
Как разобрать колесо румба
07.06.2017
Шаг 1
Начните с вашей Roomba вверх ногами, с колесами вверх.


Шаг 2
Ослабьте винт боковой щетки с помощью отвертки.
Снять боковую щетку

Шаг 3
Снимите крышку батарейного отсека и отложите ее в сторону.


Шаг 4
Ослабьте одиночные винты, которые удерживают боковое колесо на Roomba.
Снимите крышку над колесом, которое удерживалось винтами.
Снимите колесный модуль.



Шаг 5
Извлеките аккумулятор, используя зеленые выступы с обеих сторон аккумулятора.



Комментарии
Пока еще нет ниодного комментария, оставьте комментарий первым!
Также вас могут заинтересовать

Замена батареи Samsung Galaxy S5
Samsung Galaxy Tab 4 8.0 Wi-Fi Замена камеры заднего вида

Зачем! W670SZQ1 Замена расширения памяти RAM

Замена материнской платы Samsung Galaxy S8

Замена клавиатуры Asus U50F-RBBAG05

First Act MA2039 Замена динамика
Вам могут помочь
AEPerson - сервис с 20 летним стажем!
Лаборатория ремонта
г. Москва, Маршала Бирюзова, 34, Мастерская Лаборатория ремонта в Щукино (справа от подъезда вход на цокольный этаж)
Сервисный центр в Медведково
Сломался пылесос iRobot?
Оставьте заявку на ремонт пылесоса или просто задайте вопрос мастерам и с вами свяжутся представители сервисных центров для устранения неисправности.
Оставить заявку Задать вопрос
Найти сервис-центр
Помощь в других городах
Полезные мануалы
Нет возможности обратиться в сервисный центр? Тогда попробуйте починить сами с помощью пошаговых инструкций, гайдов и мануалов, которые мы собрали в одном месте.
Случайные инструкции

Этот кусок позволяет открыть канистру и удалить пылесосить мусор.

Это руководство расскажет вам шаг за шагом, как заменить неисправный ролик в пылесосе Shark Rocket HV381.
Замените правое рабочее колесо вашего POWERbot, чтобы устранить проблемы с движением.

Кисть валик, кажется, не вращается больше? Следуйте этому руководству, чтобы заменить щеточный валик.
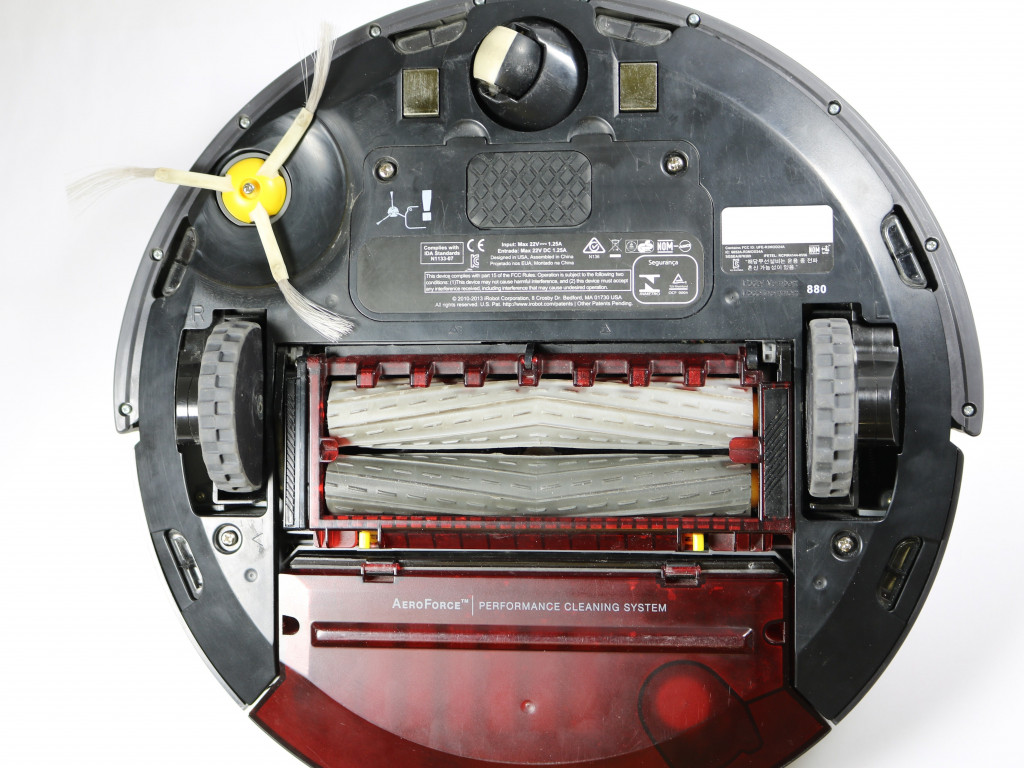
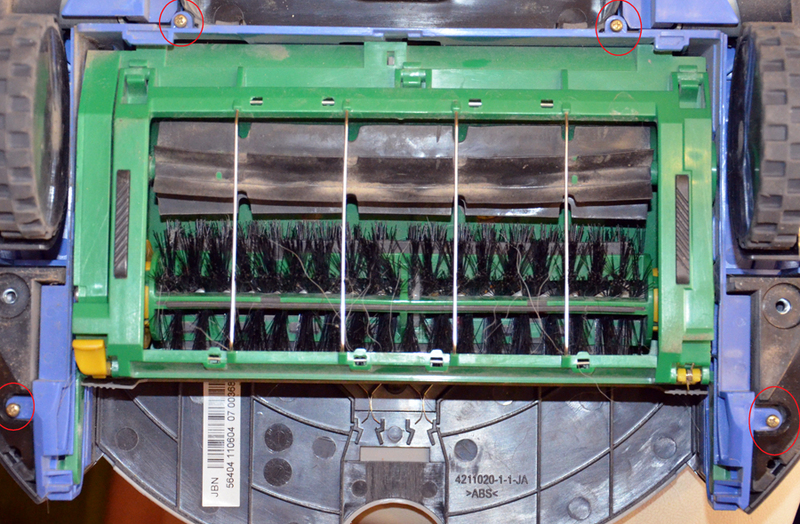
Если у Вашего робота-пылесоса iRobot Roomba изменилось поведение, а именно, при включении он начинает бесконечно вращаться по спирали, то возможно, проблема в модуле колеса. Как правило, модуль достаточно заменить на новый, тогда робот должен начать работать нормально. Но лучше перед этим попробовать поставить для проверки модуль с другого заранее рабочего робота (т.к. причина вращения может быть не только в самом колесе). На фото показано, как снять модуль колеса с iRobot Roomba 780 и заменить его. Для других моделей Румба необходимо буде выполнить аналогичные действия, разница будет заключаться только в расположении болтов.
.jpg)
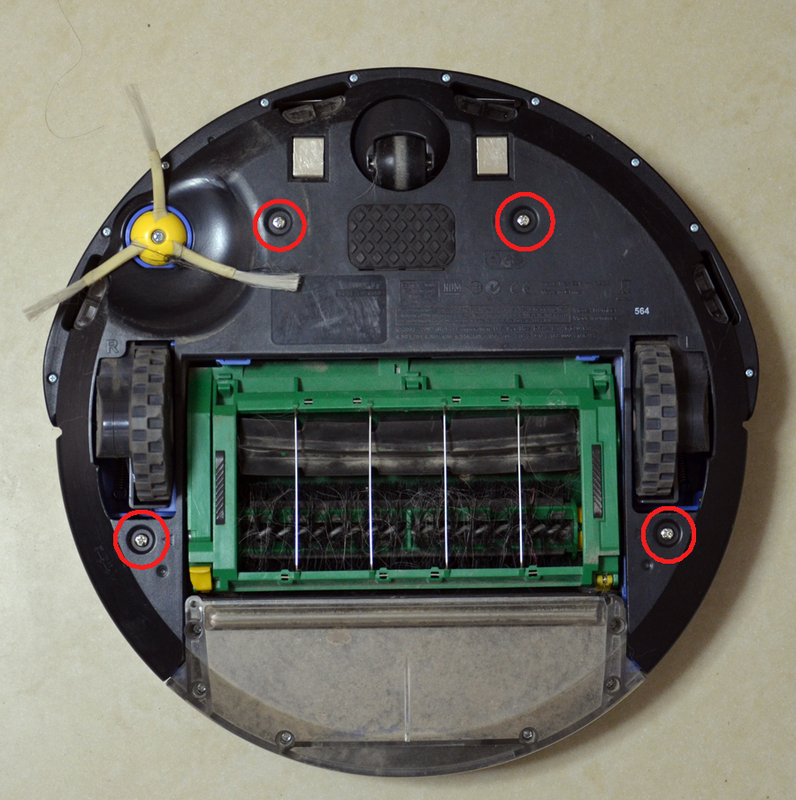
Для того, чтобы добраться и снять колесо, необходимо открутить болты, обведенные красным на фотографии. Также необходимо снять мусоросборник.

Далее снимаем боковую щетку, так как она также удерживает крышку. Следующее действие: снимаем пластиковую крышку (дно).

Перед нами внутрення модульная структура робота. Для отсоединения модуля колеса необходимо открутить три болта, удерживающие модуль.

Вооружаемся маленькой крестовой отверткой, откручиваем болты и снимаем модуль. Снимать нужно аккуратно, так как модуль соединен с основной платой контактами.

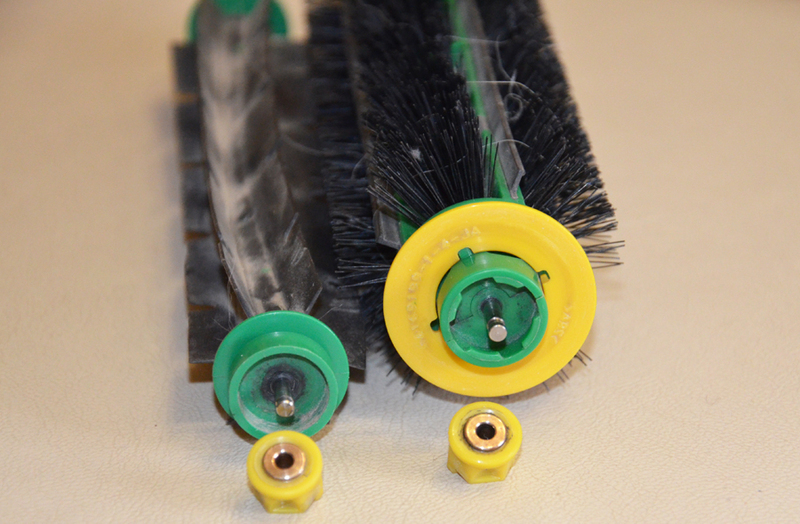
Собственно сам модуль.

На фото запечатлены 780 и 790 модели Roomba. Как видно, без нижней крышки отличить их невозможно. Модули у аппаратов одинаковые.
Сердечно благодарим за фотографии нашего клиента, Антона Шнейдера!
Читаем. Осторожно, трафик!
Небольшое уточнение. Идея публикации топика пришла мне неожиданно для меня, во время процесса разборки, когда я уже почти полностью разобрал пылесос. потому в посте я покажу процесс сборки.
В общем поехали…
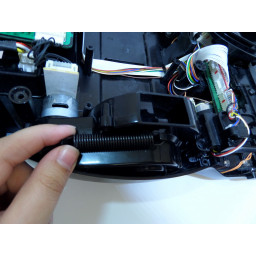
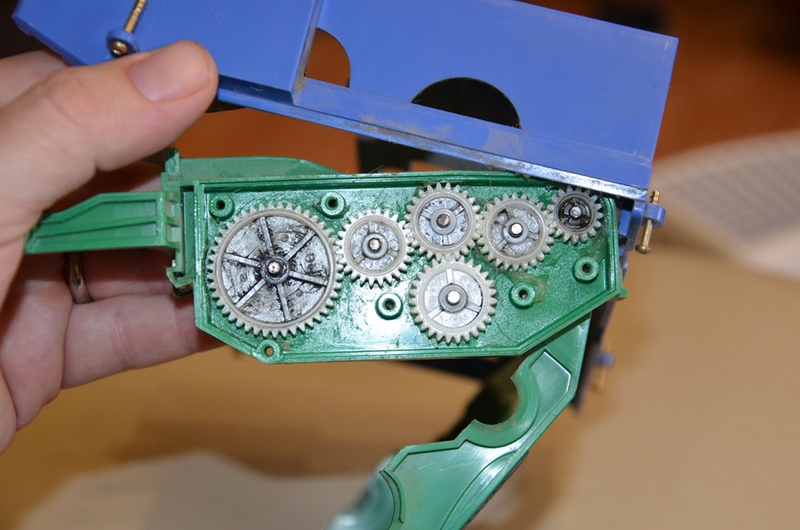
Это редуктор щеток. Когда я его вскрыл, там все было черное и липкое… все шестерни были замотаны волосами в перемешку со смазкой. Одну шестерню даже немного подточило этими самыми волосами. Как видите, я все промыл и смазал.

Это общий вид блока щеток с редуктором.
Без щеток.


Под щетками находится датчик, назначение которого мне непонятно.
С виду похож на динамик из китайских открыток, но тут целая плата для его работы.

Он же, установленный в корпус.

Такс, блок с щетками собран.
Теперь начнем собирать сам пылесос. Для начала устанавливаем материнскую плату в корпус.
Плата с верхней стороны.
По видимому производитель использует один вид платы для всей линейки пылесосов, напаивая в зависимости от функционала дополнительные электронные элементы.

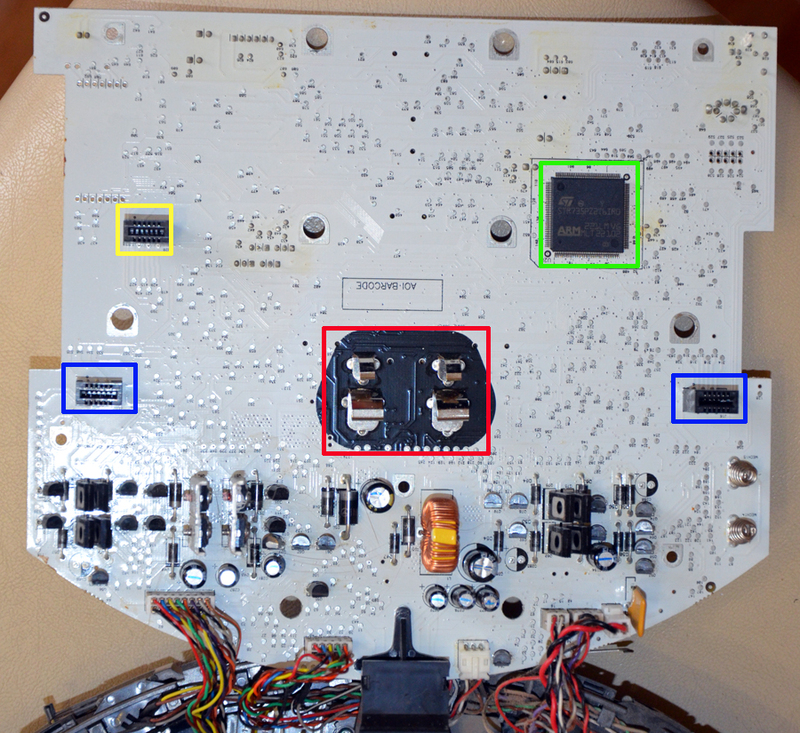
Она же с нижней.

Процессов здесь установлен, судя по надписям на корпусе, ARM. К сожалению, отснятые фото я просмотрел лишь когда полностью собрал пылесос. Потому невозможность прочесть маркировку заметил поздно. За это прошу прощения.

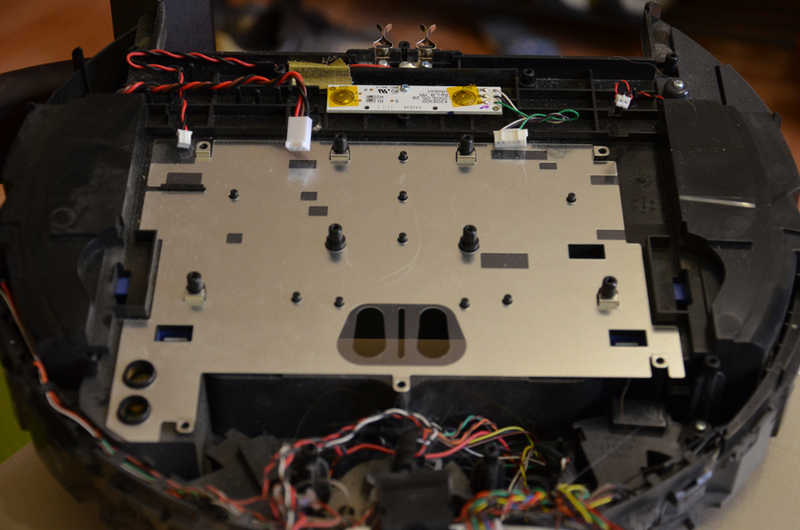
Ну, продолжим собирать. Для начала установим на место металлический экран, который, судя по всему, защищает управляющую электронику от наводок двигателей пылесоса.

Это обратная сторона пустого корпуса.

Это рамка с инфракрасными датчиками, которые устанавливаются за бампером пылесоса.

Здесь датчики крупным планом. Их на самом деле больше, по всей длине рамки.

Подключаем все датчики и двигатели к материнской плате.

Прикручиваем плату к корпусу.

Устанавливаем блок с кнопками и индикаторами.

Закрываем накладкой с обозначениями индикаторов.

Накрываем его декоративной/защитной крышкой.

Здесь я уже закрыл корпус и установил бампер. Процесс не трудный, ничего интересного.

Такс, тепер устанавливаем рабочие механизмы.
Начнем с двигателя щетки-пропеллера.


Теперь модуль правого колеса.


Далее блок щеток.


Ну и наконец батарея. Она здесь довольно большая. С удобными лямками для её вынимания.

Кстати, она тут Никель-Метал-Гидридная. На 3000 мА*ч.

Нижняя сторона батареи с контактной площадкой.


Осталось закрыть все крышкой.

Кстати вращение переднего колеса тоже контролируется датчиком. Если вращения нет, значит мы застряли и надо запускать меры по выпутыванию из сложившейся ситуации.

Устанавливаем блок переднего колеса.

Просто вставляется и слегка защелкивается.

Ну и само колесо. Кстати, оно разных цветов именно для датчика.



Осталось установить мусоросборник.


Вот я и собрал полностью пылесос.

На материнской плате имеется порт, похожий на PS/2. Скорее всего для перепрошивки пылесоса. Хотелось бы узнать у читателей, может кто проделывал со своим пылесосом такое?
За качество фоток прошу прощения, фотографирую практически впервые в жизни. Да и к тому же на телефон. =)
Осторожно!
Под катом много фото разобранного пылесоса, шерсти и чуть-чуть плавленой пластмассы.
История покупки

Некоторые тонкости и советы
1. Используй правильный пылесборник.
Если Вам нужен идеальный пол, почти как после влажной уборки — используйте обычный пылесборник. Но только после того как пылесос прошелся с бачком для шерсти, иначе задолбаетесь чистить.
2. Убираться надо часто.
В нашем случае каждый день, в крайнем случае, через день. Тогда и шерсти на щетках не много и ролики не стираются.
4. Поднимайте важные, и вообще вещи с пола перед уборкой (он у меня как то SD карту собрал).
5. Если есть мебель, которая чуть ниже румбы, лучше ее отгородить виртуальной стеной. Тут дело в том, что оптические датчики стены у пылесоса находятся не на верхней кромке пылесоса, а почти посередине, в связи с этим, когда румба перемещается вдоль низкой мебели, он все время норовит под нее залезть. Иногда у него это получается, он застревает и приходится его освобождать и запускать заново. Благо, такое место у нас только одно.
6. Базу пылесос может искать очень долго, поскольку определяет ее не с помощью радио частот, а по инфракрасному датчику. Поэтому, старайтесь устанавливать базу в легкодоступном и открытом месте.
Это, пожалуй, основные правила при работе с пылесосом.
Чистим румбу
Сам процесс чистки в среднем занимает не более 5 минут, для этого нам нужно предпринять следующие шаги:
1. Кладем Roomba к вверх лапами.
2. Снимаем пылесборник и вытряхиваем содержимое в мусор.

3. Открываем отсек для щеток, для этого надо нажать две желтые защелки (их видно на верхнем фото, одна у меня обломана т.к. доблестная теща пыталась сама почистить пылесос (Люба — привет!)). И извлекаем сами щетки.

Кстати, я их еще ни разу не менял, хотя в комплекте лежат запасные.
4. Снимаем с них ворс и чистим ниши подшипников.
Чернота внутри ниши — это оплавленная пластмасса. Волосы наматываются на ось между подшипником и нишей, чем больше наматывается, тем сильнее подшипник давит на щетку. А это все еще и вращается, короче, можно убить щетку или блок щеток за 10 уборок, если не следить.
5. Откручиваем боковую щетку и извлекаем из под нее шерсть. Должен признать, что эта и следующая процедура требуется не чаще чем раз в четыре — пять уборок.
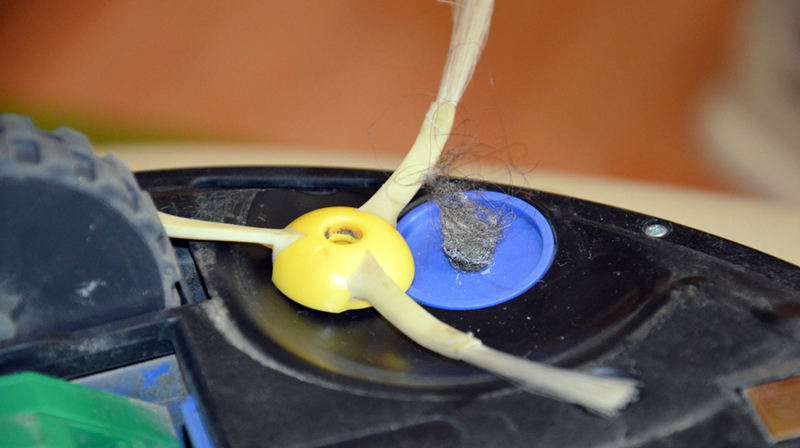
6.Вынимаем переднее колесо, просто тянем вверх.

Тут придется вытолкнуть ось из колеса, т.к. там тоже собирается ворс, тем самым осложняя его вращение.
Собственно и все, собираем румбу в обратном порядке и возвращаем на базу.
Препарируем Roomba
Для этого нам понадобится:
1. Отвертки крестовые, разных размеров.
2. Пластиковая лопатка для разборки телефонов.
3. Около часа времени.
1. Откручиваем 4 болта и снимаем нижнюю крышку.
Там нас ожидает батарея:
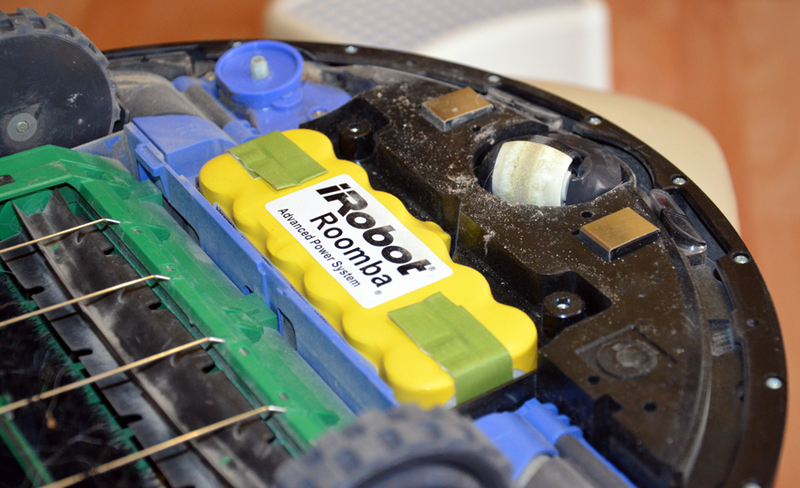
Ni-MH на 3 Ач, 14.4В

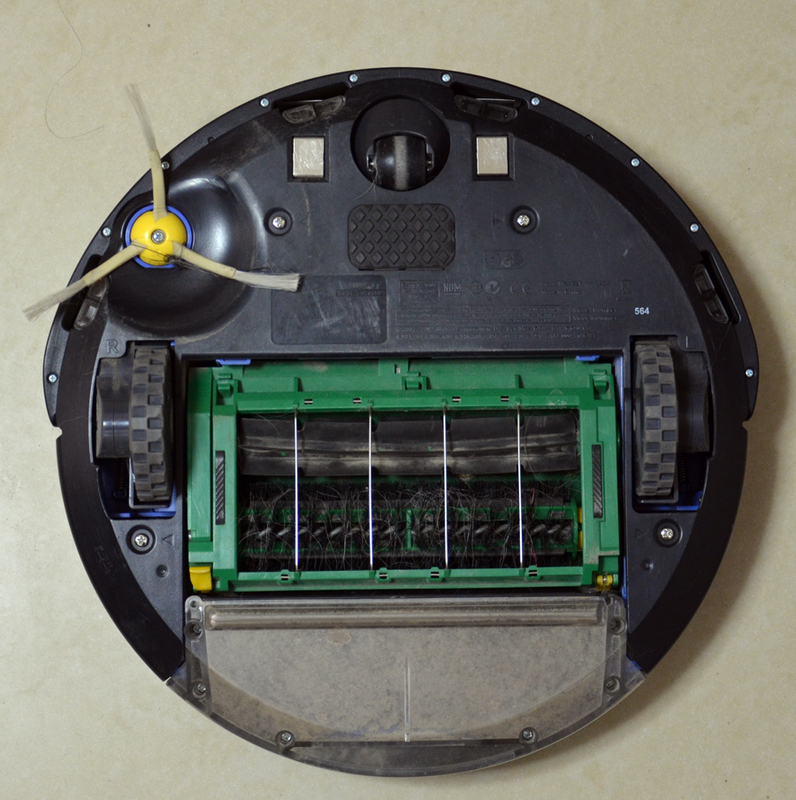
А так же доступ к блоку щеток:
2. Еще четыре болта, и блок щеток извлекается (обозначения сверху).
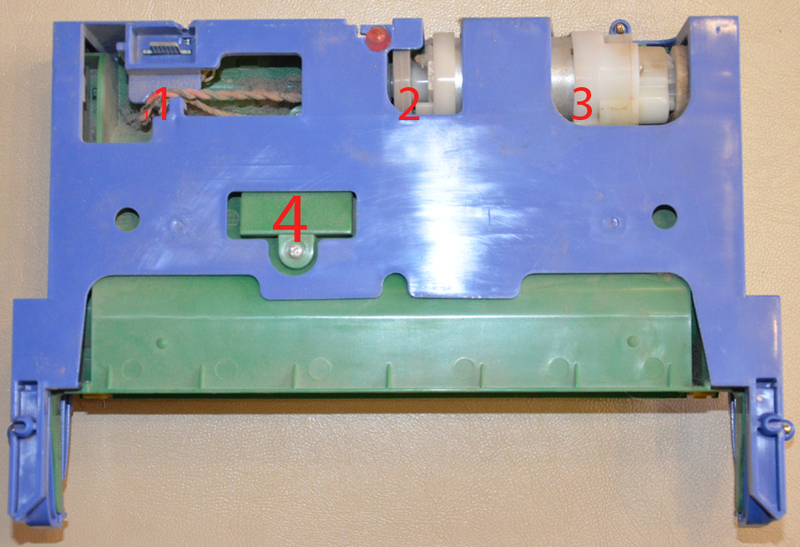
1. Коннектор привода щеток. 2. Колесо натяжки и пассик. 3. Сам привод щеток.
4. Датчик загрязнения (Буду признателен, если кто-нибудь расскажет как он работает)
3. Закрытый блок привода щеток.
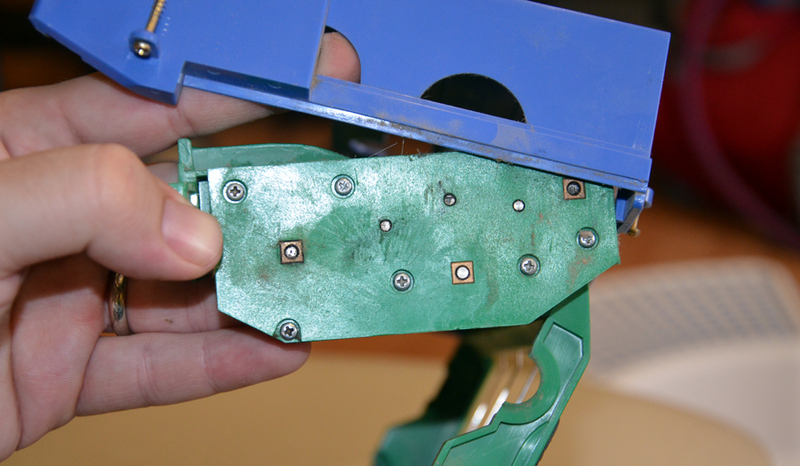
Видно некоторое загрязнение, но смазка еще свежая. Учитывая срок эксплуатации вполне неплохо.
Вытер шестеренки, смазал вазелином и закрыл обратно.
4. Поддеваем верхнюю крышку при помощи пластмассовой лопатки и отщелкиваем крепление.

5. Снимаем бампер, откручивая 8 болтов в нижней его части и аккуратно снимаем, там же, в башенке расположен инфракрасный приемник (крепится двумя болтами). Он служит для определения виртуальных стен, базы и ИК пульта.
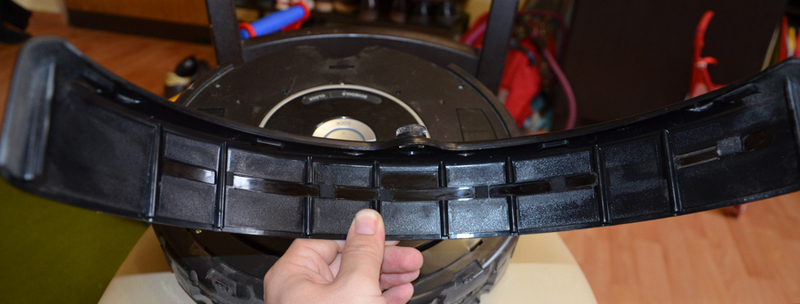
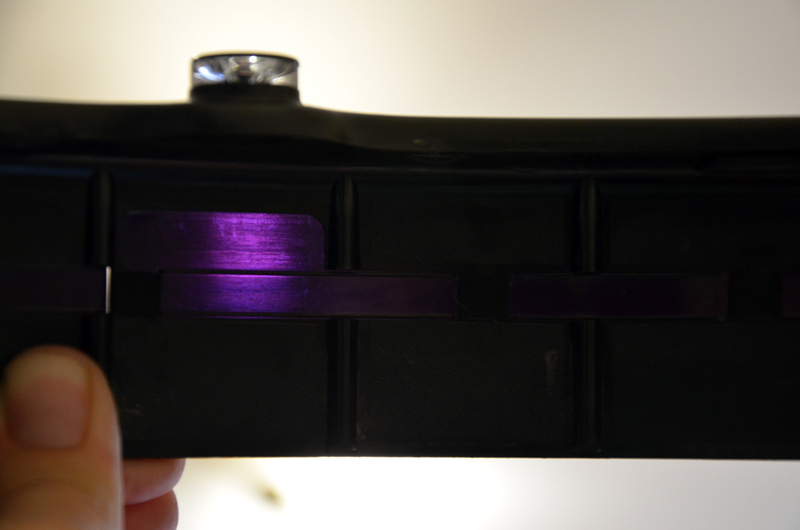
В бампере имеется амбразура из темного, полупрозрачного пластика, для 6-ти оптопар. Они служат для определения объектов и стен, а так же для поиска базы.
Передняя часть без бампера.
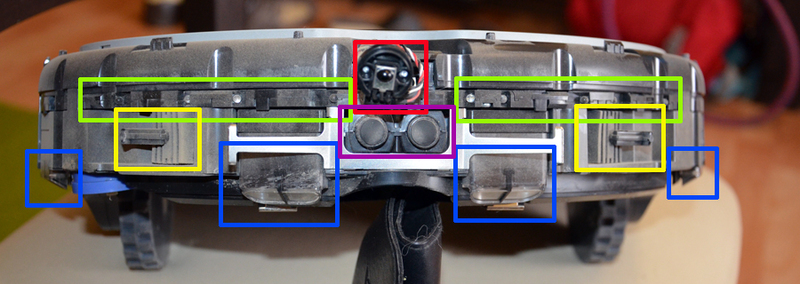
Далее по цветам:
*красный — ИК приемник.
*салатовый — оптопары для навигации.
*синий — 4 датчика высоты, так же исполнены оптопарами.
*Фиолетовый — амортизаторы бампера.
*желтый — концевые выключатели, для определения стороны столкновения.
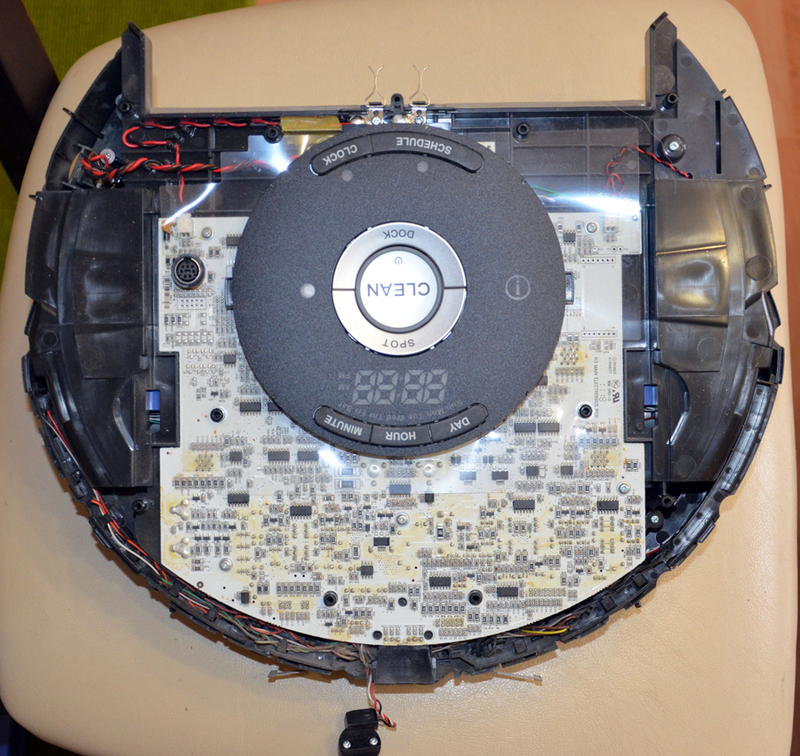
6. Верхняя часть робота, без основной крышки.

Еще 10 болтов для доступа к плате (красным) и разъем для программирования (зеленым).
7. Откручиваем болты, и нас от мозга робота отделяет только блок управления.
8. Еще два болта под основной пленкой блока управления и мы у цели.
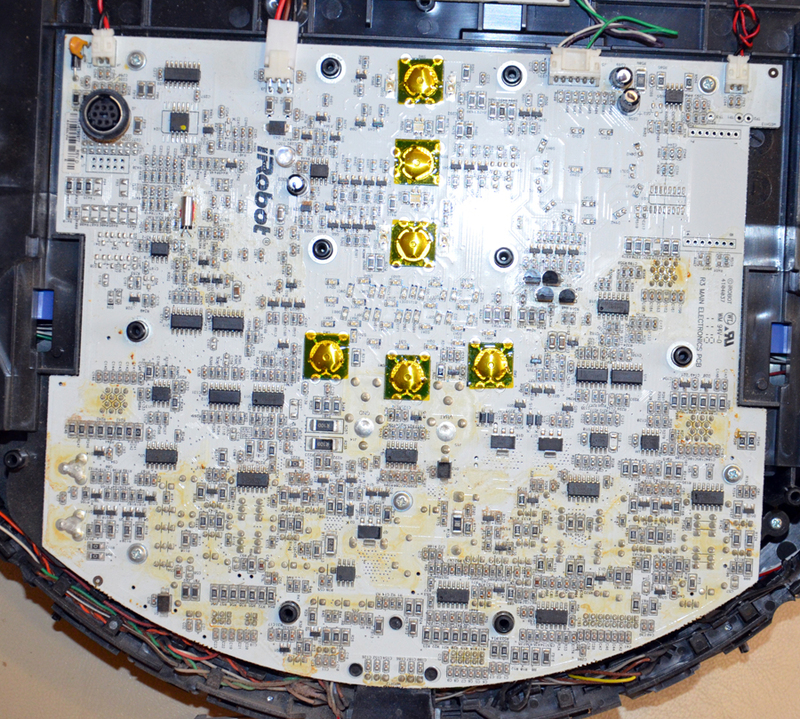
Тут мы видим абсолютный салат из огромного количества сопротивлений, диодов, транзисторов, компараторов, конвертеров, ледов, кнопок, конедеров и т.п.
Для желающих посмотреть поближе полный формат, правда, фокус не везде удался:
 |  |  |
 |  |  |
9. И снова 4 болтика…
10. Ну а под платой, каркас пылесоса.
Надо отметить довольно чистый, с десяток волосков внутри и все.
Все запчасти вместе.

Собираем в обратном порядке.
Эпилог
Могу откровенно сказать — Roomba стоит своих денег и отрабатывает их по полной. Все рекомендации абсолютно верны только для нашей, отдельно взятой квартиры, и ее обитателей, у Вас же это может варьироваться в зависимости от площади, наличия домашних животных и прочих факторов.
Ходовую часть, боковую щетку и турбину пылесборника, я не стал разбирать, поскольку там смотреть особо не на что, только моторы.
Также отмечу, что за все время эксплуатации ни разу не менял ни одной запчасти и не прибегал к помощи сервис центра.
И наконец, я ни коим образом не связан с фирмой iRobot или другими компаниями из данной отрасли.
P.S.:
1. Текст может содержать пунктуационные, грамматические и смысловые ошибки, об оных прошу сообщать в личку.
2. Мысли, идеи, вопросы, технические поправки — напротив, приветствуются в комментариях.
3. Прошу прощения за возможные технические неточности.

Современные люди не представляют свою жизнь без таких гаджетов, как роботизированные пылесосы. Когда они выходят из строя, нарушается привычный ритм жизни, что доставляет немало проблем. Чтобы такой девайс прослужил как можно дольше, нужно проводить регулярную чистку его узлов и деталей. На том, каким образом можно почистить колеса робота-пылесоса своими руками, остановимся подробнее.
Чистка ходовой части умного пылесоса
Ходовая часть электронного помощника со временем загрязняется даже в чистой квартире, что может привести не только к замедленной работе и появлению проблем, но и к полному выходу прибора из строя.
Чистка боковых колес
Уход за боковыми колесами не представляет никаких сложностей. Достаточно осмотреть их на предмет намотанных волос, ниток, шерсти и удалить имеющийся мусор. Также нужно протереть протектор слегка влажной тряпкой. Если на ось намотались волосы и шерсть, потребуется разборка.

Поворотный ролик
Чистка переднего колеса робота-пылесоса потребует больше времени. На данный элемент возлагается функция задавать направление движения устройству.
Внимание! С роликом нередко возникают разные нюансы (загрязнения, скрипы, писки), поэтому ему нужно уделить более пристальное внимание.

Для чистки колеса необходимо выполнить такие действия:
- Отключить девайс, перевернуть и поместить на ровную поверхность.
- При помощи отвёртки поддеть модуль ролика и вынуть из корпуса.
- Разъединить все элементы на составляющие: ролик, металлический штырь, пластиковый элемент с осью.
- Все детали тщательно очистить от пыли, волос и других загрязнений, протереть влажной тряпкой.
- Собрать узел в обратной последовательности.
Уход за роботом не представляет ничего сложного, но, если этой процедуре не уделять внимание, на двигатель и редуктор возрастает нагрузка. В результате снижается не только эффективность уборки, но также есть вероятность поломки гаджета. Поэтому нужно следить за своим электронным помощником во время рабочего цикла. Если замечаете, что переднее колесо издает нестандартные звуки, движется с рывками, нужно провести осмотр ролика, но и про ведущие колеса забывать не стоит. Они имеют резиновый протектор, который со временем также загрязняется и сцепление с поверхностью ухудшается.
Читайте также: