и его изменения с изменением режима работы электродвигателя, то есть от способа возбуждения электродвигателя.
Магнитный поток в рабочем воздушном зазоре зависит от МДС на пару полюсов, т.е. от силы тока возбуждения IВ и числа витков в обмотке возбуждения.
 |
26. Особенности конструкции и преимущества стартеров с постоянными магнитами и встроенным редуктором
При использовании постоянных магнитов исключается сопротивление обмотки возбуждения, которое составляет 0.3..0.5 суммарного сопротивления стартера. Как выше отмечалось мощность стартера определяется величиной суммарного сопротивления всех элементов цепи пусковой системы. Исключение обмотки возбуждения позволяет применить АКБ с большим внутренним сопротивлением и соответственно меньшей емкости при сохранении той же мощности. В результате можно сделать вывод, что применение постоянных магнитов в стартере позволяет снизить потребную емкость аккумуляторной батареи.
Еще одним положительным свойством стартеров с постоянными магнитами является меньшее проявление действия реакции якоря. Как выше отмечалось за счет анизотропных свойств магнита поток реакции якоря замыкается через корпус и поэтому получается значительно меньшим по величине по сравнению с аналогичной конструкцией с электромагнитным возбуждением. В стартерах с постоянными магнитами этот поток может быть еще больше ослаблен за счет выполнения прорезей вдоль корпуса по центру магнита, что еще больше увеличит магнитное сопротивление потоку поперечной реакции якоря. Уменьшение потока реакции якоря благотворно сказывается на коммутации.
Преимуществом стартеров с редуктором является возможность сделать электродвигатель стартера более высокооборотным, а следовательно и меньших габаритов, чем стартер той же мощности без редуктора. При этом резко снижается расход дефицитной и дорогостоящей меди. Еще большая экономия меди возможна благодаря применению постоянных магнитов вместо обмоток возбуждения.
Повышение быстроходности электродвигателя и применение редуктора требует для обеспечения надежной работы стартера:
· более высокого уровня технологии изготовления деталей стартера;
· применения новых конструктивных решений в конструкции стартера;
· применения новых материалов и новых технологий их получения.
Все это делает изготовление узлов стартера более дорогостоящим. Однако, затраты на производства окупаются за счет снижения металлоемкости и улучшения эксплуатационных качеств стартера. Стартер меньших габаритов и меньшей массы более удобен при компоновке его на ДВС. Решение задач связанных с производством стартеров с редуктором требует больших капитальных затрат, но несмотря на это производство стартеров со встроенным редуктором экономически выгодно.
Анализ конструкции и технологии стартеров с редукторами показывают, что для зарубежных фирм, решивших указанные выше конструкторские, материаловедческие и технологические проблемы, их производство не только дает экономию металла, но и является более выгодным, чем современное производство стартеров классической конструкции.
При одинаковой мощности масса стартера со встроенным редуктором на 25 40 % ниже массы стартера классической конструкции.
Стартеры с редуктором использовались на автомобиле уже давно, но до последнего времени встречались очень редко. Повышение мощностей двигателей, устанавливаемых на автомобилях, требовало использовать более мощные стартеры, а повышение компактности ДВС требует и более компактные стартеры. Дополнительно возникли проблемы с материальными ресурсами, в частности дефицит меди. В то же время возросший уровень технологии производства сделал возможным реализовать в массовом производстве конструкции стартеров с редукторами. Все эти причины привели к широкому использованию в настоящее время стартеров с редуктором.
Передаточное отношение редуктора, как правило, лежит в пределах 2,5. 4, в среднем 3,3.
Для стартеров с возбуждением от постоянных магнитов передаточное отношение выполняют более высоким (5 – 6).
В ряде случаев применение встроенного в стартер редуктора позволяет применить приводную шестерню с увеличенным числом зубьев до z=12, против обычного для стартеров без редуктора z =9. 10. Это улучшает условия зацепления шестерни стартера с зубчатым венцом маховика ДВС за счет увеличения степени перекрытия передачи и, в некоторой степени, КПД этой передачи.
Основные схемы редукторов стартера
Разработаны и серийно выпускаются стартеры с редукторами следующих типов:
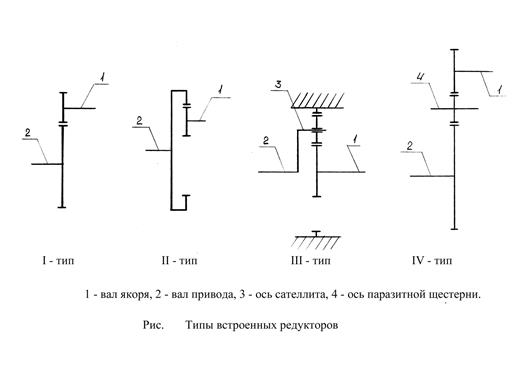
Тип I цилиндрический редуктор с внешним зацеплением;
Тип II цилиндрический редуктор с внутренним зацеплением;
Тип III планетарный редуктор;
Тип IV Цилиндрический редуктор с паразитной шестерней.
Все редукторы этих типов выполняются одноступенчатыми, с прямозубыми шестернями. Схематическое изображение редукторов различных типов и их кинематические схемы показано на Рис. Помимо этого встречаются конструкции стартеров с двухступенчатыми редукторами.
За счет большого смещения шестерен стартер с редуктором типа I имеет значительный поперечный габарит, который возрастает с увеличением передаточного отношения. Преимуществом редуктора такого типа является технологичность изготовления его шестерен.
К недостаткам относится:
· значительное увеличение поперечного габарита по сравнению со стартерами без редуктора;
· радиальная нагрузка на якорь стартерного электродвигателя, что требует обязательного применения подшипников качения.
Стартер с редуктором типа II цилиндрический с внутренним зацеплением имеет несколько меньший поперечный габарит, чем стартер с редуктором типа I. Редуктор типа II несколько сложнее в изготовлении за счет наличия шестерни с внутренним зубом.
Стартер с планетарным редуктором (тип III) не имеет смещения оси корпуса относительно крышки со стороны привода, что позволяет наиболее просто компоновать стартер на двигателе и исключает сложности в его применении взамен стартеров без редуктора.
Внешне стартер с планетарным редуктором практически идентичен стартеру без редуктора. Габариты и масса стартера с планетарным редуктором значительно меньше стартеров без редуктора при тех же характеристиках. Планетарный редуктор имеет более высокий коэффициент полезного действия, чем редукторы типа I и II. Кроме того, он значительно снижает радиальные нагрузки на вал якоря стартерного электродвигателя, что улучшает условия работы подшипников якоря и дает возможность применить для вала подшипники скольжения. Технологически этот редуктор несколько сложнее редукторов типа I и II, однако, его сборка несколько проще по сравнению с ними за счет соосности основных деталей стартера. Коронная шестерня выполняется как правило из пластмассы.
Стартеры в редуктором типа IV цилиндрический с паразитной шестерней имеют продольный габарит близкий к габариту стартера без редуктора. Это достигается тем, что реле стартера расположено соосно приводной шестерне. КПД редуктора несколько ниже, чем у редукторов типа I и II. Отличительной особенностью редуктора является применение паразитной шестерни, расположенной между ведущей шестерней, закрепленной на наружной обойме роликовой муфты свободного хода. Все шестерни выполняются прямозубыми, с наружными зубьями. Паразитная шестерня установлена на роликовом подшипнике на оси, закрепленной в корпусе редуктора, в котором также размещен привод.

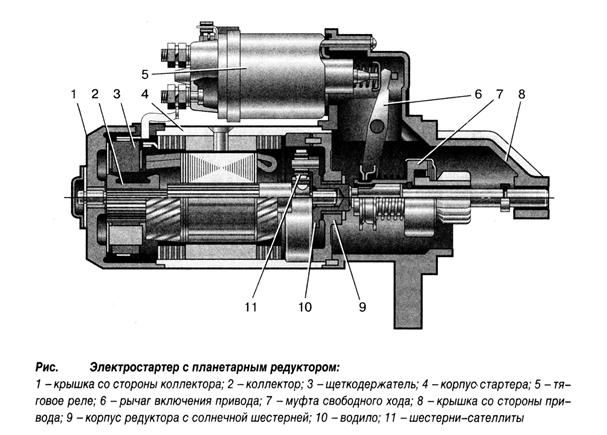
Типовая конструкции планетарного редуктора.
Основной конструктивной особенностью стартеров является их компоновка, отличающаяся от классической конструкции соосным расположением привода тягового реле стартера. При этом оси стартерного электродвигателя и привода не совпадают. Кинематически вал стартерного электродвигателя связан с выходным валом стартера посредством цилиндрического прямозубого редуктора с внешним зацеплением. По компоновочной необходимости в редуктор введена промежуточная паразитная шестерня. Ведущая шестерня редуктора выполнена заодно целое с валом стартерного электродвигателя. Ведомая шестерня расположена на приводе и выполнена заодно целое с наружной обоймой муфты свободного хода. Промежуточная шестерня вращается на роликовом подшипнике состоящем из пяти роликов установленных в пластмассовом сепараторе. Ось промежуточной шестерни запрессована в крышку редуктора.
С целью повышения компактности, ось промежуточной шестерни не лежит в плоскости осей электродвигателя и привода.
Ведущая шестерня редуктора съемная, соединяется с валом электродвигателя с помощью прямых накатных шлицев.
Подавляющие большинство современных стартеров с редуктором, разработанных и выпускаемых или подготавливаемых к выпуску зарубежными фирмами, имеют ПЛАНЕТАРНЫЙ РЕДУКТОР, что может быть объяснено хорошими компоновочными свойствами и достаточной надежностью и долговечностью стартеров с таким типом редуктора.
При увеличении момента сопротивления (торможении якоря) стартер потребляет большой ток и развивает повышенный вращающий момент, что необходимо для надёжного пуска двигателя.
На [рис. 1] показаны характеристики стартера СТ130-А1, на которых даны зависимости изменения вращающего момента (М), частоты вращения (n) и мощности стартера (N) от потребляемого тока (I).
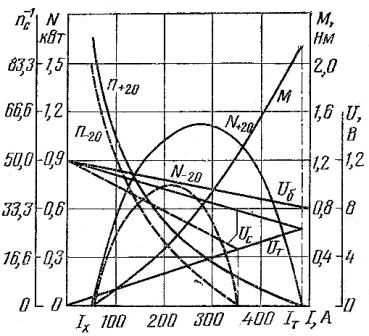
Рис. 1. Электромеханические характеристики стартера СТ130-А1 с аккумуляторной батареей 6СТ-90 при температурах +20 градусов Цельсия (сплошные линии) и -20 градусов Цельсия (штриховые линии).
n – Частота вращения якоря;
Uб – Напряжение батареи;
Uс – Напряжение на стартере;
Uт – Тормозное напряжение (падение напряжения на стартере Uт=RстI).
Из характеристик видно, что на холостом ходу стартер развивает максимальную частоту вращения, при этом вращающий момент и мощность стартера равны нулю. По мере его загрузки потребляемый ток и вращающий момент возрастают, а частота вращения снижается.
При полном торможении якоря вращающий момент и потребляемый ток достигают максимальных значений, а мощность стартера становится равной нулю. Контрольные точки для проверки стартера на стенде – частота вращения, напряжение на холостом ходу, потребляемый ток, вращающий момент, потребляемый ток и напряжение при полном торможении.
Стартер развивает максимальную мощность при потребляемом токе, равном половине максимального значения. На мощность стартера влияют ёмкость аккумуляторной батареи, степень её разряженности и температура.
С понижением ёмкости батареи и температуры электролита мощность и вращающий момент стартера падают вследствие роста внутреннего сопротивления батареи, уменьшения напряжения на клеммах стартера и потребляемого тока. При плохих контактах в присоединительных проводах мощность стартера также резко уменьшается.
Передаточное число от стартера к двигателю выбирают, исходя из того, чтобы момент сопротивления (Мс) двигателя, соответствующий наиболее тяжёлым условиям пуска, преодолевался моментом (М) стартера при потребляемом токе, равном 2/3 Iт (Iт – ток полного торможения). При этом должна также быть обеспечена пусковая частота вращения коленчатого вала. В подобных условиях стартер развивает мощность ниже максимальной всего лишь на 12%, но значительно больший момент, что требуется для надёжного преодоления момента сопротивления холодного двигателя.
Проведение расчетов магнитной цепи и характеристик холостого хода стартера. Рассмотрение характеристики совокупности зависимостей напряжения на зажимах стартера, полезной мощности, части вращения, вращающего момента и КПД стартера от потребляемого тока.
| Рубрика | Транспорт |
| Вид | курсовая работа |
| Язык | русский |
| Дата добавления | 08.02.2015 |
| Размер файла | 2,0 M |
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
(МОСКОВСКИЙ АВТОМОБИЛЬНО-ДОРОЖНЫЙ ИНСТИТУТ)
Кафедра электротехники и электрооборудования
Курсовой проект по теме:
Расчет электромеханических характеристик стартера 23.3708
1. Назначение и особенности конструкции стартера 23.3708
2. Исходные данные для расчета
2.1 Корпус, пояс, якорь, воздушный зазор
2.3 Обмотка якоря
2.4 Обмотка возбуждения последовательная
2.5 Изоляция обмоток возбуждения
2.6 Щеточно-коллекторный узел
3. Расчет конструктивных параметров стартерного электродвигателя
3.1 Расчетная длина полюса дуги
3.2 Полюсный шаг
3.3 Коэффициент полюсного перекрытия
3.4 Параметры якоря
3.5 Размеры полюса, корпуса и межполюсного пространства
3.6 Параметры последовательной обмотки возбуждения
4. Расчет характеристики холостого хода
4.1 МДС зубцовой зоны якоря
4.2 МДС воздушного зазора между полюсом и якорем
4.3 МДС сердечника якоря
4.4 МДС в полюсе
4.5 МДС воздушного зазора в стыке полюса и корпуса
4.7 Характеристики намагничивания
5. Реакция якоря
5.1 Магнитная индукция в воздушном зазоре
5.2 Учет реакция якоря по характеристике холостого хода
6. Расчет электромеханических характеристик стартера для номинального и пускового режимов
6.1 Напряжение питания стартера
6.2 Электрические сопротивление обмотки стартерного электродвигателя для заданных условиях пуска
6.3 Токи в режиме полного торможения
6.4 Момент сил трения подшипниках скольжения
6.5 Электромеханические (рабочие) характеристики стартера
6.6 Напряжение питания стартера
6.7 Электрические сопротивление обмоток стартерного электродвигателя для заданных условий пуска
6.8 Токи в режиме полного торможения
6.9 Электромеханические (рабочие) характеристики стартера
Список используемой литературы
Современные автомобили и тракторы оборудованы электропусковыми системами с электрическими стартерами прямого действия, электродвигатели которого осуществляют вращение коленчатого вала ДВС через понижающие редуктор. Широкое распространение электро-стартерных пусковых систем обусловлено их простотой. Надежностью, компактностью, постоянной готовностью к работе, удобством дистанционного управления, а также возможностью подзаряда аккумуляторной батареи во время работы двигателя.
Электростартеры получают питание при пуске ДВС от автономного источника - аккумуляторной батареи, мощностей которой ограничена, поэтому напряжение на её зажимах не является постоянными, а падает с увеличением нагрузки. Стартер характеризуется кратковременными режимом работы, мощность его электродвигателя не ограничивается нагревом обмоток, как у электрических машин общепромышленного назначения. Кроме того, для стартерного хода, так как его детали рассчитаны на нагрузки, возникающие при этих режимах.
Свойства стартера зависят от способа возбуждения его электродвигателя и оцениваются по электромеханическим (рабочим) характеристикам.
В данном курсовом проекте ведутся расчеты стартера СТ117-А. При известной геометрии магнитной системы и обмоточных данных проводятся расчеты магнитной цепи и характеристики холостого хода и на базе - расчета электромеханических характеристик. Электромеханические характеристики представляют собой совокупность зависимостей напряжения на зажимах стартера, полезной мощности, части вращения, вращающего момента и КПД стартера от потребляемого тока.
магнитный стартер вращающий ток
1. Назначение и особенности конструкции стартера 23.3708
Стартер 23.3708 (рис.1.1) -- четырехполюсный электродвигатель постоянного тока, последовательного возбуждения с электромагнитным тяговым реле и жестким рычажным приводом, установлен на постели блока цилиндров с правой стороны и крепится к нему двумя стяжными стальными лентами. Надежное соединение стартера с массой автомобиля обеспечивается подсоединением к нему гибкой токопроводящей перемычки.
Рис. 1.1. Стартер 23.3708.
1 -- защитный наконечник; 2 -- вывод; 3 -- контактный болт; 4 -- крышка реле; 5 -- контактный диск; 6 -- удерживающая обмотка; 7 -- втягивающая обмотка; 8 -- якорь тягового реле; 9 -- рычаг включения привода; 10 -- крышка привода; 11 -- муфта свободного хода; 12 -- шестерня привода; 13 -- пружина; 14 -- якорь; 15 -- обмотка возбуждения; 16 -- корпус; 17 -- уплотнительная прокладка; 18 -- крышка со стороны коллектора; 19 -- защитный кожух; 20 -- коллектор; 21 -- втулки из графитизированной бронзы; 22 -- щеткодержатель; 23 -- ролик; 24 -- толкатель; 25 -- прижимная пружина; 26, 30 -- замковые кольца; 27 -- опорная чашка; 28 -- пружина; 29 -- поводковая муфта; 31 -- буферная пружина; 32 -- шлицевая втулка; 33 -- центрирующее кольцо; 34 -- наружная ведущая обойма; 35 -- держатель пружин; 36 -- специальная шайба; 37 -- войлочный уплотнитель; 38 -- кожух муфты; 39 -- ведомая обойма с шестерней; 40 -- втулка
В корпусе стартера помещены четыре обмотки возбуждения. Каждая пара обмоток соединена последовательно. Обе пары включены между собой параллельно и подключены одним концом к клемме, а другим выведены на массу. Между этими обмотками расположен якорь, также имеющий обмотку. Опорами для якоря служат бронзовые втулки, помещенные в крышках и промежуточной опоре. В корпусах крышек имеются отверстия, заканчивающиеся масленками, через которые подается смазка к этим подшипникам при обслуживании. Внутри отверстий заложены фетровые фитили, удерживающие смазку.
В задней крышке помещена траверса, на которой смонтированы щеткодержатели с пружинами и щетками. Всего у стартера восемь щеток марки МГСO размером 8,8x19,2x14 мм. Для обслуживания щеточно-коллекторного узла в задней крышке имеются смотровые окна, закрытые защитной лентой. На переднем конце якоря нарезана четырехзаходная прямоугольная резьба, по которой перемещается с помощью приводного
Читайте также: