
Схемы управления работой исполнительных механизмов типа эбу
Одним из важнейших элементов практически всех современных двигателей является электронный блок управления. Это название довольно длинное, так что его сокращают до ЭБУ двигателя. Блок имеет сложное устройство, а его производством занимается ограниченное число фирм. По факту, они же владеют патентами и ограничивают деятельность других фирм, но это уже другой вопрос. Грамотному автолюбителю стоит разбираться в том, что представляет собой ЭБУ двигателя, какое место в структуре автомобильных систем он занимает, какие элементы ему подконтрольны и по каким причинам он может выйти из строя. Обо всем этом – в материале Avto.pro.
Важная ремарка
Сразу отметим, что под ЭБУ понимают вообще все встраиваемые системы, которые получают управляющие сигналы от одной или сразу нескольких систем и подсистем автомобиля. Звучит довольно сложно, так что попробуем разобраться. К примеру, в большинстве автотранспортных средств используются такие управляющие системы и подсистемы:
- Контроллер ЭСУД . Часто его называют просто контроллером системы управления ДВС;
- ECM . Тот самый модуль управления двигателем;
- ECU . Еще один электронный блок управления, однако этим сокращением принято обозначать основу всех электронных управляющих систем автомобиля.
- Электронная управляющая система состоит из множества блоков и модулей;
- Каждый блок и модуль является специализированным и не может взять на себя задачи другого блока и модуля.
Основным и наиболее часто встречающимся блоком управления является ЭБУ двигателя . Не совсем правильно будет называть его самым важным, но по факту он контролирует работу силового агрегата, а значит, от его работоспособности зависит очень многое. Например, он считывает и оптимизирует ряд важнейших параметров автомобиля: крутящий момент, состав выхлопных газов, мощность, расходник топлива. В тандеме с ЭБУ двигателя работает целая плеяда датчиков. Далее мы будем рассматривать именно ЭБУ двигателя, а обозначать его будем просто как ЭБУ. И еще раз напоминаем: электронных блоков много, однако в рамках данного материала для простоты мы будет обозначать управляющий элемент двигателя как ЭБУ.
Подробнее об устройстве ЭБУ
- Процессорная часть, иначе называемая микроЭВМ;
- Элементы, формирующие сигналы, иначе входные и выходные формирователи;
- Источник питания;
- Многополюсный штекерный разъем.
Как устроена процессорная часть
- Центральный процесс;
- Постоянное запоминающее устройство (сокр. ПЗУ);
- Аналогово-цифровой преобразователь (сокр. АЦП);
- Оперативное запоминающее устройство (сокр. ОЗУ);
- Порты ввода и вывода;
- Генератор тактовой частоты;
- Таймеры, иначе называемые счетчиками.
Можно провести параллель между современным компьютером и процессорной частью ЭБУ . По факту, в ЭБУ объединяется ряд компонентов, которые в системных блок персональных компьютеров и ноутбуков идут отдельно друг от друга, но объединяются материнской платой. Здесь есть интересные особенности, но их мы рассматривать не будем – автолюбителю важно понимать, что принципиальные схемы современных электронно-вычислительных машин очень похожи друг на друга.
Центральный процессор ЭБУ подбирает команды и данные из памяти и производит различные операции над этими данными. Кроме того, он управляет сигналами, проходящими через внутреннюю шину адреса и данных. Постоянное запоминающее устройство – это то место, где хранятся программы и данные. Информация имеет вид констант. Сама же программа записывается в виде машинных кодов микроЭВМ. Данные представляют собой калибровочные таблицы констант , участвующих в процессе расчетов. Данные из таблиц могут быть выбраны и в качестве управляющих параметров. Что интересно, данные в ПЗУ хранятся неограничено долго . Оперативное запоминающее устройство берет на себя задачу хранения данных, которые могут измениться. Например, промежуточных результатов вычислений или же значений, получаемых от датчиков. Хранить информацию ОЗУ может в течение ограниченного промежутка времени – она стирается после отключения питания.
Тандем центральный процессор – ПЗУ – ОЗУ является ключевым для ЭБУ. Если говорить по-простому, именно этот тандем выделяет данные и параметры, обсчитывает их, запоминает и отдает команды. К этому тандему также можно отнести так называемые энергонезависимые ОЗУ . Они питаются от аккумуляторной батареи напрямую. Такая память может записать данные и хранить их очень долго. Пока аккумулятор не потеряет накопленную энергию вследствие саморазряда, энергонезависимые ОЗУ продолжат хранить данные.
Важным элементом ЭБУ является аналогово-цифровой преобразователь. Дело в том, что однокристальные микроЭВМ могут работать только с цифровыми сигналам. В АЦП аналоговый сигнал преобразуется в цифровой код . Порты ввода и вывода, как несложно догадаться из их названия, служат для получения и считывания входных сигналов и передачи выходных сигналов и информации. Таймером же называют устройство, которое служит как для измерения интервалов времени , так и подсчета числа событий . Генератор тактовой частоты призван синхронизировать работы всей системы за счет выработки тактовых импульсов. От точности работы генератора будет зависеть точность измерения интервалов времени.
Как работают формирователи входных и выходных сигналов
- Аналоговые;
- Дискретные;
- Частотные.
Формирователи делятся на подтипы в зависимости от того, с какими сигналами они работают. Это связано с тем, что разные типы сигналов имеют различные параметры . Вот например:
- Аналоговые сигналы меняются во времени непрерывно. Примером является сигнал с датчика положения дроссельной заслонки. Непрерывно поступающие сигналы проходят через обработку в формирователи, а затем поступают к аналогово-цифровому преобразователю и к процессорной части ЭБУ;
- Дискретные сигналы меняются скачкообразно и являются прерывистыми. В качестве примера можно взять сигнал включения зажигания. Его изменения происходит резко, а сам сигнал поступает сначала в преобразователь, а затем напрямую в процессорную часть ЭБУ;
- Частотные сигналы наиболее интересны. Они не просто изменяют частоту – эти изменения сами по себе несут информацию о реальных изменениях величин, которые измеряет датчик. Соответственно, и обработка этих сигналов будет сложной. Сначала они ограничиваются по амплитуде, а затем поступают на вход таймера.
Неисправности устройства
В силу того, что ЭБУ является ключевым управляющим элементом силового агрегата, его неисправности сразу сказываются на работе агрегата и автолюбитель не сможет не заметить проблемы. Другое дело – проведение диагностики устройства. Зачастую проблема кроется не в самом блоке управления, а в проводке и конкретных датчиках. Причин, по которым сам ЭБУ может выйти из строя, довольно много. Вот наиболее частые:
- Короткое замыкание одного или нескольких соленоидов;
- Сильные механические воздействия или вибрации, результатами которых является появления трещин в плате ЭБУ и на местах спайки контактов;
- Перегрев электронного блока вследствие резких перепадов температур – от низких до высоких (такое иногда наблюдается в автомобилях, эксплуатируемых в условиях сильного холода);
- Попадание влаги в устройство и коррозияю
- Перестал гореть Check Engine;
- Зажигание начало работать с частыми пропусками;
- Вентилятор охлаждения двигателя начал включаться произвольно;
- Отсутствует связь с устройством (можно понять по ходу диагностики сканером);
- Двигатель начал троить, перестал заводиться, сильно изменился выхлоп;
- Автомобиль реагируют на манипуляции с педалью газа неадекватно;
- Предохранительные элементы начали часто перегорать без видимых причин;
- Сигналы с датчиком начали поступать нерегулярно, или перестали поступать вовсе.
И это лишь часть возможных симптомов. Автолюбителям важно понимать, что перед диагностикой ЭБУ имеет смысл проверить другие компоненты электронной бортовой системы автомобиля . К примеру, если наблюдаются проблему с одним из датчиков, стоит проверить в первую очередь его, затем его проводку, а уже затем ЭБУ.
Самостоятельная диагностика
К несчастью, бывают случаи, когда компьютер не удается подключить к блоку. В этом случае автолюбителю понадобится осциллограф, кабель и специализированное программное обеспечение. Нужный софт найти несложно, а вот с осциллографом могут возникнуть проблемы. Далее, диагностику нужно будет продолжить уже при помощи тестера или же мультиметра. Автолюбителю придется внимательно изучить электрическую схему контроллера и производить замеры сопротивлений. Лучше всего обратиться к специалистам, но если у автолюбитель хорошо подкован в вопросам электротехники и имеет много времени для диагностики, выявить проблему он сможет и самостоятельно.
Вывод
ЭБУ двигателя – это, пожалуй, самый ответственный элемент бортовой электросистемы автомобили. Благодаря нему силовой агрегат имеет оптимальную производительность, состав выхлопа и высокую стабильность работы. Неисправности в работе ЭБУ возникают часто, но в большинстве случаев они обусловлены проблемой с каким-либо электрическим и электромеханическом элементом автомобиля. Если проблема кроется именно в ЭБУ, то нередко единственным способом ее решения является… дорогостоящая замена блока. Советуем обращаться к проверенным специалистам для диагностики, а уже потом строить планы по покупке необходимых запчастей и дальнейшей их установке.
Если Вам понравилась публикация, поделитесь новостью в социальных сетях и подписывайтесь на канал .
Схемы электрических исполнительных механизмов с электродвигателем

Электрические исполнительные механизмы с электродвигателем предназначены для перемещения различных органов запорно-регулирующей трубопроводной арматуры поворотного принципа действия (шаровые и пробковые краны, поворотные дисковые затворы, заслонки).
Основными узлами исполнительного механизма являются: электродвигатель, редуктор, ручной привод, блок сигнализации положения. В механизмах используются синхронные и асинхронные двигатели переменного тока. Понижение частоты вращения и увеличение крутящего момента осуществляются при помощи комбинированных червячно-зубчатых передач. Ручное управление производится при помощи ручного привода. Воздействие на штурвал нажатием вдоль оси вала при остановленном двигателе приводит к зацеплению ручного привода с валом электродвигателя и передаче крутящего момента на выходной вал.
Исполнительные механизмы с электродвигателем бывают однооборотные и многооборотные, позиционные и пропорциональные. Схема двухпозиционного исполнительного механизма с двухфазным конденсаторным электродвигателем приведена на рис. 1(а).
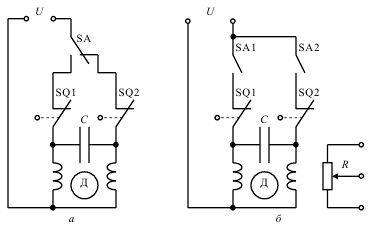
Рис. 1. Схемы исполнительных механизмов с двухфазными электродвигателями: а — схема двухпозиционного исполнительного механизма; б - схема пропорционального исполнительного механизма
Переключатель SA задает направление вращения ротора электродвигателя, подключая конденсатор С либо к одной, либо к другой обмотке электродвигателя. Если переключателем SA замкнуть цепь, содержащую SQ1, то электродвигатель включается и перемещает выходной орган исполнительного механизма до тех пор, пока он не достигнет крайнего положения и не переключит концевой выключатель SQ1. При этом контакт SQ1 разомкнётся, двигатель отключится. Чтобы перевести выходной орган в другое крайнее положение, необходимо переключить SA. Двигатель реверсируется и будет работать до размыкания контакта концевого выключателя SQ2.
Схема пропорционального исполнительного механизма представлена па рис. 1(б). Замыкание контакта SA1 вызывает перемещение выходного органа исполнительного механизма в прямом направлении, а замыкание SA2 - в обратном. Разомкнув контакт, можно остановить механизм в любом промежуточном положении выходного органа. Потенциометр R используется в качестве датчика положения. Концевые выключатели SQ1 и SQ2 отключают электродвигатель в крайних положениях, защищая механизм от поломки.
Схема исполнительного механизма с трехфазным электродвигателем представлена на рис. 3.
Такой исполнительный механизм может использоваться, например, для управления задвижкой. Схема содержит контактор КМ1, включающий механизм на открывание задвижки, с кнопкой SB1 "открыть" и контактор КМ2 с кнопкой SB2 "закрыть". Концевой выключатель SQ1 срабатывает в крайнем положении "закрыто". На схеме концевые выключатели изображены в среднем положении задвижки, ни один из них не сработал.
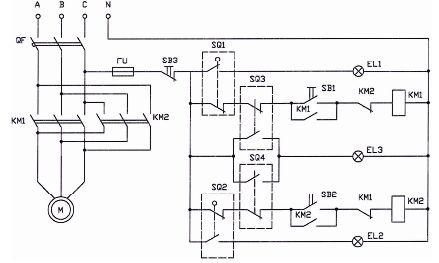
Рис. 2. Схема исполнительного механизма с трехфазным электродвигателем
При нажатии кнопки SB1 сработает КМ1 и включит электродвигатель на открывание задвижки. В крайнем открытом положении сработает SQ1 и своим размыкающим контактом отключит КМ1 и, соответственно, электродвигатель, а замыкающим контактом включит лампочку сигнализации EL1 "открыто".
Если после этого нажать кнопку SB2, то сработает КМ2 и включит электродвигатель на закрывание задвижки. Когда задвижка закроется, сработает SQ2, отключит КМ2 и включит сигнализацию "закрыто" (EL2).
Исполнительный механизм оборудован муфтой предельного крутящего момента. В случае превышения момента на валу, например, при заклинивании задвижки в процессе открывания, сработает выключатель SQ3 и отключит электродвигатель, отключив контактор КМ1. При заклинивании механизма в процессе закрывания сработает SQ4 и отключит КМ2 и электродвигатель. Оба выключателя при срабатывании включают лампу индикации EL3 "авария". Кнопкой SB3 можно остановить электродвигатель в промежуточном положении задвижки.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Электрический исполнительный механизм как объект управления
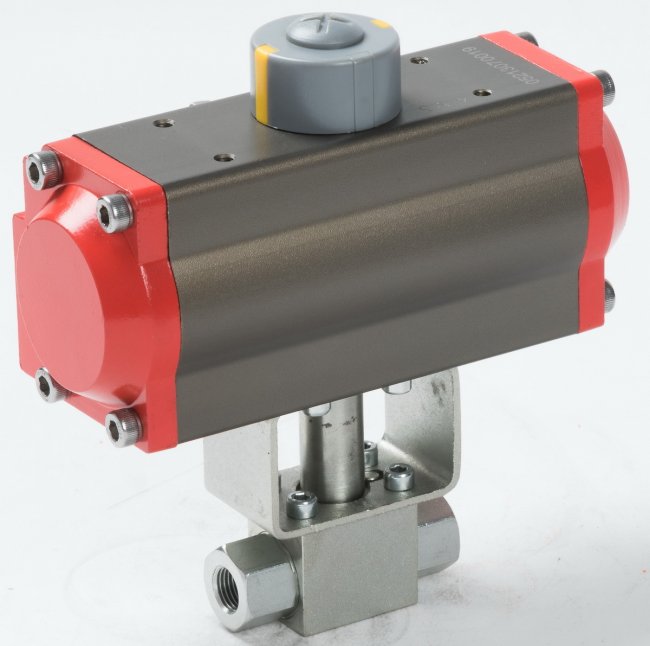
Регулирующая арматура, куда входят исполнительный механизм и собственно регулирующий клапан, представлена на рис. 1.

Рис. 1. Управляющий клапан с электрическим исполнительным механизмом или моторный клапан (control valve or motorised valve)
Выше уже отмечалось, что электрический исполнительный механизм в силу своих конструктивных особенностей и принципа действия представляет собой разновидность интегратора , который изменяет положение выходного вала или штока при подаче импульса управления (когда электродвигатель вращается) и сохраняет это положение при отсутствии управляющего воздействия.
Это свойство электрического исполнительного механизма существенным образом выделяет и характеризует его как объект управления.
Кроме того, при рассмотрении схем автоматизации с применением электроприводов необходимо также учитывать, что электропривод, являясь физическим устройством, потребляет значительную электрическую мощность, которая составляет от нескольких десятков Ватт до нескольких тысяч Ватт.
Принимая во внимание то обстоятельство, что выходные сигналы контроллера-регулятора, как правило, имеют очень низкую выходную мощность, то для управления исполнительным механизмом, взаимодействующим с реальным физическим процессом, выходной сигнал регулятора необходимо усиливать . Применение для этих целей устройств, выпускаемых НПФ КонтрАвт, приведено далее в статье.
В составе регулирующей арматуры электроприводы имеют и целый ряд специфических характеристик, которые следует учитывать или, как минимум, иметь о них отчетливое представление. Рассмотрим их более подробно.
Время полного хода клапана
Это время, в течение которого клапан перемещается от полностью закрытого состояния до полностью открытого состояния. Этот параметр является паспортизируемым для каждого механизма.
Это время должно соответствовать максимальной длительности импульса управления, при которой происходит увеличение выходного воздействия на 100 %. Следовательно, это время может быть принято в качестве времени (периода) следования ШИМ-модулированных импульсов управления, которое устанавливается в качестве одного из
параметров контроллера-регулятора.
Инерция клапана или время инерции клапана, выраженное в секундах
Время инерции – это время, в течение которого клапан продолжает перемещаться после того, как управляющий импульс с электропривода будет снят. Если этим временем невозможно пренебречь в силу каких-либо причин, то некоторое среднее его значение необходимо вычитать из времени импульса управления.
Для современных электроприводов с малоинерционными электродвигателями этот параметр можно не учитывать.
Люфт, мертвый ход или время мертвого хода (время выборки люфта), в секундах
Это минимальное время, необходимое для преодоления люфта механизма. Люфт в механизме может оказаться достаточным для того, чтобы вызвать проблемы в управлении. Если люфт велик, что особо характерно для электроприводов, находящихся длительное время в эксплуатации, мертвый ход механизма необходимо определить как
время, в течение которого выходной элемент механизма не начинает перемещаться после поступления импульса управления.
При формировании сигналов управления это время необходимо постоянно добавлять к командам управления с тем, чтобы механизм точнее позиционировал.
Таким образом, люфт приводит к гитсетрезису в поведении регулирующего органа. В современных механизмах люфт обычно не велик и не превышает 1 % от полного хода механизма. Поэтому его влияние проявляется не очень сильно: некоторые ограничения на работу механизма, накладываемые производителями механизмов, такие, как например, минимальное время импульса управления и время запрета реверса, могут оказывать более существенное влияние на динамику и точность позиционирования электропривода.
Минимальное время импульса управления, в секундах
Этот параметр при работе системы автоматического управления с электроприводом устанавливается с целью исключения слишком частого включения и выключения механизма и исключения чрезмерных и необоснованных пусков и остановок механизма, что может приводить к ускоренному износу шестерен и других кинематических узлов. Обычно
это время принимается равным 0,2 с.
Очевидно, минимальное время импульса должно быть сопоставимо с временем выборки люфта. Если, тем не менее, после настройки контура управления процессом активность клапана чрезмерно высокая и он постоянно переключается на открытие и закрытие, то это время рекомендуется увеличить. С увеличением этого времени может возрасти погрешность управления. Чем меньше это время, тем более точное управление.
При настройке системы автоматического управления потребуется выбор компромиссного решения.
Минимальная временная пауза между командами на изменение направления движения или запрет реверса без остановки в течение заданного времени, задаваемое в секундах или долях секунд
Этот параметр обычно задается производителем механизма и служит для исключения чрезмерных динамических нагрузок на кинематику механизма при реверсе, а также для уменьшения электромагнитных возмущений и перенапряжений, возникающих в электрической схеме электродвигателя и связанных с ним компонентах электропривода. Стандартами это время устанавливается не менее 50 мс.
На поведение системы управления и качество регулирования существенное влияние оказывает пропускная характеристика клапанов. Выделяют следующие характеристики:
- линейная пропускная характеристика (Л), у которой приращение относительной пропускной способности пропорционально относительному ходу;
- равнопроцентная пропускная характеристика(Р), у которой приращение относительной пропускной способности по ходу пропорционально текущему значению относительной пропускной способности;
- пропускная характеристика, соответствующая квадратному корню из значения относительного хода, что наиболее характерно, например, для шаровых клапанов;
- пропускная характеристика тарельчатого плунжера (Т) или пропускная характеристика двухпозиционного регулирования (открыто-закрыто);
- пропускная характеристика специальная, зависимость которой от относительного хода определяется специальными условиями применения клапана.
Графики некоторых характеристик приведены на рис. 2.

Следует отметить, что идеальный клапан равнопроцентной пропускной характеристикой не закрывается полностью и для обеспечения его полного закрытия в реальных клапанах реализуются различные конструктивные меры.
Линейная расходная характеристика при своей простоте и очевидности не всегда приемлема для регулирования технологических параметров. Так, например, при регулировании подачи тепла в теплообменники систем отопления, вентиляции и кондиционирования взаимосвязь между выходом тепла и положением открытия конечного регулирующего элемента носит явно выраженный нелинейный характер, что представлено на рис. 3.

Для достижения высокой стабильности управления конечный гидравлический регулирующий элемент должен обладать такой характеристикой потока, которая дополняет нелинейную характеристику теплообменника, а именно такой характеристикой или близкой к ней обладают клапаны с равнопроцентной характеристикой.
Равнопроцентную расходную характеристику регулирующего клапана можно обеспечивать как конструкционными мерами, например, применением так называемых корректирующих дисков или обеспечением специального профиля запорного узла клапана, так и заданием специального алгоритма позиционирования электропривода.
Здесь следует также заметить, что требуемой линейности в регулировании процессов с теплообменными агрегатами можно добиться и путем изменения технологической схемы регулирования с применением так называемых трехходовых клапанов, что иногда бывает более целесообразным и по соображениям экономичности схемы теплоснабжения.
Трехходовой регулирующий орган или клапан (смесительный, разделительный) – это такой регулирующий орган, в котором происходит изменение соотношения пропускных способностей и имеющий три присоединительных прохода, через которые один поток разделяется на два (разделительный) или два потока смешиваются в один (смесительный). Трехходовые клапаны бывают седельные и шаровые.
Рассмотрим работу такого клапана на примере седельного, представленного на рис. 4.

Подводя итог рассмотрению электрических исполнительных механизмов как объектов управления, можно отметить, что Исполнительные механизмы сами по себе представляют целую науку [См. Густав Олсон, Джангуидо Пиани, Цифровые системы автоматизации и управления. -СПб.: Невский Диалект, 2001]. Применение электрических исполнительных механизмов в системах управления требует определенного навыка, опыта и специализированных для этих задач средств автоматизации.
Схемы управления
Далее мы рассмотрим несколько примеров практических схем управления с применением серийно выпускаемого ООО НПФ КонтрАвт оборудования при реализации контуров управления с использованием электрических исполнительных механизмов.
Рис. 5. Управление однооборотным исполнительным механизмом типа МЭО 16/63 0,25-У-01

Рис. 6. Управление приводом однооборотным типа SP 0.1 производства REGADA (Словакия)

Рис. 7. Управление прямоходным электроприводом трехходового клапана отопительной системы

Рис. 8. Управление механизмом поворотным типа GT 31 (Gear motors GT) производства фирмы Kromshcroder (Германия)

Рис. 9. Управление механизмом поворотным типа GT 31…Е (Gear motors GT…Е) производства фирмы Kromshcroder (Германия)

Рис. 10. Управление электроприводом типа AMV 13, производства DANFOSS

Рис. 12. Управление двумя многооборотными электроприводами по одному параметру, например, по температуре

Приведем несколько комментариев к представленным выше схемам.
На рис. 5 представлен пример схемы управления наиболее распространенными электрическими исполнительными механизмами типа МЭО, МЭОФ производства ОАО “ЗЭиМ” г. Чебоксары, который в данной схеме осуществляет управление заслонкой. Для измерения технологического параметра (температуры) используется термопара, непосредственно подключенная ко входу микропроцессорного измерительного регулятора типа МЕТАКОН 514-Т, специально разработанного для управления исполнительными механизмами интегрирующего типа. В качестве усилителя выходного сигнала регулятора применен блок коммутации реверсивный типа БКР. Представленная схема обеспечивает бесконтактное управление электроприводом. Конечные выключатели крайних положений исполнительного механизма, в соответствии с рекомендациями производителя механизмов, включены в цепи управления, формирующие сигналы БОЛЬШЕ и МЕНЬШЕ. Дополнительные конечные выключатели механизма и потенциометрические датчики положения могут быть использованы по своему прямому функциональному назначению при решении задач автоматизации
конкретной технологической установки.
На рис. 6 представлен пример схемы управления приводом однооборотным типа SP0.1 производства фирмы REGADA, Словакия. Для измерения технологического параметра (температуры) используется термопара, подключенная к входу микропроцессорного измерительного регулятора типа МЕТАКОН 514-Т через преобразователь с выходным током 4…20 мА, что особо актуально при больших удалениях вторичных приборов от датчиков температуры.
В представленном примере реализуется также бесконтактное управление исполнительным механизмом, а отключение механизма в крайних положениях осуществляется конечными выключателями, включенными непосредственно в цепи питания электродвигателя механизма, благодаря чему уменьшается число проводов, поступающих от схемы управления к исполнительному механизму.
На рис. 7 представлена практически аналогичная предыдущей схема, с той лишь разницей, что в примененном исполнительном механизме привода трехходового клапана несколько изменена нумерация клемм, к которым подключается схема управления (такие механизмы достаточно часто встречаются в эксплуатации).
На рис. 10 представлена схема управления электроприводом типа AMV 13, производства DANFOSS, Дания. Здесь необходимо отметить, что используется модификация электропривода, рассчитанная на напряжение питания 230 В, 50 Гц при так называемом трехпозиционном регулировании, в отличии от аналогового управления.
В представленной на рис. 12 схеме предусмотрено также ручное управление запорной арматурой по схеме, которая несколько лучше той, что рекомендована поставщиком электропривода.
На рис. 12 представлена схема управления одновременно двумя исполнительными механизмами типа МЭО при регулировании по одному технологическому параметру, причем для одного из механизмов (А2) предусмотрено также ручное управление в обход электронной схемы управления и показана возможность организации сигнализации крайних положений исполнительного механизма.
На представленных рис. 5…12 показаны только наиболее типовые примеры из практически бесконечного множества возможных вариантов реализации схем управления с использованием электрических исполнительных механизмов и средств автоматизации, серийно выпускаемых ООО НПФ КонтрАвт, которые отмечены на приведенных выше схемах соответствующим ярлычком .
Исполнительные механизмы в системах автоматизации литейных процессов
Исполнительные механизмы в системах автоматического управления технологическими процессами предназначены для непосредственного воздействия на управляемый объект или его органы управления.
Исполнительные механизмы должны удовлетворять следующим требованиям:
иметь по возможности линейные статические характеристики;
обладать мощностью, достаточной для приведения в движение объекта управления или его органов во всех режимах работы;
иметь необходимое быстродействие;
обеспечить по возможности простое и экономичное регулирование выходной величины;
иметь малую мощность управления.
Особенности при работе в литейных цехах

Для систем автоматизации литейных процессов характерно наличие двух режимов управления: дистанционного и автоматического.
Для исполнительных механизмов в системах дистанционного управления основные показатели энергетические, кроме того необходимы эксплуатационные, конструктивные и экономические характеристики.
Для исполнительных механизмов в системах автоматического управления наиболее важными являются их статические и динамические свойства, которые влияют на устойчивость и качество регулирования. Эти особенности выбора исполнительных механизмов в системах автоматизации процессов литья необходимо учитывать при их проектировании.
Главными энергетическими параметрами исполнительных механизмов (дистанционное управление) являются номинальный момент (усилие, развиваемое при номинальном управляющем воздействии) и пусковой момент (усилие, развиваемое в момент включения под действием номинального управляющего сигнала).
Отношение пускового момента к приведенному моменту инерции исполнительного механизма определяет его инерционность, т. е. время от начала движения до установившейся номинальной скорости перемещения выходного органа. Для уменьшения времени разгона пусковой момент не должен превышать 2 — 2,5 номинального момента.

В системах позиционного регулирования, когда регулирующее воздействие имеет два установленных значения, исполнительные механизмы должны обеспечивать возможность изменения управляющего воздействия от максимального значения.
В системах с регуляторами постоянной скорости управляющее воздействие на объект определяется временем перемещения регулирующего органа, скорость перестановки которого зависит от технических данных исполнительных механизмов.
В системах пропорционального регулирования регулирующее воздействие на объект пропорционально отклонению параметра от заданного значения, а коэффициент пропорциональности зависит от конструкции исполнительного механизма, тормозных устройств и выбега после отключения.
В ряде систем автоматического управления литейными процессами исполнительные механизмы охватываются обратными связями по положению регулирующего органа. Укрупненная оценка статических и динамических свойств исполнительных механизмов осуществляется при рассмотрении их точности и быстродействия.
При проектировании исполнительные механизмы необходимо установить скорость перемещения его выходного устройства при номинальной нагрузке и управляющий сигнал, соответствующий номинальной скорости перемещения выходного устройства.
В системах автоматизации литейного производства применяют весьма разнообразные исполнительные механизмы. По конструкции их делят на электромеханические, электромагнитные, гидравлические, пневматические и комбинированные.
Электромеханические исполнительные механизмы
Электромеханические исполнительные механизмы используют для управления разнообразными запорными и регулирующими рабочими органами систем автоматизации. В их комплекты могут входить электродвигатель, редуктор, конечные выключатели, муфта предельного момента для защиты двигателя от перегрузок и датчик обратной связи.

К электромеханическим исполнительные механизмы относятся устройства поворота ковшей автоматизированной заливки, открывания-закрывания бункеров весовых дозаторов в системах шихтовки и смесеприготовления, загрузки плавильных агрегатов и др.

В указанных процессах литья электромеханические исполнительные механизмы обеспечивают:
остановку электропривода в любом промежуточном положении с помощью кнопок или контактов путевых выключателей;
аварийный останов при критических перегрузках;
дистанционную световую сигнализацию крайних положений рабочего органа (подъемника, днища бункера, литейного ковша и др.;
электрическую блокировку с другими механизмами.
Электромагнитные исполнительные механизмы
Электромагнитные исполнительные механизмы представляют собой совокупность электромагнита с перемещаемым им механическим устройством. Они сообщают поступательное движение приводу управляемого органа.

Электромагнитные исполнительные механизмы используют для управления клапанами, вентилями, задвижками и золотниками в системах автоматизации процессов регулирования подачи ваграночного дутья, подогрева, подачи кислорода в сталеплавильном процессе, в системах с применением электрогидравлических или электропневматических устройств, в которых электромагнит перемещает распределительный золотник и др.
Недостаток электромагнитных клапанов и вентилей заключается в том, что при практически мгновенных переключениях могут возникать гидравлические удары.
Гидравлические исполнительные механизмы
Гидравлические исполнительные механизмы широко применяют в автоматических литейных линиях и системах благодаря тому, что они допускают значительные кратковременные 5 — 7-кратные перегрузки, имеют большие выходные моменты (усилия) при малых размерах и могут обеспечить угловые ускорения свыше 20 000 рад/с.
Наиболее широко используют гидравлические поршневые исполнительные механизмы, где в качестве рабочей жидкости применяют нефтяные масла, синтетические жидкости, спирто-глицериновую смесь и др.
В литейных системах чаще других используют поршневые исполнительные механизмы простого и двойного действия.
К недостаткам гидравлических исполнительные механизмы следует отнести их большую массу, значительную мощность, расходуемую на управление и трудности ликвидации аварий .
Для исправления некоторых основных недостатков особое значение имеет выбор способа и закона торможения и расчет конструктивных параметров тормозных устройств гидроцилиндров, используемых в литейном производстве.
Выбор тех или иных гидроцилиндров и тормозных устройств определяется режимом их работы. При небольших скоростях допустимо применение приводных гидроцилиндров без тормозных устройств с остановкой движущихся частей конструкций или оснастки об упор. При увеличении рабочей скорости до 80 мм/с необходимо применение тормозных устройств.
Пневматические исполнительные механизмы

Пневматические исполнительные механизмы строят по такой же схеме, что и гидравлические. Различия их заключаются в свойствах рабочей среды (газа и жидкости). Сжимаемость газа оказывает отрицательное влияние на быстродействие системы, особенно при значительных нагрузках и ускорениях.
Пневматические исполнительные механизмы делят на поршневые и мембранные. В литейном цехе распространен поршневые пневматические исполнительные механизмы благодаря их простоте и низкой стоимости.
Вместе с тем агрессивные среды в процессах литейного производства вынуждают конструкторов разрабатывать специальные пневмоцилиндры для литейных автоматов. Такие пневмоцилиндры изготовляют в закрытом исполнении, при котором их штоки не соприкасаются с окружающей средой.
В них применяют односторонние цилиндры, соединенные одним штоком- рейкой с зубчатым колесом на выходном валу. Вращение вала преобразуется кривошипом в поступательное движение, и, хотя двойное преобразование ведет к потере мощности, эти механизмы долговечны.
Комбинированные исполнительные механизмы

Новые приводы от Festo позволяют решать задачи с помощью простых движений с электроприводом и интеллектуально обмениваться данными от контроллера к ПЛК через IO-Link. Эта серия электроприводов сочетает в себе простоту пневматики с преимуществами электрической автоматики.
Параметры для скорости подачи и возврата, силы нажатия, задания для конечного положения, демпфирования и ручного управления могут быть установлены непосредственно на приводе с помощью физических кнопок.
При выборе исполнительныж механизмов для систем автоматизации литейного производства учитывают их быстродействие, экономичность, бесшумность в работе. Каждый из этих показателей в той или иной степени может иметь важное значение для решения конкретной задачи автоматизации.
Однако имеется главный критерий, которому необходимо отдавать предпочтение при конструировании или выборе любого исполнительного механизма — это высокая надежность.
В связи с этим целесообразно шире использовать, где возможно, электромагнитные и электромеханические исполнительные механизмы с несложными кинематическими схемами.
В случаях применения гидравлических или пневматических испольнительных механизмов необходимо уделять внимание надежности уплотнительных устройств и понижению массы движущихся деталей.
Классификация электрических исполнительных механизмов

Электрическим исполнительным механизмом в системах управления обычно называют устройство, предназначенное для перемещения рабочего органа в соответствии с сигналами, поступающими от управляющего устройства.
Рабочими органами могут быть различного рода дроссельные заслонки, клапаны, задвижки, шиберы, направляющие аппараты и другие регулирующие и запорные органы, способные производить изменение количества энергии или рабочего вещества, поступающего в объект управления. При этом перемещение рабочих органов может быть как поступательным, так и вращательным в пределах одного или нескольких оборотов. Следовательно, исполнительный механизм с помощью рабочего органа осуществляет непосредственное воздействие на управляемый объект .
Исполнительные механизмы — это устройства, механически воздействующие на физические процессы путем преобразования электрических сигналов в требуемое управляющее воздействие. Аналогично датчикам, исполнительные механизмы должны быть подобраны соответствующим образом для каждой задачи. Исполнительные механизмы могут быть бинарными, дискретными или аналоговыми. Конкретный тип для каждой задачи выбирается с учетом необходимой выходной мощности и быстродействия.
В общем случае электрический исполнительный механизм состоит из электропривода, редуктора, узла обратной связи, датчика указателя положения выходного элемента и конечных выключателей.

В качестве электропривода в исполнительных механизмах используются либо электромагниты, либо электродвигатели с понижающим редуктором для снижения скорости перемещения выходного элемента до величины, обеспечивающей возможность непосредственного соединения этого элемента (вала или штока) с рабочим органом.
Узлы обратной связи предназначены для введения в контур регулирования воздействия, пропорционального величине перемещения выходного элемента исполнительного механизма, а следовательно, и сочлененного с ним рабочего органа. С помощью конечных выключателей производится отключение электропривода исполнительного механизма при достижении рабочим органом своих конечных положений во избежание возможных повреждений механических звеньев, а также для ограничения перемещения рабочего органа.
Как правило, мощность сигнала, вырабатываемого регулирующим устройством, бывает недостаточной для непосредственного перемещения рабочего органа, поэтому исполнительный механизм можно рассматривать как усилитель мощности, в котором слабый входной сигнал, усиливаясь во много раз, передается на рабочий орган.
Все электрические исполнительные механизмы, нашедшие широкое применение в самых различных отраслях современной техники автоматизации производственных процессов, можно разделить на две основные группы:
К первой группе относятся прежде всего соленоидные электроприводы , предназначенные для управления различного рода регулирующими и запорными клапанами, вентилями, золотниками и т. п. Сюда же можно отнести исполнительные механизмы с различными видами электромагнитных муфт . Характерная особенность электрических исполнительных механизмов этой группы состоит в том, что необходимое для перестановки рабочего органа усилие создается за счет электромагнита, являющегося неотъемлемой частью исполнительного механизма.
Для целей регулирования соленоидные механизмы обычно применяются только в системах двухпозиционного регулирования. В системах автоматического управления в качестве исполнительных элементов часто используются электромагнитные муфты, которые подразделяются на муфты трения и муфты скольжения.
Ко второй, наиболее распространенной в настоящее время группе относятся э лектрические исполнительные механизмы с электродвигателями различных типов и конструкций.

Электродвигательные исполнительные механизмы обычно состоят из двигателя, редуктора и тормоза (последнего иногда может и не быть). Сигнал управления поступает одновременно к двигателю и тормозу, механизм растормаживается и двигатель приводит в движение выходной орган. При исчезновении сигнала двигатель выключается, а тормоз останавливает механизм. Простота схемы, малое число элементов, участвующих в формировании регулирующего воздействия, и высокие эксплуатационные свойства сделали исполнительные механизмы с управляемыми двигателями основой для создания исполнительных устройств современных промышленных систем автоматического регулирования.
Существуют, хотя и не получили широкого распространения, исполнительные механизмы с неуправляемыми двигателями, которые содержат управляемую электрическим сигналом механическую, электрическую либо гидравлическую муфту. Характерной их особенностью является то, что двигатель в них работает непрерывно все время работы системы регулирования, а сигнал управления от регулирующего прибора передается рабочему органу через управляемую муфту

Исполнительные механизмы с управляемыми двигателями в свою очередь можно разделить по способу построения системы управления на механизмы с контактным и бесконтактным управлением.
Включение, отключение и реверсирование электродвигателей исполнительных механизмов с контактным управлением производится с помощью различной релейной или контактной аппаратуры. Это определяет основную отличительную особенность исполнительных механизмов с контактным управлением: у таких механизмов скорость выходного органа не зависит от величины управляющего сигнала, подаваемого на вход исполнительного устройства, а направление перемещения определяется знаком (или фазой) этого сигнала. Поэтому исполнительные механизмы с контактным управлением относят обычно к исполнительным устройствам с постоянной скоростью перемещения рабочего органа.
Для получения средней переменной скорости перемещения выходного органа исполнительного механизма при контактном управлении широко используется импульсный режим работы его электродвигателя.
В большинстве исполнительных механизмов, предназначенных для работы в схемах с контактным управлением, используются реверсивные электродвигатели. Применение электродвигателей вращающихся только в одну сторону, весьма ограничено, но все же имеет место.
Бесконтактные электрические исполнительные механизмы отличаются повышенной надежностью и позволяющие относительно просто получать как постоянную, так и переменную скорость перемещения выходного органа. Для бесконтактного управления исполнительными механизмами используются электронные, магнитные или полупроводниковые усилители, а также их сочетание. При работе управляющих усилителей в релейном режиме скорость перемещения выходного органа исполнительных механизмов постоянна.
Как электрические исполнительные механизмы с контактным управлением, так и бесконтактные можно подразделять также по следующим признакам.
По назначению: с вращательным движением выходного вала — одиооборотные; с вращательным движением выходного вала — многооборотпые; с поступательным движением выходного вала — прямоходпые.
По характеру действия: позиционного действия; пропорционального действия.
По исполнению: в нормальном исполнении, в специальном исполнении (пылеводозащищенном, взрывозащищениом, тропическом, морском и т. п.).
Выходной вал однооборотных исполнительных механизмов может вращаться в пределах одного полного оборота. Такие механизмы характеризуются величиной крутящего момента на выходном валу и временем его полного оборота.
В отличие от однооборотных многооборотные механизмы, выходной вал которых может осуществлять перемещение в пределах нескольких, иногда значительного количества, оборотов, характеризуются также полным числом оборотов выходного вала.

Прямоходные механизмы имеют поступательное движение выходного штока и оцениваются усилием на штоке, величиной полного хода штока, временем его перемещения на участке полного хода и по скорости движения выходного органа в оборотах в минуту для однооборотных и многооборотных и в миллиметрах в секунду для прямоходных механизмов.
Исполнительные механизмы пропорционального действия конструктивно таковы, что обеспечивают в заданных пределах установку рабочего органа в любое промежуточное положение в зависимости от величины и длительности управляющего сигнала. Подобные исполнительные механизмы могут использоваться как в позиционных, так и в П, ПИ и ПИД-системах автоматического регулирования.
Существование электрических исполнительных механизмов как нормального, так и специальных исполнений в значительной мере расширяет возможные области их практического применения.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Читайте также: